

5.2 Компаундирование синхронных генераторов (компенсаторов).
Компаундирование имеет место при смешанном (параллельно-последовательном) возбуждении и применительно к синхронным машинам может быть пояснено рис. 5.9.

Рисунок 5.9
При отсутствии регулирования напряжения, с увеличением тока нагрузки, напряжение снижается в соответствии с известной вольтамперной (нагрузочной) характеристикой. При этом величина U оказывается недопустимо большой. Для устранения этого недостатка в случае компаундирования ток, пропорциональный току нагрузки подается в трансформатор компаундирования, на вторичной обмотке которого появляется напряжение Uк.
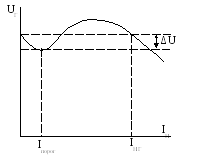
Рис.5.10
Это напряжение обусловливает выпрямленный добавочный ток (iк) в обмотке возбуждения возбудителей (ОВВ), поэтому теперь:
iВВ = iВ + iК
а напряжение на возбудителе и соответственно на генераторе увеличивается. На рис.5.10 приведена характеристика напряжения на генераторе при наличии компаундирования. При Iн < Iпорог, Uк < Uг и тока iК нет, то есть компаундирование отсутствует, поэтому напряжение на генераторе в этом диапазоне нагрузок снижается (рис. 5.10). При Iн > Iпорог появляется ток iК и характеристика поднимается, однако дальнейшее увеличение тока нагрузки приводит снова к снижению U (начинает сказываться насыщение).
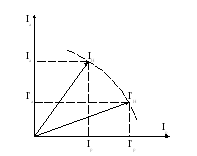
Рис.5.11
U на Г изменяется в основном из-за изменения реактивного тока нагрузки, а компаундирование ведется по полному току, поэтому если при неизменном полном токе нагрузки (Iнагр = const по рис.5.11) изменится ее cos, то это может привести, например, к увеличению реактивного тока до Iр; такое увеличение Iр вызовет уменьшение U на Г, а система компаундирования этого не чувствует, так как Iн = const и соответственно iК = const, т.е. возбуждение не меняется. Из сказанного следует, что компаундирование позволяет регулировать (поддерживать) U, однако отклонения U, хотя и меньше, но имеют место. В связи с этим схемы компаундирования дополняются корректорами U, которые как бы подрегулируют (подправляют) U.
5.3 Магнитные усилители.
В связи с тем, что последующие схемы автоматики содержат магнитные усилители, вообще, эти элементы продолжают широко использоваться в различных автоматических устройствах, рассмотрим сущность их построения. Ток нагрузки Iн протекающий по Rн (рис. 5.12) можно записать:
![]()
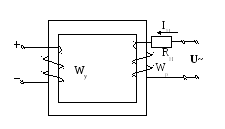
Рисунок 5.12
Активное сопротивление обмотки Wр обычно невелико и им можно пренебречь. При неизменном сопротивлении нагрузки ток в этой цепи можно менять за счет изменения индуктивного сопротивления ХWр. Изменение этого сопротивления за счет изменения числа витков или воздушного зазора в магнитопроводе связано всегда с механическими подвижными элементами, которые, в случае частой работы в системах автоматического регулирования, изнашиваются и быстро выходят из строя. В связи с тем, что ХWр = менять эту величину можно за счет изменения индуктивности , которая, как известно, пропорциональна магнитной проницаемости = f(). В свою очередь = f(В), то есть, зависит от величины магнитной индукции (рис. 5.13) и может изменяться в широком диапазоне.
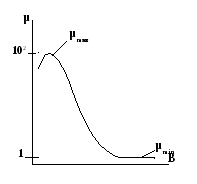
Рис.5.13
Так max для обычного электротехнического железа составляет сотни единиц, а для пермаллоя – несколько тысяч единиц. В тоже время min для насыщенного железа всегда равна единице. Это означает, что, изменяя индукцию В, индуктивность сопротивления ХWр можно изменять в сотни и тысячи раз, то есть можно в широком диапазоне изменять Iн.
Величину индукции В можно изменять за счет подмагничивания железа постоянным током. При подаче относительно небольшого тока в обмотку управления с большим числом витков можно суммарную индукцию доводить до значения насыщения. Устройство (рис.5.12) является однотактным магнитным усилителем, так как насыщение, а, следовательно, усиление имеет место только в одном полупериоде тока Iн, когда индукция В= и В суммируются.
На рис. 5.14 приведены зависимости, иллюстрирующие сущность усиления (малому изменению тока управления Iу соответствует большое изменение Iн).
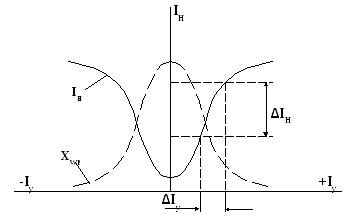
Рис.5.14
Недостатками одноконтактного МУ является относительно большой коэффициент усиления и большой уровень высших гармоник, наводимых в Wу и влияющих на источник постоянного тока, поэтому в практике большое применение имеют двухтактные МУ.
На рис.5.15 приведена схема МУ, выполненная на трехкерновом железе с обмоткой управления на среднем керне.
В этом случае в каждом полупериоде насыщается один из крайних кернов и усиление происходит в каждом полупериоде тока Iн и характеристика Iн =f(Iу) ничем (кроме крутизны) не отличается от предыдущей (на рис.5.15 – пунктирная кривая). В данном случае на среднем керне имеется обмотка обратной связи, которая включена на выпрямленный ток нагрузки. Если обмотки Wу и Wос включены согласно, то их потоки суммируются, и если при отсутствии Iу току должен был соответствовать ток Iн, то при наличии Wос имеется дополнительное подмагничивание на величину Iу, что равносильно току Iу, но этому току соответствует ток Iн. Однако, на самом деле по обмотке Wу протекает ток Iу и ему соответствует Iн, это означает, что характеристика должна пройти через точку «а».
IH=f(Iy)
+Iy
с Woc
без Woc
Рис.5.15
Если рассмотреть все точки этой ветви характеристики, то можно убедиться, что при наличии Wос вся ветвь проходит выше характеристики без Wос. В этом случае имеет место положительная обратная связь (ПОС), так как ток выхода (Iн) воздействует на вход так, что выходной сигнал увеличивается. Если поменять полярность тока Iу и провести такое же рассмотрение на левой ветви характеристики не трудно убедиться, что при наличии Wос характеристика пройдет ниже, то есть будет иметь место отрицательная обратная связь (ООС). Не трудно заметить, что наличие обратной связи у МУ как бы разворачивает характеристику Iн =f(Iу) относительно точки Iн min. Изменение числа витков Wос меняет коэффициент обратной связи и меняет наклон характеристики. Если в обмотку смещения Wсм подать постоянный ток, то она будет также создавать дополнительный поток подмагничивания.

Рис.5.16
Если в Wсм подать ток Iсм , создающий магнитный поток, встречный потоку то это будет означать, что ось Iу = 0 как бы переместилась влево (рис 5.16.) и МУ оказывается открытым при Iу = 0. Таким образом, изменяя ток Iсм, характеристику можно смещать относительно оси Iн. Магнитный усилитель с очень крутой характеристикой (большой коэффициент обратной связи) может иметь релейную (почти скачкообразную) характеристику и называется магнитным реле.
Закрытое состояние МУ (большое сопротивление Wр) соответствует разомкнутому контакту, а открытое (малое сопротивление Wр) – замкнутому. Из рисунка 5.16 можно видеть, что эти реле могут иметь нормально замкнутые (размыкающиеся) или нормально разомкнутые (размыкающиеся) контакты.
Преимуществом этих реле является отсутствие подвижных частей и контактов (как таковых), что обуславливает их высокую надежность.
5.4. Схема компаундирования генератора с электромагнитным корректором.
На рисунке 5.17 приведена схема компаундирования с односистемным электромагнитным корректором. Компаундирование выполнено через трансформатор компаундирования ТК, уровень тока первичных обмоток которого можно регулировать с помощью установочного сопротивления Rук и тем самым задавать уровень компаундирования, то есть величину тока Iн.
Корректор напряжения работает от трансформатора напряжения и содержит измерительный орган, выполненный на базе линейного и нелинейного элементов. На рисунке 5.18 приведена упрощенная схема такого измерительного органа.
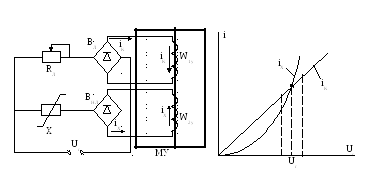
Рисунок 5.18.
Ток iк в обмотке управления W1у магнитного усилителя изменяется линейно с изменением напряжения на генераторе (Uг), а в обмотке W2у нелинейно. При W1у=W2у и iк = iх результирующее подмагничивание отсутствует, что соответствует Uг=Uгн. Если Uг отклоняется, то, как это видно из кривых на рисунке 5.18, один из токов становится больше другого, что вызывает результирующее подмагничивание и соответствующее изменение сопротивления рабочих обмоток МУ.
Величина и знак результирующего подмагничивания зависит от величины и знака отклонения напряжения от Uгн.
Линейный элемент схемы (рис.5.17) выполнен на сопротивлении Rл , выпрямителе Вл и ток от него iк протекает по обмотке управления трехфазного МУ. Нелинейный элемент содержит трансформатор ТН, выпрямитель Внл и питает обмотку 2 током iх. Трансформатор ТН работает в режиме некоторого насыщения, поэтому на его разомкнутом треугольнике существует напряжение, пропорциональное гармоникам кратным 3. При увеличении напряжения на входе ТН степень насыщения увеличивается, кривая магнитного потока еще больше искажается и напряжение на разомкнутом треугольнике нелинейно возрастает. При снижении этого напряжения напряжение выхода резко снижается. Рабочие обмотки МУ (Wр) пофазно включены в цепь выпрямителя Вк , поэтому появляющееся при отклонении напряжения, результирующее подмагничивание, изменяет их сопротивление и тем самым изменяет ток корректора iкор , который подается на дополнительную обмотку возбуждения и меняет соответствующим образом результирующее возбуждение возбудителя. В связи с тем, что основное регулирование напряжение на генераторе осуществляет элемент компаундирования (ток iк), на долю корректора остается только подрегулирование, поэтому от него требуется небольшая мощность, которую способен выдать даже трансформатор напряжения.
Обмотка 3 МУ осуществляет жесткую обратную связь (ЖОС), которая влияет на регулирование всегда, а через обмотку 4 – гибкая обратная связь (ГОС), которая влияет на регулирование только в режимах меняющегося напряжения на зажимах возбудителя.
С помощью трансформатора ТР осуществляется подпитка цепей напряжения от цепей тока, степень которой регулируется сопротивлением r. При изменении тока нагрузки меняется напряжение на вторичной обмотке ТР и он трем самым меняет напряжение на первичной обмотке ТН. Этим самым осуществляется токовая стабилизация или компенсация (в зависимости от полярности подключения) напряжений uв и uн.
5.5 Автоматическое регулирование напряжения на трансформаторах под нагрузкой.
Все современные силовые трансформаторы и автотрансформаторы оборудованы устройствами регулирования напряжения под нагрузкой (РПН), которая представляет собой переключатель отпаек витков обмотки высокого напряжения ВН с моторным приводом.
Автоматическое регулирование напряжения чаще всего ведется на понижающих трансформаторах, поэтому датчик U устройства АРНТ подключается к ТН со стороны НН 6-10 кВ (рис.5.19).
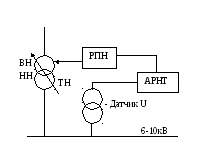
Рис.5.19
Наибольшее распространение в эксплуатации имеет устройство типа БАУРПН. В связи с громоздкостью принципиальных схем ограничимся распространением функциональной схемы АРНТ типа БАУРПН-1 (блок автоматического управления РПН), изображенном на рисунке 5.20.
Напряжение с трансформатора и напряжение пропорциональное току нагрузки от блока токовой компенсации подаются на сумматор, а результирующее напряжение поступает на измерительный орган для которого:
Uр=Uтн –Iн rсх
Это означает, что регулирование в этом случае ведется с использованием отрицательного статизма, т.е. имеет место встречное регулирование.
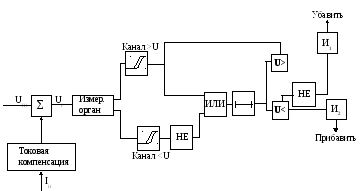
Рис.5.20
В зависимости от знака отклонения напряжения на трансформаторе срабатывает пороговый орган канала увеличения U или уменьшения U. И в том, и в другом случае через элемент или запускается элемент задержки времени. По истечении времени, достаточного для отстройки от кратковременных изменений напряжения (например,при К.З.) на оба логических элемента «И» поступают входные сигналы. Если имело увеличение напряжение на логический элемент «И» каналаU поступают два входных сигнала, поэтому срабатывает выходное реле К1, которое подает команду на РПН «Убавить напряжение». При этом через элемент НЕ снимается второй сигнал с элемента «И» канала < U, т.е. блокируется (запрещается) срабатывание реле К2. В случае снижения напряжения К1 в действие не приходит, поэтому на элемент «И» каналаU подаются оба сигнала и срабатывает только К2.
Так как витки трансформатора изменяются ступенчато при работе РПН, измерительный орган регулятора должен иметь зону нечувствительности, ширина которой должна быть больше ступени регулирования. Это означает, что при ступени регулирования, например, 2,5 % регулятор не должен приходить в действие при отклонении напряжения, меньше2,5 %.
В противном случае будет иметь место режим непрерывной работы «Вперед-назад».