

suep_metod_sem2 / suep_metod_sem2 / 6 - СУЭП на основе СД
.pdfРаздел 6. СУЭП на основе CД
6.2. Основные принципы формирования управляющих воздействий в СУЭП на основе традиционного СД
Совместное решение уравнений (4)
– (6), (15) и (16) с учетом векторной диаграммы позволяет установить законы формирования токов id, iq, if, и других координат, обеспечивающие получение на валу двигателя требуемого момента M при соблюдении условий 1 и 2.
Раздел 6. СУЭП на основе CД
6.3. Синхронный частотно-регулируемый электропривод на основе НПЧ
Одной из основных разновидностей частотно-регулируемого синхронного электропривода является система НПЧ-СД. Она перспективна при создании безредукторных тихоходных электроприводов металлургического оборудования отличающихся повышенными требованиями к быстродействию, перегрузочной способности и качеству регулирования скорости, а также для приводов размольных (дезинтегрирующих) агрегатов повышенной производительности горнорудной, цементной и химической промышленности.
Это имеет место в силу преимуществ СД перед ДПТ, среди которых:
•отсутствие ограничения на мощность;
•высокая перегрузочная способность и надежность;
•улучшенные динамические показатели;
•меньшая стоимость;
•несколько большие к.п.д. и cos .
Однако для питания от НПЧ требуется специальные низкочастотные СД, рассчитанные на работу при частотах 10 – 12 Гц.
Раздел 6. СУЭП на основе CД
6.3. Синхронный частотно-регулируемый электропривод на основе НПЧ
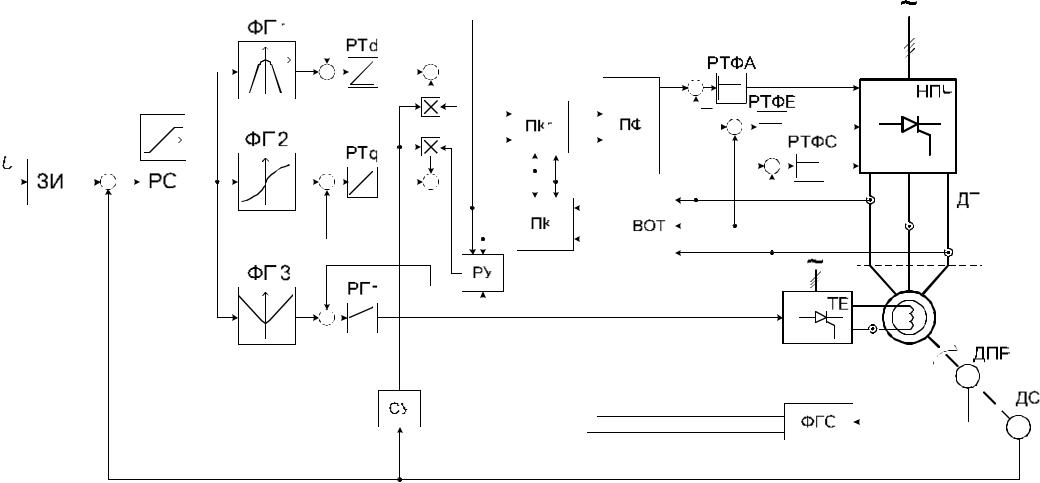
Функциональная схема САР Функциональная схема одного из вариантов САР скорости СД
|
|
|
|
i** |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
i*A |
|
|
|
u*A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
|
* |
|
* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
id |
i |
|
* |
|
|
|
* |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
i |
* |
i |
* |
|
iB |
|
uB |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
i* |
|
u* |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
iq** |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
* |
|
M * |
|
|
|
|
|
|
|
|
|
|
|
C |
C |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
iA |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
d |
|
id |
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
iB |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
iq |
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
f |
|
|
|
iC |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
*f |
|
|
|
|
|
|
|
|
|
u*f |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
i f |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin R |
|
|
|
|
|
|
|
R |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos R
Ослабление поля в данной системе не предусматривается.
Раздел 6. СУЭП на основе CД
6.3. Синхронный частотно-регулируемый электропривод на основе НПЧ
Функциональная схема САР
Ввиду нелинейности свойств СД и НПЧ регулирование тока статора выполняется в двухконтурной системе с подчиненным регулированием.
Внутренние контуры регулирования фазных токов (с П-регуляторами РТФ) обеспечивают линеаризацию характеристик НПЧ.
Формирование сигналов задания:
i* |
i* |
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
||
A |
|
|
|
|
|
|
|
|
|
|
|
1 i* |
|
3 i* |
|
|
|||
i* |
|
|
; |
(17) |
|||||
B |
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
i* |
|
1 |
i* |
|
3 |
i* . |
|
|
|
|
|
|
|
||||||
C |
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
i* i*
id* cos R
id* sin R
i* sin |
R |
; |
|
q |
|
(18) |
|
i* cos |
|
|
|
|
. |
|
|
q |
R |
|
|
Гармонические сигналы, необходимые для преобразования (18), формируются формирователем ФГС в функции измеряемого датчиком положения ротора ДПР электрического углового положения ротора R
Раздел 6. СУЭП на основе CД
6.3. Синхронный частотно-регулируемый электропривод на основе НПЧ
Функциональная схема САР
Сигналы задания во вращающейся системе координат d, q формируются внешними регуляторами составляющих токов РТd и РТq, на выходы которых подаются также сигналы коррекции с выходов блоков перемножения, обеспечивающие компенсацию внутренних ЭДС вращения двигателя.
Внешние контуры регулирования (в системе координат ротора, с регуляторами РТ) обеспечивают требуемое качество регулирования составляющих тока статора.
По цепи возбуждения организуется контур регулирования потокосцепления (или тока) обмотки возбуждения с ПИ-регулятором, воздействующим на тиристорный преобразователь ТПВ.
Вычисление потокосцеплений, вводимых в регулирующую часть САР, выполняется решающим устройством РУ в соответствии с уравнениями (4) –
(6).
Задания |
id** |
iq** |
*f |
формируются с помощью нелинейных блоков ФП1, ФП2, ФП3 в функции сигнала задания на момент, формируемого регулятором скорости РС.

Раздел 6. СУЭП на основе CД
6.3. Синхронный частотно-регулируемый электропривод на основе НПЧ
Функциональная схема САР
Фактические значения ортогональных составляющих тока статора id iq
формируются путем обратных координатных преобразований: сначала вычислителем ВОТ определяются значения составляющих
i |
3 |
iA |
|
1 |
iB |
|
1 |
|
|
|
||||
2 |
3 |
3 |
iC ; |
(19) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
1 i |
|
1 |
|
|
|
|
|
|
|
||
i |
|
|
B |
|
i |
|
, |
|
|
|||||
|
|
|
3 |
|
3 |
C |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
затем (в преобразователе ПК2) вычисляются
i |
d |
i |
cos i |
|
sin ; |
|
|
||
|
|
|
|
|
|
|
(20) |
||
i |
|
i |
|
sin i |
|
|
|
||
q |
|
|
cos . |
|
|||||
|
|
|
|
|
|
|
|||
Блоки нелинейности ФП1, ФП2, ФП3, линеаризуют контур регулирования скорости (регулятор РС) за счет компенсации общей нелинейности многомерного контура регулирования момента.

Раздел 6. СУЭП на основе CД
6.3. Синхронный частотно-регулируемый электропривод на основе НПЧ
Настройка системы
Начинается с настройки внутренних контуров регулирования фазных токов с П- регуляторами.
Основная особенность – контуры регулирования фазных токов статора iA, iB, iC принимаются симметричными (одинаковыми). В то же время, с учетом несимметрии СД как объекта управления, очевидно, что полная компенсация постоянных времени Td , Tq в общем случае оказывается невозможной.
Применяют компромиссный вариант настройки на среднюю постоянную времени
TS.cp Td Tq  2
2
из условий «приближенного» модульного оптимума. Тогда коэффициенты усиления РТФ принимают равными:
WPTФ p kPTФ |
k |
TS.cp RS |
||
|
μ |
k |
T |
|
|
|
|
д.т T |
|
где k – коэффициент передачи НПЧ;
kд.т – коэффициент передачи датчика фазного тока;
TT – постоянная времени интегрирования разомкнутого контура регулирования фазного тока, при указанной настройке принимается равной
TT 2T
Раздел 6. СУЭП на основе CД
6.3. Синхронный частотно-регулируемый электропривод на основе НПЧ
Настройка системы
При настройке внешних контуров регулирования фазных токов три внутренних синтезированных КРТФ можно представить двумя эквивалентными по составляющим по осям d и q с передаточными функциями:
KPT d p |
ki kд.т |
KPT q p |
ki kд.т |
|
kdTT p 1 |
|
kqTT p 1 |
где введены коэффициенты
ki |
TS.cp |
kd |
Td T |
kq |
Tq T |
|
TS.cp TT |
|
TS.cp TT |
|
TS.cp TT |
Внешние контуры составляющих токов с И-регуляторами компенсируют статическую ошибку внутренних контуров. Передаточные функции РТd и РТq принимают равными
WPTd p |
kд.т |
|
WPTq p |
kд.т |
kikd kд.тTT p |
|
kikqkд.тTT p |
||
|
|
|
||
|
|
|
|
|
где kд.т – коэффициент передачи датчика тока с учетом координатных преобразований ВОТ и ПК2.
При настройке замкнутых контуров тока на МО
TT 2TT

Раздел 6. СУЭП на основе CД
6.3. Синхронный частотно-регулируемый электропривод на основе НПЧ
Настройка системы
Передаточная функция ПИ-регулятора потокосцепления обмотки возбуждения |
||||
принимается равной |
|
|
|
|
WPПf p |
Tf p 1 |
|
||
|
|
|
||
|
|
Tf k f kд.nTП p |
|
|
|
|
|
|
|
где Tf Lf R f – постоянная времени обмотки |
возбуждения СД; |
|||
kμf |
– коэффициент передачи ТПВ; |
|||
kд.n |
– коэффициент передачи датчика потока (датчика тока возбуждения и |
|||
|
масштабного коэффициента РУ); |
|||
TП – постоянная времени интегрирования разомкнутого контура регулирования потока, при настройке на МО принимается равной TП 2Tμf
При настройке контура скорости при условии компенсации перекрестных обратных связей СД замкнутый контур момента достаточно точно может быть аппроксимирован передаточной функцией:
KMKM p |
kM |
где kM M * M H |
TT p 1 |
|
Тогда коэффициент усиления регулятора скорости может быть принят равным
kPC kM kJд.сTC
где при настройке на МО TC 2TT
Раздел 6. СУЭП на основе CД
6.3. Синхронный частотно-регулируемый электропривод на основе НПЧ
Рассмотренная структура регулирующей части СУЭП является наиболее общей. В ряде случаев она может быть упрощена:
1)Возможна замена обратной связи по потоку возбуждения на связь по току возбуждения с соответствующим выбором зависимости ФП3. Такая система может быть отнесена к классу частотно-токовых систем регулирования скорости. По сравнению с исходным вариантом следует ожидать некоторое
снижение качества регулирования потокосцепления f, следовательно, и момента СД.
2)Регулирование тока может быть выполнено исключительно в фазных координатах. Для улучшения динамики применяют компенсацию противо-ЭДС по схеме, вытекающей из математического описания электромагнитных контуров в фазных координатах. Но такому способу регулирования тока будет присуще наличие статической ошибки регулирования тока, что влечет за собой и снижение точности регулирования скорости.