

2.3 Организация обратных связей по регулируемым
координатам
1)Для измерения напряжения и тока якорной цепи в КЭП используется схема
При больших токах используют также измерительные трансформаторы тока
Коэффициент передачи датчика тока
kзв.с kшkя.д.с |
Uk.max |
(3.22) |
|
Imax |
|||
|
|
Рекомендуется округлить до ближайшей меньшей величины, удобной для масштабирования
Коэффициент передачи датчика напряжения
kзв.н kдkд.н UК.max (3.24) |
Рекомендуется округлить до |
ближайшей меньшей величины, |
|
Umax |
удобной для масштабирования |

2.3 Организация обратных связей по регулируемым координатам
2)Измерение ЭДС выполняют косвенно на основе информации о напряжении и токе якорной цепи
|
uд p |
|
|
|
|
U ДE p kE |
|
RЯ i р |
(3.27) |
||
|
|||||
Tяд p 1 |
|
|
|||
где
Tяд LЯ  RЯ – постоянная времени цепи якоря собственно двигателя
RЯ – постоянная времени цепи якоря собственно двигателя
kE |
kзв.нR0 |
|
Uk.max |
– коэффициент передачи |
|
R2 R3 |
Eдв.max |
||||
|
|
датчика ЭДС |
Рекомендуется округлить до ближайшей меньшей величины, удобной для масштабирования
Передаточная функция инерционного датчика ЭДС
U ДЕ р |
|
kE |
|||
Wд.е p |
|
|
|
|
|
|
Ед р |
|
|
||
|
|
Tяд p 1 |
|||

2.3 Организация обратных связей по регулируемым координатам
3) Измерение скорости чаще выполняют с помощью тахогенератора
постоянного тока • Из справочника КЭП (с.180, 181) выбирается тахогенератор постоянного тока;
• Подбираются резисторы в цепи нагрузки тахогенератора (максимальное напряжение на R2 не должно превышать Uk.max);
•Выбирается конденсатор С, исходя из необходимой величины постоянной времени
фильтра |
|
|
|
обычно Тф составляет от |
T R1R2C |
(3.32) |
|||
ф |
R1 |
R2 |
5 до 40 мс |
|
|
|
|||
•Определяют коэффициент передачи датчика скорости
k |
k |
k |
|
k |
|
Uk.max |
(3.33) |
Рекомендуется округлить до |
|
ТГ |
|
д |
|
ДН |
max |
ближайшей меньшей величины, |
|
|
|
|
|
|
|
|
удобной для масштабирования |
|
|
|
|
|
|
|
|
|
•передаточная функция датчика скорости принимается в виде
U ДШ р |
|
k |
|
|||
Wд.ш p |
|
|
|
|
(3.29) |
|
|
р |
|
|
|||
|
|
Tф p 1 |
|
|||

2.4Структурная схема объекта регулирования
1)Приводится структурная схема объекта регулирования
ТПЯ
Uy.Я |
k |
uЯ |
1 R |
Я |
iЯ |
|
ТПЯ |
|
|
|
|
|
TТПЯ p 1 |
|
TЯ p 1 |
|
|
ТПзб
Uy.зб |
|
uзб |
1 |
|
Tвc p 1 |
|||||
k |
|
|||||||||
|
|
|
T p 1 |
|
|
|
Rзб |
Tзб p 1 |
||
|
|
|
ТПзб |
|
|
|
|
|
|
|
|
|
|
ТПзб |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
МС |
|
М |
1 |
|
|
J p |
Схема приведена |
ед |
|
для наиболее |
|
общего случая |
|
|
|
J Jдв Jмeх
k
iзб kФ Ф
Tвc p 1
2) В виде таблицы приводятся значения параметров объекта
регулирования. |
T |
|
J RЯ |
|
Рекомендуется также рассчитать механическую |
||||
k H 2 |
||||
постоянную времени ЭП |
M |
|
3СИНТЕЗ САР
•Синтез регуляторов системы
•Синтез функциональных узлов САР
•Синтез задающих устройств (задатчика интенсивности)
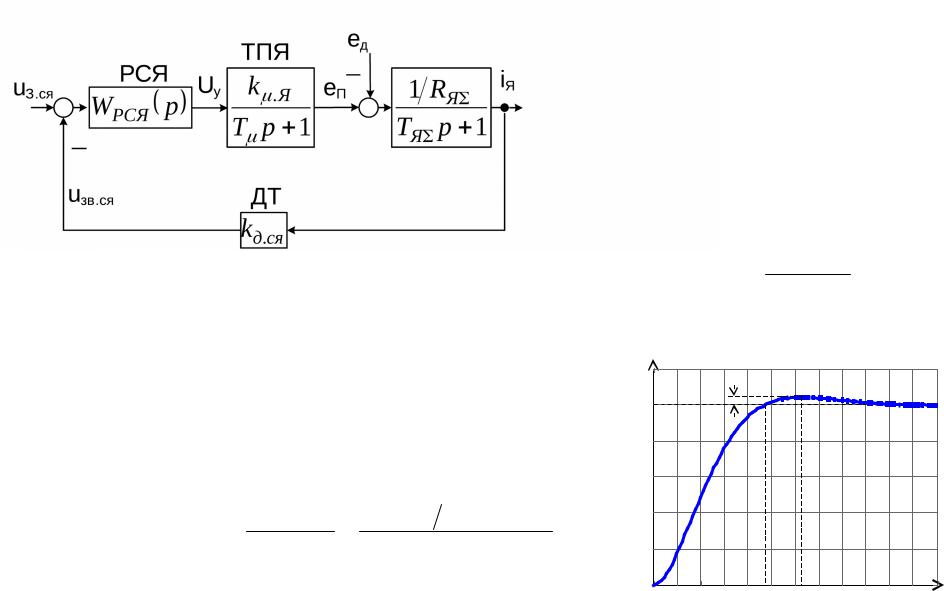
3.1 Синтез регулятора тока якоря |
|
|
|
|
|
||||||||||||
(в подсистеме регулирования скорости по цепи якоря) |
|
||||||||||||||||
1) Приводится структурная схема контура регулирования тока якоря |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
Актуальна для всех вариантов |
|
||||||||
|
|
|
|
|
|
|
|
задания, кроме 2, 7, 11, 17 |
|
|
|||||||
|
|
|
|
|
|
|
|
2) Формулируются допущения |
|
||||||||
|
|
|
|
|
|
|
|
|
при синтезе |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
3) Записывается передаточная |
|
||||||||
|
|
|
|
|
|
|
|
|
функция регулятора тока |
|
|||||||
|
|
|
|
|
|
|
|
|
якоря:W |
p |
|
RЯ |
|
TЯ p 1 |
|||
|
|
|
|
|
|
|
|
|
|
|
PСС |
|
k .Я kд.ся |
TСЯ p |
|||
4) Выбирается постоянная времени ТСЯ, с, |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||
ориентируясь на стандартную настройку, |
|
|
hKPT *= |
|
|
|
|
|
|
||||||||
например, при настройке на МО (рекомендуется): |
|
IЯ/ІЯ.уст |
|
|
|
|
|
|
|||||||||
|
|
TС.Я 2T |
|
|
|
|
|
1 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
5) Записывается передаточная функция замкнутого |
0.8 |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
||||||||||
контура тока якоря: |
|
|
|
|
|
|
|
|
0.6 |
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
KKPCЯ p |
i |
Я |
|
1 k |
д.ся |
|
0.4 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
2 |
|
|
0.2 |
|
|
|
|
|
|
|
||||
|
UЗСЯ p |
T TСЯ p |
|
TСЯ p 1 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
t/T |
|||||||
и строится переходная функция замкнутого КРСЯ |
|
00 |
|
|
|
|
|
|
|||||||||
|
2 |
4 tC |
6tm |
8 |
10 |
12 |
|||||||||||

3.2Синтез регулятора тока возбуждения
1)Приводится структурная схема контура регулирования тока возбуждения
|
|
|
|
|
|
|
|
|
|
|
Актуальна для вар-ов |
|
|
|
|
|
|
|
|
|
|
|
|
2, 3, 5-9, 11-13, 15, 17, |
|
|
|
|
|
|
|
|
|
|
|
|
18, 20, 22 |
|
|
|
|
|
|
|
|
|
|
|
|
2) Указывается на |
|
|
|
|
|
|
|
|
|
|
|
|
необходимость |
|
|
|
|
|
|
|
|
|
|
|
|
применения |
|
|
|
|
|
|
|
|
|
|
|
|
инерционного |
|
|
|
|
|
|
|
|
|
|
|
|
ДСЗ |
|
3) Записывается передаточная функция регулятора тока возбуждения: |
|
|||||||||||
|
WPCЗ p |
k |
Rзб |
|
Tзб p 1 |
|
|
|
|
|||
|
|
|
.зб |
k |
д.сз |
T p |
|
|
|
|
||
|
|
|
|
|
CЗ |
|
|
|
|
|||
4) Выбирается постоянная времени ТСЗ, с, ориентируясь iв |
Твт=10% |
|
||||||||||
на стандартную настройку, например, при |
|
|
|
|
||||||||
апериодической настройке (рекомендуется): |
i |
* |
Твт=5% |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
TTЗ 2T .зб |
|
|
|
|
в |
|
|
|
||
|
|
|
|
|
|
|
|
Твт=2% |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
5) Записывается передаточная функция замкнутого |
|
|
Твт=0 |
|
||||||||
контура тока возбуждения: |
|
|
|
|
|
|
|
|
|
|||
KKPСP p |
1 |
Tвc p 1 |
Rзб |
|
Tвc p 1 |
|
|
желаемая настройка на |
t |
|||
|
kд.сз |
Tзб p 1 |
|
|
TСЗ p T .зб p 1 1 |
|
0 |
МО, Твт=0 |
||||
|
|
|
|
|
|
|
|
|
|
|
||
и строится переходная функция замкнутого КРСЗ |
|
4,7Т в |
|
|||||||||
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
4ПРОВЕРОЧНЫЙ РАСЧЕТ СТАТИЧЕСКИХ И ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК САР
4.1Розрахункова структурна схема СКЕП
составляется структурная схема контура регулирования скорости при номинальном потоке с учетом всех возмущений)
4.2Передаточні функції системи за керуючим та обурювальним впливами
4.3Расчет и анализ переходных характеристик системы
4.4Статические характеристики системы
5РАЗРАБОТКА ПРИНЦИПИАЛЬНОЙ СХЕМЫ СУЭП
5.1Выбор ячеек датчиков измеряемых величин
ячейка датчика тока ДТ-3АИ (для ДТЯ, ДТВ) ячейка датчика напряжения ДН-2АИ
(для ДН в цепях измерения напряжения якоря и скорости)
5.2 Выбор ячеек регуляторов
ячейка регулятора тока РТ-1АИ (для РТЯ, РТВ)
ячейка регулятора скорости РС-1АИ (для РС, РЭ, РН, РП)
5.3 Выбор ячеек функциональных узлов
ячейка выделения модуля ВМ-2АИ; мнодительно-делительная ячейка МД-2АИ; ячейка операционных усилителей У12-АИ; ячейка функционального преобразователя; ячейка фильтров; ячейка резисторов.
5.4 Выбор ячеек задающих устройств
ячейка задатчика интенсивности ЗИ-2АИ, ЗИ-3АИ.