

Если выполнить обмотку управления с числом витков , то
небольшими изменениями тока цепи управления можно управлять значительными изменениями тока в нагрузке. Усиление в данном случае осуществляется за счет энергии источника питания.
Основные достоинства магнитных усилителей — большие коэффициенты усиления по току и мощности, высокая надежность, легкость одновременного суммирования нескольких сигналов , высокая стабильность нуля, высокая чувствительность, большая перегрузочная способность, практически неограниченный срок службы и др. Основной недостаток — значительная инерционность.Так как принцип действия магнитного усилителя основан на связи между цепью управления и рабочей цепью через магнитный поток, а мгновенное изменение магнитного потока невозможно, то кривая выходного тока запаздывает относительно сигнала управления.
5
2. Рассчитать по паспортным данным коэффициенты усиления по току, напряжению и мощности, ток короткого замыкания, коэффициент полезного действия и постоянную времени усилителя (паспортные данные магнитного усилителя ТУМ А1-11 и ТУМ А3-11 приведены в табл.1.1).
Таблица 1.1 — Паспортные данные магнитных усилителей ТУМ А1-11 и
ТУМ А3-11
|
параметр |
ТУМ А1-11 |
ТУМ А3-11 |
||
|
RN , Ом |
105 |
33 |
||
|
Wр |
1250 |
500 |
||
|
Rp , Ом |
32.2 |
4.35 |
||
|
|
Rу , Ом |
Wу |
Rу , Ом |
Wу |
|
1Н-1К |
3.2 |
70 |
0.39 |
30 |
|
2Н-2К |
53 |
500 |
55 |
399 |
|
3Н-3К |
154 |
1477 |
190 |
1393 |
|
4Н-4К |
156 |
1300 |
168 |
1090 |
|
5Н-5К |
156 |
1300 |
168 |
1090 |
|
6Н-6К |
156 |
1300 |
125 |
1090 |
|
7Н-7К |
156 |
1300 |
125 |
1090 |
Коэффициентом усиления по току KI называется отношение изменения тока в нагрузке к вызвавшему его изменению управляющего тока. На линейном участке характеристики управления отношение токов равно отношению чисел витков управляющей и рабочей обмоток :
![]()
Коэффициент усиления по напряжению :
![]()
где Rу — сопротивление цепи управления.
Коэффициент усиления по мощности :

6
Содержание отчета
1. Краткие теоретические данные по термодатчикам.
2. Таблица экспериментально снятых точек температурных характеристик
датчиков.
3. Графики температурных характеристик, построенные по экспериментальным
данным.
4. Выводы о температурных коэффициентах термосопротивлений ( ТКС ) и по
результатам исследований.
ЛАБОРАТОРНАЯ РАБОТА 7
ИССЛЕДОВАНИЕ ТЕНЗОДАТЧИКОВ
Цель работы : приобретение практических навыков работы с тензодатчиками.
Оборудование и приборы
Тензодатчики , набор грузов , микроамперметр .
Содержание работы
1. Ознакомиться с основными типами тензодатчиков.
2. Снять характеристику тензодатчика .
Порядок выполнения работы
1. Ознакомиться с основными типами тензодатчиков.
В данной лабораторной работе под термином — ”датчик” понимается конструктивно законченный преобразователь , предназначенный для выполнения конкретной функции преобразования .
Большое распространение в качестве измерительных преобразователей получили тензорезисторы , которые делятся на три группы :
1. Проволочные тензорезисторы.
2. Фольговые тензорезисторы.
3. Полупроводниковые тензорезисторы.
Проволочные тензорезисторы. В наиболее простом случае проволочные тензорезисторы представляют собой отрезок проволоки , концы которой жестко закрепляются с помощью клея или цемента на упруго деформируемой детали . Сжатие или растяжение детали вызывает пропорциональное сжатие или растяжение проволоки , в результате изменяется электрическое сопротивление проволоки .
31
Максимальное значение термо-ЭДС не должно превышать 1В (после усиления ).
Питание включается тумблером, находящимся на термостате. До включения необходимо ручку контроля нагрева повернуть против часовой стрелки до упора .
После включения питания лампа на термостате не должна гореть, что указывает на отсутствие нагрева . Следующий шаг — балансировка усилителя . Для этого необходимо включить тумблер ”Режим” в положение ”0” и, вращая ручку ”Баланс”, добиться , чтобы вольтметр показывал ноль .
Теперь ручку контроля температуры на термостате нужно перевести в крайнее противоположное положение. При этом должна загореться лампочка — термостат начал нагреваться. Тумблер ”Режим” переключать в положение “ТП”.
Расстояние между соседними точками характеристик — 5-10 градусов . Измерения проводить до температуры отключения термостата ( 90 градусов ).
Снятые характеристики занести в таблицу 6.1 .
Показать почему в данной работе измеряемое напряжение термопары меньше паспортного значения для данной температуры.
Таблица 6.1 — Температурные характеристики термодатчиков.
|
№ п/п |
t, ° C |
E, mB |
RD1, Oм |
RD2, Oм |
RD3, Oм |
|
|
|
|
|
|
|
 Рисунок 6.4 - Схема коммутации
лабораторной установки
Рисунок 6.4 - Схема коммутации
лабораторной установки
30
Коэффициент полезного действия магнитного усилителя :

где
![]() — мощность,
потребляемая из сети переменного тока;
— мощность,
потребляемая из сети переменного тока;
![]() — сопротивление цепи тока нагрузки.
— сопротивление цепи тока нагрузки.
Напряжение питания Uc магнитного усилителя уравновешивается падением напряжения на рабочих обмотках и нагрузке. При некотором токе управления сердечник усилителя насыщается, изменение индукции переменного поля незначительно и возв0. Вследствие этого индуктивное сопротивление рабочей обмотки и ток в нагрузке приобретают наибольшее возможное значение, называемое током короткого замыкания :
![]()
При больших сигналах управления магнитный усилитель неуправляем.
Постоянная времени магнитного усилителя может быть принята равной постоянной времени цепи управления :
![]()
где Lу — индуктивность цепи управления;
у — магнитная проницаемость для постоянного магнитного потока.
Это выражение справедливо для небольших величин сигнала управления , когда переходный процесс имеет апериодический характер. При этом вместо у можно подставить максимальную относительную проницаемость max по основной кривой намагничивания материала сердечника.
3. Снять характеристики управления нереверсивного магнитного усилителя.
Характеристикой управления магнитного усилителя называется зависимость тока в нагрузке от тока управления Iнср=f(Iу) .
Вследствие симметричности основной кривой намагничивания материала сердечника относительно начала координат характеристика управления нечувствительна к знаку управляющего сигнала (рис. 1.3). Магнитный усилитель с такой характеристикой называют нереверсивным.
7
Схема для снятия характеристики управления приведена на рис.1.4. Результаты измерений представить в табл.1.2. Опыт выполнить поочередно для всех обмоток управления.

Таблица1.2— Характеристики управления нереверсивного магнитного усилителя.
|
№ |
Маркировка выводов обмоток управления |
|||||||
|
п/п |
2Н-2К |
3Н-3К |
4Н-4К |
6Н-7К |
||||
|
|
Iу, мА |
Iн, мА |
Iу, мА |
Iн, мА |
Iу, мА |
Iн, мА |
Iу, мА |
Iн, мА |
5.Рассчитать коэффициенты усиления по экспериментальным кривым и сравнить их с расчетными по паспортным данным. Расчеты следует выполнить для небольших приращений токов на линейном участке характеристики управления
(см. рис. 1.3). Результаты расчетов представить в табл. 1.3.
Таблица 1.3 — Расчет коэффициента усиления .
|
Параметр |
Маркировка выводов обмоток управления |
|||||||
|
|
2Н-2К |
3Н-3К |
4Н-4К |
6Н-6К |
||||
|
|
эксп |
паспорт |
эксп |
паспорт |
эксп |
паспорт |
эксп |
паспорт |
|
KI |
|
|
|
|
|
|
|
|
|
KU |
|
|
|
|
|
|
|
|
|
KP |
|
|
|
|
|
|
|
|
8
3. Термопара хромель-копель ( ХК ) .
4. Термодатчик.
2. Снять температурные характеристики термодатчиков .
Стенд для выполнения лабораторной работы состоит из термостата , в который помещены термодатчики и подсоединенной к нему коробки , где находятся основные органы управления и клеммы подключения к измерительным приборам. Внешний вид панели управления показан на рис.6.3 .

К выходу термопары подключен усилитель с коэффициентом усиления около 200. При разнице температур между спаями 80 градусов напряжение термопары находится в пределах 4.5 mВ, т.е. на выходе усилителя оно не
превышает 1В .
Терморезисторы подключаются к омметру через клеммы 3-4 . Измерения
проводятся в диапазоне до 1000 Ом .
Для снятия температурных характеристик с резисторных датчиков следует подключить омметр к клеммам 3-4. Для переключения измеряемых датчиков служит переключатель на лицевой панели стенда.
Для снятия характеристики термопары используется дифференциальный операционный усилитель с коэффициентом усиления около 200. Выход усилителя — клеммы 1-2. К выходу усилителя нужно подключить вольтметр.
29
( ) , а для полупроводников =-(0.03 ... 0.06 ) 1/ С .
Теоретические графики температурных характеристик выглядят как
показано на рис. 6.1 .
Датчики, использующие термо-ЭДС, состоят из термопары или нескольких
термопар, соединенных последовательно в термобатарею. Термопара состоит из двух проволок, одни концы которой спаяны или сварены (горячий спай), а другие, свободные, включаются во внешнюю цепь ( холодный спай ).
Если температура холодного спая равна нулю ( 2=0 ), а температура
горячего спая 1 , то термо-ЭДС может быть определена по формуле :
![]()
где a,b,c — постоянные коэффициенты для данной комбинации материалов
термопары.
Обычно термо-ЭДС не рассчитывают , а определяют по кривой Ef(1)
(рис. 6.2) или по специальным таблицам. Если температура холодного спая
2=0, то измеряемая термо-ЭДС E Ex равна :
E x= E 1 -E 2= f(1) - f(2) .
На рис.6.2 показано графическое определение по кривой Ef(1) значений E x , E 1 , E 2. Значения 2=ош составляет ошибку в показании термопары вследствие того , что температура холодного спая 2 не равна нулю .

В данной работе для исследования предлагаются следующие виды термодатчиков:
1. Термометр-сопротивление медный ( ТСМ ) типа ИС 567А .
-
Термистор ( полупроводниковый термодатчик ) .
28
Содержание отчета.
1. Паспорт магнитного усилителя.
2. Расчеты KI,KU,KP, ,Iн, по паспортным данным.
3. Схема исследования.
4. Таблицы 1.2 и 1.3 с результатами измерений и вычислений.
5. Графики характеристик управления.
6. Выводы по результатам исследований.
ЛАБОРАТОРНАЯ РАБОТА 2.
ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИКИ ПОЛЯРИЗОВАННОГО
МАГНИТНОГО УСИЛИТЕЛЯ
Цель работы : изучить особенности включения и характеристики управления
поляризованного магнитного усилителя.
Оборудование и приборы.
Магнитный усилитель серии ТУМ-А, миллиамперметр, регуляторы тока и напряжения.
Содержание работы.
1.Рассчитать ток обмотки смещения, необходимый для получения характеристики управления магнитного усилителя, работающего в классе А.
2.Экспериментально определить характеристики управления
поляризованного магнитного усилителя при последовательном и параллельном подключении нагрузки.
3. Рассчитать коэффициенты усиления по току , напряжению и мощности
магнитного усилителя с обмоткой смещения и без нее.
Порядок выполнения работы.
1. Собрать схему поляризованного магнитного усилителя с последовательным включением нагрузки (рис. 2.1). Поляризованным называют магнитный усилитель, в котором осуществляется дополнительное подмагничивание сердечника с помощью неизменного по величине постоянного тока, протекающего по специальной обмотке смещения.
Характеристика управления нереверсивного магнитного усилителя Iн=f(Iу)
отличается тем, что изменение полярности управляющего сигнала не влияет на изменение величины и фазы тока нагрузки. Если ввести дополнительное подмагничивание (смещение) , то можно получить такую характеристику управления, когда при перемене полярности управляющего тока изменяется величина тока в нагрузке. Смещение выполняется путем подачи постоянного тока в обмотку смещения см , которая наматывается на сердечники так же, как и обмотка управления. В реальном усилителе для обмотки смещения используется одна из обмоток управления.
В зависимости от полярности токов управления и смещения создаваемые ими напряженности либо суммируются, либо вычитаются. При суммировании полей ток в нагрузке увеличивается, а при вычитании — уменьшается. Это приводит к перемещению характеристики управления влево при положительном направлении тока в обмотке смещения и вправо — при отрицательном (рис.2.2).
9
При этом обычно подбирается такое смещение, чтобы при положительных сигналах управления ток нагрузки увеличивался от значения Iно, соответствующего Iу=0, а при отрицательных — уменьшался. Такой усилитель будет реагировать на полярность управляющего сигнала.
Недостатком поляризованного усилителя является большой ток нагрузки при Uу=0, значительно превышающий Iх.
2. Снять характеристику управления магнитного усилителя при Iсм=0 .
3. Рассчитать ток в обмотке смещение, необходимый для получения характеристики управления усилителя, работающего в классе А.
На практике используются поляризованные магнитные усилители с начальной рабочей точкой (при Iу=0) на середине линейного участка характеристики управления (характеристика 2 на рис. 2.2). В этом случае говорят, что усилитель работает в классе А.
Для получения такой характеристики
обмотку смещения необходимо запитать
током :
![]()
где Iуэ — эквивалентный ток управления, на который необходимо сдвинуть
характеристику вдоль оси абсцисс.

4. Снять характеристики управления поляризованного магнитного
усилителя с последовательным соединением нагрузки при
![]()
10
ЛАБОРАТОРНАЯ РАБОТА 6
ИССЛЕДОВАНИЕ ТЕРМОДАТЧИКОВ
Цель работы : ознакомиться с различными видами термодатчиков и
особенностями их применения , исследовать температурные
характеристики термодатчиков.
Оборудование и приборы
Термостат , термометр , милливольтметр , омметр , термодатчики.
Содержание работы
1. Ознакомится с особенностями применения различных видов термодатчиков .
2. Снять температурные характеристики термодатчиков .
Порядок выполнения работы
1. Ознакомится с особенностями применения различных видов термодатчиков .
Свойство проводников и полупроводников изменять удельное сопротивление в зависимости от температуры , которую имеет проводник (или полупроводник), используется для построения датчиков, стабилизаторов и других элементов автоматической аппаратуры .
Для металлических проводников зависимость определяется согласно
следующему выражению :
![]()
![]()
где — удельная проводимость при =0 .
Зависимость удельного сопротивления полупроводникового
термосопротивления от температуры определяется следующим выражением :
![]()
где

В - постоянная зависящая от материала термистора;Т- температура термистора (К); - удельное сопротивление при Т стремящимся к бесконечности .
Коэффициент в выражениях для удельного сопротивления называют
температурным коэффициентом сопротивления ( ТКС ). Для меди =0.004 1/ С
27
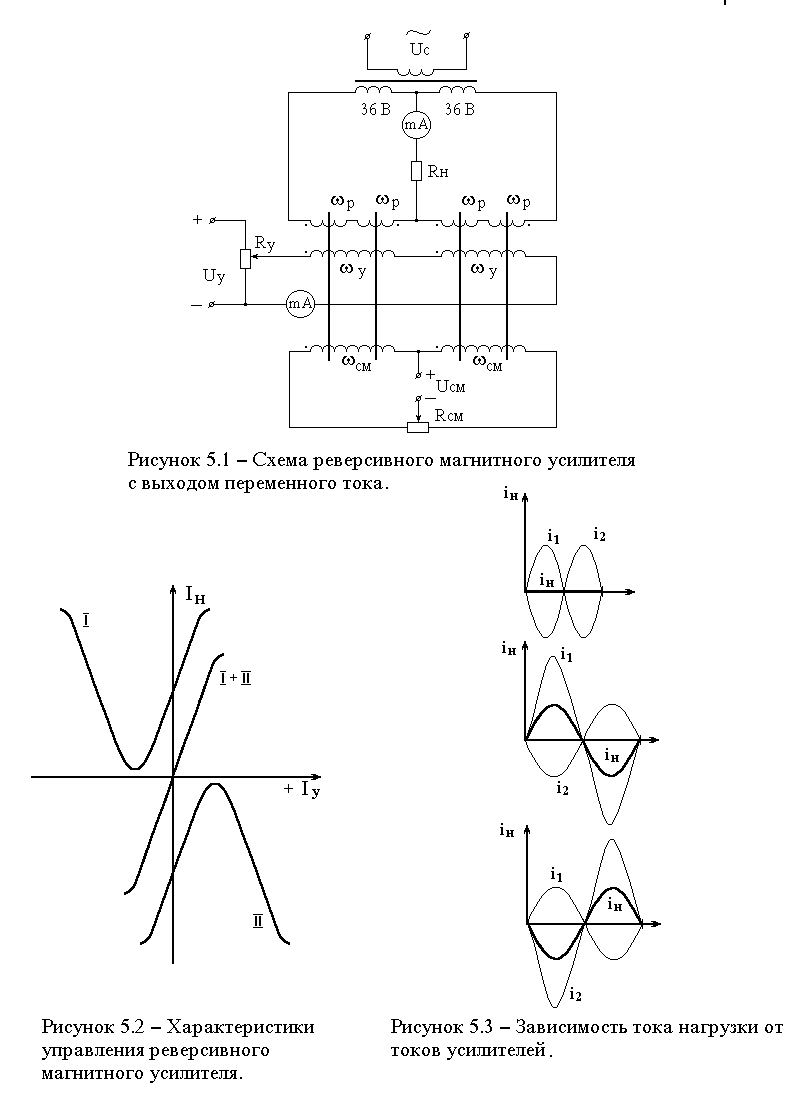
2. Собрать схему реверсивного магнитного усилителя с выходом на переменном токе (рис.5.1). С помощью балансировочного сопротивления Rсм добиться отсутствия тока в нагрузке при Iу=0.
3. Собрать схему реверсивного магнитного усилителя с выходом на постоянном токе ( рис.5.5 ). Сбалансировать схему с помощью сопротивления Rсм.
4. Рассчитать коэффициенты усиления по току, напряжению и мощности реверсивных магнитных усилителей с выходом на переменном и постоянном токах.
Результаты измерений и вычислений представить в табл.5.1 и 5.2.
Таблица 5.1 — Характеристика управления реверсивного магнитного усилителя
|
№ п/п |
С выходом переменного тока |
С выходом постоянного тока |
||
|
|
Iу,мА |
Iн,мА |
Iн,мА |
Iу,мА |
Таблица 5.2 — Расчет коэффициентов усиления реверсивного магнитного
усилителя
|
Коэффициент усиления |
С выходом переменного тока |
С выходом постоянного тока |
|
KI |
|
|
|
KU |
|
|
|
K P |
|
|
Содержание отчета
1. Схемы исследования.
2. Паспорт магнитных усилителей.
3. Заполненные таблицы 5.1 и 5.2.
4. Графики характеристик управления.
5. Выводы по работе.
26
5. Собрать схему поляризованного магнитного усилителя с параллельным подключением нагрузки ( рис 2.3 ).
При параллельном подключении нагрузки ток от источника питания распределяется между параллельными ветвями рабочей обмотки и нагрузки обратно пропорционально их сопротивлениям. При увеличении управляющего сигнала уменьшаются возвратная магнитная проницаемость сердечника возв и индуктивное сопротивление рабочей обмотки Xр . Это приводит к уменьшению сопротивления ветви рабочей обмотки и перераспределению токов: в рабочей обмотке ток возрастает, а в нагрузке — уменьшается. Следовательно, характеристика управления при параллельном подключении нагрузки (рис. 2.4 ) перевернута относительно характеристики усилителя с последовательным подключением нагрузки. Для получения характеристики усилителя с параллельным соединением нагрузки в схему требуется ввести балластное сопротивление Rб
достаточно большой величины. Включение Rб увеличивает потери и тем самым снижает КПД усилителя. Поэтому параллельное включение нагрузки на практике встречается редко.
6. Снять характеристику управления при Iсм=0.
7.Рассчитать IсмА усилителя с параллельным включением нагрузки
и снять характеристики управления при
![]()

11
8. Рассчитать коэффициенты усиления по току, напряжению и мощности по полученным характеристикам управления.
Результаты измерений и вычислений занести в табл.2.1 и 2.2.
Таблица2.1 — Характеристика управления поляризованного магнитного
усилителя.
|
№ |
Iсм=0 |
Iсм= +Iсм н |
Iсм= -Iсм н |
|||
|
п/п |
Iу,мА |
Iн,мА |
Iу,мА |
Iн,мА |
Iу,мА |
Iн,мА |
|
|
|
|
|
|
|
|
1. Последовательное включение нагрузки.
2. Параллельное включение нагрузке.
Таблица2.2 — Результаты расчета тока смещения и коэффициентов усиления.
|
Последовательное включение |
Параллельное включение |
||||||
|
Iсма,мА |
KI |
KU |
KP |
Iсма,мА |
KI |
KU |
KP |
Содержание отчета.
1. Схемы исследования.
2. Паспорт магнитного усилителя.
3. Заполненные таблицы 2.1 и 2.2.
4. Графики характеристик управления.
5. Выводы по работе.
ЛАБОРАТОРНАЯ РАБОТА 3.
ИССЛЕДОВАНИЕ МАГНИТНОГО УСИЛИТЕЛЯ
С ВНЕШНЕЙ ОБРАТНОЙ СВЯЗЬЮ.
Цель работы : изучить способы создания внешней обратной связи в магнитном
усилителе, экспериментально определить характеристики
магнитного усилителя с внешней обратной связью.
Оборудование и приборы
Магнитный усилитель серии ТУМ-А, миллиамперметры, регуляторы тока и напряжения.
Содержание работы
1. Экспериментально определить характеристики управления магнитного усилителя с внешней обратной связью по току и напряжению.
2. Рассчитать коэффициенты усиления по току, напряжению и мощности магнитного усилителя с внешней положительной и отрицательной обратной связью.
3. Графически построить характеристики управления усилителя с обратной связью.
12
нагрузке. Наиболее распространенная схема приведена на рис.5.5.

25
В схемах реверсивных магнитных усилителей с выходом постоянного тока при изменении полярности управляющего сигнала изменяется полярность тока в
24
Порядок выполнения работы
1. Собрать схему магнитного усилителя с внешней обратной связью по току (рис.3.1). Для улучшения характеристик в магнитных усилителях применяются обратные связи. Обратная связь, создаваемая с помощью специальной дополнительной обмотки, называется внешней обратной связью. Обычно в качестве обмотки обратной связи используется одна из обмоток управления.
Управление током нагрузки магнитного усилителя достигается с помощью подмагничивания сердечника постоянным полем тока управления. Такое подмагничивание частично можно осуществить непосредственно током нагрузки, если его выпрямить и ввести в обмотку обратной связи.
Выходная величина — ток нагрузки Iн . Создаваемая напряженность обратной связи Hос как бы подается обратно на вход усилителя, действуя совместно со входной величиной — током управления Iу . Если напряженность поля обратной связи Hос совпадает по направлению с напряженностью поля управления Hу, обратная связь будет положительной, в противном случае отрицательной.
Количественно обратная связь
характеризуется коэффициентом обратной
связи:
![]()
где H~ — напряженность переменного поля.
Wос,Wр — число витков обмотки обратной связи и рабочей обмотки
соответственно.

13
Рассмотренную связь называют обратной по току, так как она создается выпрямленным током нагрузки. Если обмотку обратной связи подключить через выпрямитель к нагрузке, то в ней будет протекать ток, пропорциональный падению напряжения на нагрузке, т.е. получим обратную связь по напряжению.
Положительная обратную связь способствует значительному повышению коэффициента усиления усилителя.
Основной закон магнитного усилителя при наличии обратной связи :
![]()
где ”+” — соответствует положительной обратной связи, а ”-” — отрицательной.
В случае положительной обратной связи, пренебрегая потерями в выпрямителях, т.е. считая , что ток в обмотке обратной связи IосIнср, получим коэффициент усиления по току :
![]()
где KI — коэффициент усиления по току без обратной связи;
Wу — число витков обмотки управления.
Коэффициент усиления по мощности при наличии положительной
обратной связи :
![]()
где KР — коэффициент усиления по мощности без обратной связи.
Выполняя обмотку обратной связи с числом
витков
![]()
можно получить большее усиление по току и мощности, чем без обратной связи.
Таким образом, в усилителях с положительной обратной связью за счет
тока нагрузки создается дополнительное подмагничивание, эквивалентное действию тока управления :
![]()
и для получения такого же тока Iн на выходе усилителя требуется значительно меньший ток управления.
14
При одинаковых параметрах двух половин схемы их токи равны между собой и ток нагрузки будет отсутствовать независимо от напряжения тока управления Iу. Для создания разностного тока Iу , чувствительного к полярности управляющего сигнала, необходим Iсм .
Обмотки смещения см включаются таким образом, чтобы поток смещения (начального намагничивания) в одном усилителе совпадал, а в другом был направлен навстречу потоку управления. Тогда характеристики управления усилителей смещаются в противоположных направлениях ( рис.5.2 ), результирующая характеристика реверсивного усилителя проходит через нуль и становится симметричной относительно начала координат. В этом случае при отсутствии сигнала управления ток нагрузки Iн= 0 .
При наличии сигнала управления ток одного усилителя возрастает , а второго — уменьшается, через нагрузку течет ток, совпадающий по фазе с током усилителя ( рис.5.3 ). При изменении полярности тока управления возрастает ток второго усилителя и уменьшается ток первого, ток в нагрузке совпадает по фазе с током второго усилителя, т.е. изменяет фазу на 180°.
Для повышения коэффициента усиления в реверсивных магнитных усилителях используется обратная связь. При этом обмотки смещения могут отсутствовать, а эффект смещения достигается за счет обратной связи. На рис.5.4 показана схема реверсивного магнитного усилителя, состоящего из двух нереверсивных усилителей с самонасыщением.
По рабочим обмоткам усилителей протекает однополупериодный ток, который содержит переменную и постоянную составляющие. Постоянная составляющая этого тока создает магнитное поле обратной связи. Поле, создаваемое обмоткой управления в одном усилителе, совпадает по направлению с полем обратной связи, а в другом — направлено встречно. Поэтому ток на выходе второго уменьшается, а на выходе первого — растет. Через нагрузку при этом проходит переменный ток , равный разности токов усилителей.
Как видно из рис.5.2
, характеристика
управления реверсивного магнитного
усилителя выгодно отличается от
характеристики нереверсивного.
Поэтому реверсивные схемы нередко
применяют для повышения линейности
характеристики и снижения тока холостого
хода даже в тех случаях,
когда не требуется изменять фазу или
полярность выходного напряжения.Балластные
сопротивления Rб вводятся для
уменьшения шунтирующего влияния диодного
моста относительно нагрузки .
Если Rб не включать,
то при малом сопротивлении диодов
выпрямитель полностью шунтирует
нагрузку.
Оптимальное значение балластного
сопротивления,
при котором в нагрузку поступает
максимальная мощность ,
![]() . Несмотря на
низкий КПД, такие
усилители обеспечивают достаточно
высокий коэффициент усиления и отличаются
низким порогом чувствительности ,
что позволяет применять их в качестве
маломощных высокочувствительных
усилителей для автоматического контроля
и управления.
. Несмотря на
низкий КПД, такие
усилители обеспечивают достаточно
высокий коэффициент усиления и отличаются
низким порогом чувствительности ,
что позволяет применять их в качестве
маломощных высокочувствительных
усилителей для автоматического контроля
и управления.
23
Содержание отчета
1. Схема исследования.
2. Паспорт магнитного усилителя.
3. Заполненные таблицы 4.1 и 4.2.
4. Графики характеристики управления.
5. Выводы по работе.
ЛАБОРАТОРНАЯ РАБОТА 5
РЕВЕРСИВНЫЕ МАГНИТНЫЕ УСИЛИТЕЛИ
Цель работы : изучить принцип работы и определение основных характеристик
реверсивного магнитного усилителя с выходом на постоянном и
переменном токах.
Оборудование и приборы
Магнитный усилитель серии ТУМ-А, миллиамперметры, вольтметр, регуляторы тока и напряжения.
Содержание работы
1. Изучить принцип работы реверсивных магнитных усилителей.
2. Снять характеристику управления реверсивного усилителя с выходом на переменном токе.
3. Снять характеристику управления реверсивного усилителя с выходом на постоянном токе.
4. Рассчитать коэффициенты усиления.
Порядок выполнения работы
1. Изучить принцип работы реверсивных магнитных усилителей.
Нереверсивные магнитные усилители нечувствительны к полярности входного сигнала, а при введении смещения имеют большой ток холостого хода, уменьшающий коэффициент усиления и увеличивающий потери в усилителе.
Магнитные усилители, чувствительные к полярности управляющего сигнала, называются реверсивными. Реверсивный усилитель можно получить, соединив два одинаковых нереверсивных усилителя так, что бы они действовали встречно на общую нагрузку с управлением от одного общего сигнала.
Оба нереверсивных усилителя должны иметь одинаковые магнитные и электрические параметры и соответственно одинаковые характеристки управления. Наибольшее распространение на практике получили дифференциальные схемы реверсивных магнитных усилителей. В схеме с выходом переменного тока (рис.5.1) при изменении полярности управляющего сигнала фаза тока нагрузки изменяется на 180°. Нагрузка включена между средними точками вторичной обмотки транс-форматора и рабочих обмоток усилителей. Напряжения, подаваемые на каждый нереверсивный усилитель, находятся в противофазе, поэтому сдвиг между токами усилителей I1 и I2 близок к 180° и ток нагрузки равен алгебраической разности токов усилителей:
Iн= I1- I2
22
2.Экспериментально получить характеристики управления магнитного усилителя без обратной связи, с положительной и отрицательной обратной связью по току.
3. Собрать схему усилителя с обратной связью по напряжению и экспериментально получить его характеристику управления.
4. Рассчитать коэффициенты усиления по току , напряжению и мощности магнитного усилителя при наличии внешней положительной и отрицательной обратных связей и сравнить их с соответствующими коэффициентами без обратной связи.
5. Построить характеристику управления магнитного усилителя с положительной обратной связью графическим способом.
Построение можно выполнить следующим способом. На рис.3.2 показана характеристика управления усилителя без обратной связи. В той же координатной системе при равных масштабах по осям проводится под углом прямая,
![]()
Линия ОС называется линией обратной связи.
Точка пересечения характеристики управления усилителя без обратной связи с линией обратной связи (точка М) определяет ток холостого хода усилителя с обратной связью. Для построения всей кривой необходимо для каждого значения Iн определить требуемое значение тока управления Iу, для чего брать разность абсцисс характеристики управления и линии обратной связи ( например, отрезки аб и бв для I).
Построение можно выполнить другим способом. Из ряда точек характеристики управления усилителя без обратной связи проводятся прямые, параллельные линии обратной связи. Из точки пересечения восстанавливается перпендикуляр, на который сносится ордината точки пересечения этой прямой с исходной характеристикой (построение для точки а показано пунктиром и стрелками).
Когда число витков Wос больше, чем Wр , коэффициент Kос больше единицы и линия обратной связи проходит под углом >45°. Характеристика ”вход-выход” усилителя в этом случае принимает релейный (петлеобразный) характер. Магнитный усилитель работает как бесконтактное реле.
15

Результаты измерений и вычислений занести в табл. 3.1 и 3.2.
Таблица 3.1 — Характеристика управления магнитного усилителя с обратной
связью.
|
№ |
ПОС по току |
ООС по току |
ПОС по напряжению |
|||
|
п/п |
Iу,мА |
Iн,мА |
Iу,мА |
Iн,мА |
Iу,мА |
Iн,мА |
Таблица 3.2 — Коэффициент усиления.
|
ПОС по току |
ООС по току |
ПОС по напряжению |
||||||
|
KI |
KU |
KP |
KI |
KU |
KP |
KI |
KU |
KP |
Содержание отчета
1. Схемы исследования.
2. Заполненные таблицы 3.1 и 3.2.
3. Заполненные таблицы использовать для построения графика характеристики
управления усилителя с положительной обратной связью по току.
4. Паспорт магнитного усилителя.
5. Графики экспериментальных характеристик управления.
16
т.е. магнитный усилитель с самонасыщением работает на усилитель без обратной связи. Так как коэффициент усиления при Iу>Iу2 значительно ниже, то усилитель с самонасыщением используют при токах управления Iу1<Iу<Iу2.
При Iу<Iу1 и смене полярности тока управления размагничивание сердечников незначительно (B) , оба сердечника практически насыщены весь период и напряжение на нагрузке наибольшее. В этом режиме усилитель неуправляем.
Вид характеристики управления показан на рис.4.3. Для получения характеристики нормального вида применяют смещение. Необходимый ток в обмотке смещения см находим из условия :
![]()
где Iуэ — эквивалентный ток обмотки управления, необходимый для
перемещения характеристики вдоль оси абсцисс.
2. Собрать схему магнитного усилителя с самонасыщением (рис.4.1) и снять его характеристику управления. Обмотка смещения при этом должна быть отключена.
3. рассчитать ток смещения , необходимый для получения минимального тока холостого хода усилителя.
4. Ввести смещение в схему усилителя и снять характеристику управления при вычисленном значении Iсм .
5. Рассчитать коэффициенты усиления по току, напряжению и мощности, а так же постоянную времени усилителя с самонасыщением :
![]()
Расчеты выполнить для обоих участков характеристики управления.
Результаты измерений и вычислений представить в табл. 4.1 и 4.2.
Таблица 4.1 — Характеристика управления магнитного усилителя с
самонасыщением.
|
Без смещения |
Iсм=0 |
||
|
Iу,мА |
Iн,мА |
Iу,мА |
Iн,мА |
Таблица 4.2 — Расчет коэффициентов усиления и постоянной времени.
|
Участок с обратной связью |
Участок без обратной связи |
||||||
|
KI |
KU |
KP |
|
KI |
KU |
KP |
|
21

При некотором сигнале Iу=Iу2 изменение индукции B=2Bs и магнитное состояние сердечников изменяется по предельной петле гистерезиса. Ток нагрузки при этом минимальный ( режим холостого хода ). При токах управления Iу>Iу2 режим работы схемы принципиально меняется . В управляющий полупериод сердечник размагничивается до глубокого насыщения -Bs , а в рабочий полупериод перемагничивание происходит при напряженности рабочей обмотки H~ ,превышающей напряженность управления Hу на величину коэрцитивной силы Hс , но состояния +Bs не достигается.
На этом участке справедливо уравнение :
![]()
и ток нагрузки :
![]()
где l — средняя длина силовой линии.
При достаточно больших токах в обмотке управления уHу>>Hc и
![]() ,
,
20
ЛАБОРАТОРНАЯ РАБОТА 4
МАГНИТНЫЙ УСИЛИТЕЛЬ С САМОНАСЫЩЕНИЕМ
Цель работы : изучить принцип работы и экспериментально определить
основные характеристики магнитных усилителей с
самонасыщением.
Оборудование и приборы
Магнитный усилитель серии ТУМ-А, миллиамперметры, регуляторы тока и напряжения.
Содержание работы
1. Изучить принцип работы магнитного усилителя с самонасыщением.
2. Экспериментально определить характеристики управления.
3. Рассчитать ток смещения, необходимый для получения минимального значения тока холостого хода.
4. Экспериментально определить характеристики управления при введении смещения.
5. Рассчитать коэффициенты усиления и постоянной времени усилителя с самонасыщением.
Порядок выполнения работы
1. Изучить принцип работы магнитного усилителя с самонасыщением.
В магнитных усилителях с самонасыщением обратная связь осуществляется внутренним образом за счет подмагничивания постоянной составляющей тока рабочих обмоток. Для создания постоянной составляющей тока в рабочую цепь включаются диоды (рис.4.1). Включение диодов делит работу каждого сердечника на два полупериода — рабочий и управляющий. В рабочий полупериод диод открыт и по рабочей обмотке течет ток , сердечник намагничивается от исходного состояния, определяемого напряженностью поля управления , до состояния, определяемого напряжением питания. При этом напряженности, создаваемые токами управления Hу и H~ рабочей обмотки , должны быть направлены встречно. В управляющий полупериод диод закрыт, и сердечник под действием напряженности управления размагничивается до исходного состояния.
Таким образом, в рабочий полупериод ток в рабочей обмотке создает напряженность H~ , которая стремится намагнитить сердечник, а в управляющий полупериод Hу,создаваемая током управления Iу , стремится размагнитить его.
Ток, протекающий в рабочей обмотке в рабочий полупериод, имеет переменную и постоянную составляющие.
17
Переменная составляющая тока создает напряженность переменного поля H~ , а постоянная составляющая — напряженность поля подмагничивания, выполняющего роль напряженности поля обратной связи Hос в усилителях с внешней обратной связью.

В схеме рис. 4.1 диоды включены так, что в положительный полупериод питающего напряжения ток протекает по рабочей обмотке одного сердечника (во втором в это время — управляющий полупериод ), а в отрицательный по рабочей обмотке другого. При этом напряженности H~ и Hос обоих сердечников направлены в одну и ту же сторону относительно Hу, а в нагрузке течет переменный ток Iу .
Падение напряжения по нагрузке определяется разностью напряжений сети Uс и рабочей цепи Uр :
![]()
где р — число витков рабочей обмотки;
S — сечение сердечника ;
![]() — скорость изменения индукции при
намагничивании сердечника;
— скорость изменения индукции при
намагничивании сердечника;
RР — активное сопротивление рабочей цепи, включающей рабочую обмотку и вентиль.
18
Пока сердечник ненасыщен, падение напряжения iрRр мало, напряжение сети почти полностью уравновешивается противо-ЭДС :
![]()
В некоторый момент времени ts сердечник насыщается, изменение индукции прекращается и напряжение сети почти полностью падает на нагрузке
![]()
где
![]() — КПД усилителя.
— КПД усилителя.
Среднее значение напряжения на нагрузке :
![]()
где Ucср — среднее значение напряжения питания;
f — частота сети;
![]() —
изменение индукции в рабочий полупериод.
—
изменение индукции в рабочий полупериод.
Среднее значение тока нагрузки :
![]()
Чем больше сигнал управления,
тем больше степень размагничивания
сердечников в управляющий полупериод
(![]() )
и тем позже наступает насыщение в
рабочий полупериод.
Это приводит к уменьшению среднего
значения (постоянной составляющей) тока
и напряжения на нагрузке.
)
и тем позже наступает насыщение в
рабочий полупериод.
Это приводит к уменьшению среднего
значения (постоянной составляющей) тока
и напряжения на нагрузке.
Характер напряжения на нагрузке для разных значений тока управления показан на рис.4.2.
Таким образом,
в интервале токов управления Iу1<Iу<Iу2
( рис.4.3
) увеличение Iу приводит к увеличению
![]() и
уменьшению Uнср и Iнср .
На этом участке изменение индукции
определяет изменение напряжение на
нагрузке Uнср ,
а ток зависит от Rн .
и
уменьшению Uнср и Iнср .
На этом участке изменение индукции
определяет изменение напряжение на
нагрузке Uнср ,
а ток зависит от Rн .
19
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ
ДОНЕЦКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ