

Дискретная пневматика_Осн.Мехатр
.pdfработы основан на настройке дросселя 1 на необходимую величину. При этом время наполнения камеры 2 воздухом будет различно. Как только камера наполнится до давления настройки пружины, распределительный клапан 3 переключится.
2 |
3 |
||
|
|
|
|
|
|
|
|
|
|
|
|
1
Рис. 1.12. Нормально закрытое реле времени: 1 – регулируемый дроссель; 2 – воздушная камера; 3 – 3/2 распределительный клапан
- датчики контроля положения (конечные выключатели). С помощью таких датчиков можно контролировать, к примеру, крайние положения поршня цилиндра (рис. 1.13). Как правило, для датчиков положения используются распределительные клапаны с роликом или толкателем.
|
|
|
2 |
3 |
|||
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1
Рис. 1.13. Пример применения датчиков контроля положения: 1 – исполнительное устройство; 2, 3 - датчики контроля положения
- пневматическая кнопка. Предназначена для пуска в работу всей системы или отдельных, входящих в общую схему, блоков. Кнопка
аб
Рис. 1.14. Условное обозначение пневматической кнопки: а – без фиксатора; б – с фиксатором
10

представляет собой, как правило, пневматический моностабильный 3/2 или 4/5 клапан с ручным управлением (рис. 1.14). Кнопки могут быть с фиксатором (рис. 1.14.б), например, для многократного отрабатывания системой заданного цикла, или без фиксатора (рис. 1.14.а), для единичного цикла.
- пневматическая лампочка. Может быть использована в качестве индикатора выполнения (невыполнения) той или команды. К примеру, при достижении штоком цилиндра своего крайнего положения лампочка «загорится» зеленым цветом (рис. 1.15).
Рис. 1.15. Схематическое обозначение пневмолампочек
Маркировка и правила подключения устройств
При работе с пневматическими устройствами часто возникают затруднения, связанные с неправильным подключением питания, управляющих и выходных сигналов. Чтобы этого избежать, многие фирмы наносят на аппаратуру условное обозначение элемента вместе с маркировкой каждого входа (выхода) (рис. 1.16). Так как лабораторные работы по предмету «Дискретные системы управления» выполняются на базе пневматического оборудования немецкой фирмы FESTO, рассмотрим подробнее маркировку этих устройств.
В(4) А(2)
11 |
|
12 |
|
Рис. 1.16. Маркировка 5/2 распределительного клапана
Т(3) Т(3)
Р(1)
1(Р) – к этому каналу подключается питание от компрессора или магистральной линии
2(А) и 4 (В) – распределительные линии, подводятся непосредственно к исполнительному устройству (полостям пневмоцилиндра, к пневмоповротнику,
кпневмозахвату и т.д.).
3(Т) и 5 (Т) – линии выхлопа сжатого воздуха в атмосферу.
11 (Y) и 12 (Z) – управляющие каналы, сюда подводятся сигналы управления данным пневмораспределителем.
Для облегчения задачи, предотвращения появления многих ошибок и просто экономии времени предлагаем систематизированный подход к последовательности подключения устройств при построении пневмосхем. Подчеркнем, что такое решение не является единственным исключающим правилом подключения элементов системы, а просто приводится как один из примеров многочисленных вариантов сборки схем.
Сборка схемы выполняется в 4 шага.
11

1. Подключение питания (1 или Р) ко всем элементам, использованным для построения схемы и требующих для нормальной работы дополнительный подвод сжатого воздуха (рис. 1.17).
Рис. 1.17. Элементы схемы, требующие подключения питания
2. Если в пневматической схеме исполнительными устройствами являются цилиндры, моторы и другие устройства, то вторым шагом после подключения питания будет подключение всех исполнительных устройств системы к соответствующим распределительным клапанам (рис. 1.18), а также подключение остальных устройств исполнительного уровня (дроссели, клапаны быстрого сброса, редукционные клапаны).
Рис. 1.18. Подключение исполнительных устройств
12
3. Построение схем для команд управления, отвечающих за последовательность работы устройств в системе (на базе логических уравнений для каждого функционального модуля) (рис. 1.19).
Рис. 1.19. Подвод сигнала команды к управляющему устройству (выделен)
4. Подключение к информационным устройствам (например, к
датчикам контроля положения) индикаторных пневмолампочек и средств контроля работы цилиндров, перевод устройств в исходное положение, проверка правильности подключения датчиков контроля, проверка последовательности выполнения логических команд, настройка параметров устройств (реле давления, реле времени, дроссели и др.).
Рис. 1.20. Подключение устройств индикации отработки команд
13

На что следует обратить внимание.
¾При подводе питания к элементам логики следить, чтобы к выходу не были подключены входные управляющие сигналы (рис. 1.21). Тоже самое касается датчиков контроля положения, клапанов.
|
|
|
|
X1*X2 |
|
|
|
|
|
|
|
X1 |
|
|||||||
X1 |
|
|
|
|
|
|
X2 |
|
X2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
б |
Рис. 1.21. Подключение питания к аппаратам: а – правильное подключение; б - неправильное
¾Не подводить питание в управляющие входы распределительных клапанов. В этом случае распределительный клапан сработает один единственный раз.
¾Если распределительный клапан моностабильный, необходимо учесть, что управляющий сигнал должен присутствовать до тех пор, пока он нужен. Иначе, как только сигнал пропадет, под действием пружины клапан передвинется в начальное положение и цикл работы нарушится.
¾Не забывать, что в любой системе должна присутствовать кнопка «Пуск». Сигнал от кнопки является сомножителем в уравнении команд устройства, срабатывающего первым согласно Вашей циклограмме.
¾Прежде чем проверять работоспособность собранной схемы, убедитесь, что все каналы устройств подключены.
Контрольные вопросы по работе
1.Назовите основные уровни распределения устройств, входящих в состав пневмосхемы (рис.1.1). Приведите примеры устройств каждого уровня.
2.Чем отличается бистабильный распределительный клапан от моностабильного? Приведите примеры таких устройств на рис.1.1.
3.Можно ли в качестве элемента памяти использовать моностабильный распределительный клапан? Ответ обоснуйте.
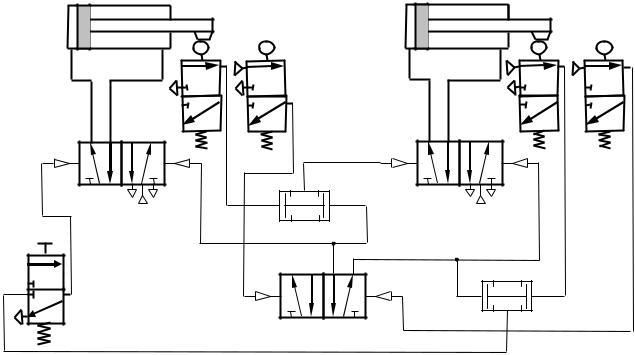
4.Правильно ли подключены устройства в схеме (см. рис. 1.22)?
14
5.Какую функцию выполняет реле времени? Нарисуйте условное обозначение реле времени.
6.С помощью моностабильных клапанов составьте схему для уравнения:
Y1 = (Х1+Х2*Х3)*НЕХ4
7.Нанесите маркировку для всех элементов пневмосхемы (см. рис. 1.22).
8.Исправить схему на рис. 1.22 и собрать ее на стенде.
Рис. 1.22. Пример пневматической схемы для поиска ошибок
15

Лабораторная работа №2
Функциональные модули систем пневмоавтоматики
Цель работы: Изучение состава, принципа работы и правил построения функциональных модулей. Получение навыков создания пневмосхем с помощью функциональных модулей.
Как было рассмотрено ранее (см. лаб. работу №1), пневматические схемы состоят из множества различных устройств. Однако отдельно рассматривать каждый агрегат возможно лишь в небольших схемах (состоящих из 1-2 исполнительных устройств). Как же быть, когда система состоит из 10-15, а может и более исполнительных устройств? В этом случае удобно разбить всю схему на отдельные системные модули, выполняющие каждый свою определенную функцию (рис. 2.1).
Yi |
|
|
|
|
|
|
|
|
|
|
|
Xi |
|||||
|
|
|
|
Управляющее |
|
|
|
Исполнительное |
|
|
|
Датчик |
|
|
|
|
|
Y |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
состояния (ДС) |
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
устройство (УУ) |
|
|
устройство (ИУ) |
|
|
|
Xi |
||||||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ФУНКЦИОНАЛЬНЫЙ МОДУЛЬ
Рис. 2.1 Схема функционального модуля на базе исполнительного устройства
Более подробно состав и создание функционального модуля рассмотрим на примере (рис. 2.2). В роли исполнительного устройства в данном случае выступает пневматический цилиндр двухстороннего действия, управляемый пневматическим 5/2 распределительным клапаном. Подводим к клапану сжатый воздух. Выходные каналы соединяем с полостями цилиндра таким образом, чтобы при отсутствии управляющих команд исполнительное устройство находилось в своем начальном положении (в данном примере шток цилиндра выдвинут или втянут).
Управляющий сигнал, который обеспечивает выполнение основной операции, обозначаем Yi (і – порядковый номер функционального модуля в схеме), а противоположный сигнал (в нашем примере возвращение штока в
исходное состояние) - Y i . Обеспечиваем исполнительное устройство
средствами контроля отработки заданных команд – датчиками контроля положения штока. Линию от датчика, контролирующего начальное положение
обозначаем как X i , и соответственно линию от датчика конечного положения штока - Хі .
16

 Хi
Хi
Хi
Yi |
|
|
Y |
|
|
|
i |
||
|
|
|
|
|
|
|
|
|
|
Рис. 2.2. Функциональный модуль с пневмоцилиндром в качестве исполнительного устройства
Функциональные модули отличаются между собой как исполнительным устройством, так и задачами, которые они выполняют в составе пневматических систем. Например, исполнительным устройством в составе системного модуля на рис. 2.2 является пневмоцилиндр поступательного движения. Он может применяться для подачи деталей на конвейер, для выгрузки готовых изделий и т.д. Для операций захвата деталей можно использовать пневмозахват (рис. 2.3). При этом для контроля усилия можно использовать реле давления.
В качестве самостоятельного функционального модуля могут также выступать пневматические распределительные клапаны.
Xi
|
|
Рис. |
2.3. Функциональный |
|
X |
|
модуль |
для |
выполнения |
|
операции «Захват» |
|
||
i |
|
|||
Yi
17
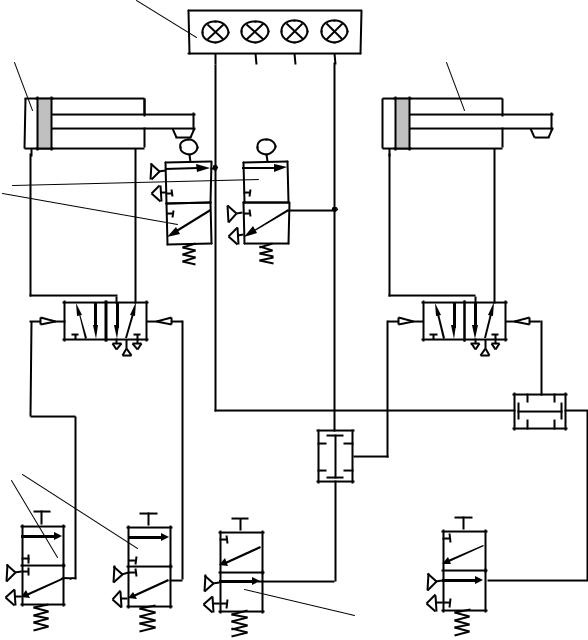
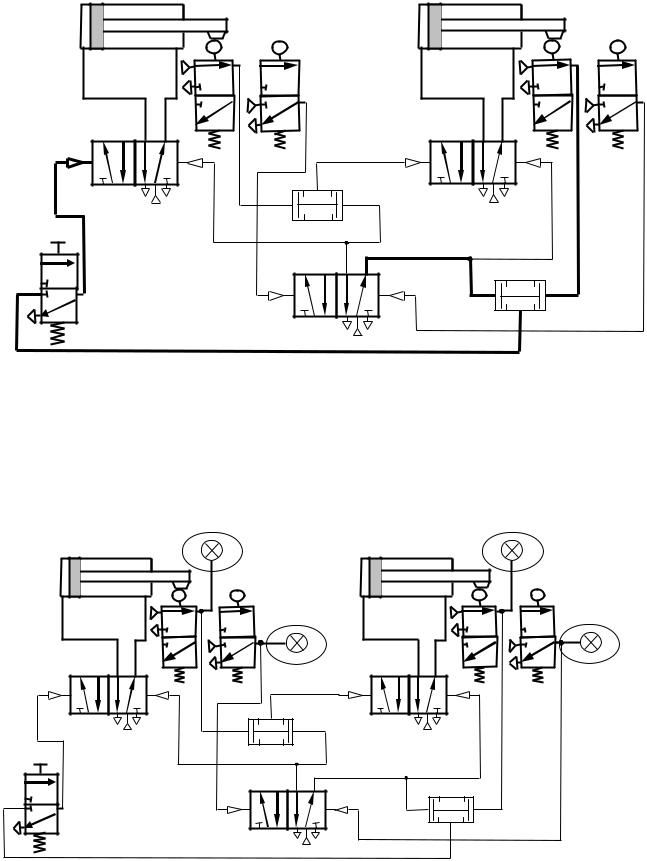
Пример построения схемы функционального модуля: Построение функционального модуля с использованием логических элементов «И» и «ИЛИ». Исполнительное устройство – цилиндр двустороннего действия, управляющее устройство - 5/2- распределитель с двухсторонним пневматическим управлением, 3/2 распределители с ручным управлением, индикация: пневмоцилиндр двустороннего действия и пневмолампочки.
Основной цилиндр 1, управляемый с помощью кнопок 5, выполняет функцию открытия и закрытия люка. Действия пневмоцилиндра контролируются двумя датчиками конечного положения 4, а также сигнальными лампочками 2. Дополнительный цилиндр 3 служит для установки ограждения в целях безопасности. Ограждение в случае, когда люк открыт можно убрать только при нажатии на кнопку 6.
|
2 |
1 |
3 |
4 |
|
5 |
|
6
Рис. 2.4. Пример схемы функционального модуля
18
Контрольные вопросы по работе
1.Какие устройства могут входить в состав функционального модуля? Приведите примеры модулей.
2.Сколько системных модулей в составе пневматической схемы на рис. 1.20 (см. лабораторную работу №1)?
3.Составить системный модуль, в состав которого входит пневматический моностабильный распределительный клапан, цилиндр с возвратной пружиной, действия которого контролируются датчиками положения.
4.Составить функциональный модуль, выполняющий операцию загрузки деталей на конвейер.
5.Составить пневматическую схему, состоящую из 2-х функциональных модулей. Нанести необходимую маркировку устройств.
Задания к лабораторной работе №2
Задача №1: Построение функционального модуля с использованием пневматического цилиндра с бистабильным управлением.
Выполняемая функция (операция транспортировки на рабочую позицию): перемещение выходного звена из исходной позиции в конечную позицию и возврат в исходную позицию. Исполнительное устройство – пневмоцилиндр двустороннего действия; управляющее устройство – 5/2 распределительный клапан с двухсторонним пневматическим управлением. Сигналы управляющих команд для всех задач подаются в ручном режиме с помощью распределителей с механическим (ручным) управлением (сигнал «Перемещение» Yвкл = Xкн1 , сигнал «Возврат» Yвыкл = Xкн2). Индикация отработки команд производится с помощью пневматических лампочек.
Задача №2: Построение функционального модуля с использованием клапана давления при действии пневматического цилиндра.
Выполняемая функция: контроль усилия захвата детали манипулятором. Исполнительное устройство – пневмоцилиндр двустороннего действия; управляющее устройство – 5/2 распределительный клапан с бистабильным пневматическим управлением и 5/2 распределительный клапан с моностабильным управлением, 3/2 распределительные клапаны с ручным управлением; индикация – пневматические лампочки.
Задача №3: Построение функционального модуля с использованием пневмоцилиндра одностороннего действия.
Выполняемая функция: выталкивание детали в лоток с рабочего стола и быстрый отвод штока. Исполнительное устройство – пневмоцилиндр одностороннего действия с возвратной пружиной; управляющие устройства: 3/2 распределительный клапан с двухсторонним пневматическим управлением, 3/2 распределительные клапаны с ручным управлением; индикация - пневмолампочки.
19