

Лабы АТП
.pdf
|
|
20 |
|
19 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
22 |
|
|
Модель очистного забоя с автоматизированной |
22 |
||||
|
|
|
струговой выемкой |
|
|
|||
21
21
Рисунок 5 – Внешний вид панели индикации |
23 |
|
|
|
|
Порядок выполнения и задание к выполнению лабораторной работы
1.Ознакомиться с краткими теоретическими сведениями об управлении стру- говой выемкой и сведениями об аппаратуре УМС-2: назначении, функцио- нальных возможностях.
2.Изучить конструкцию стенда.
3.Подать питание на аппарат УМС-2 (тумблер 2 перевести в верхнее положе- ние) и систему орошения (тумблер 3).
4.Установить текущее местонахождение струга в 000. Для этого нажать на кнопку 4. Установить дальнюю границу реверса (переключатели 8) и ближ- нюю границу реверса (переключатели 7) соответственно 010 и 020. Устано- вить переключатель 5 задания режима работы в положение «Автомат.» и на- жать кнопку 12 «Пуск струга вперед». Наблюдать алгоритм управления стру- гом на граничных участках. Отключить струг (тумблер 16). Изменить режим работы на «Дистанционный». Включить струг в направление к любому из участков реверсирования. Определить отличия данных режимов работы.
5.Записать текущее местонахождение струга в протокол и выключить питание (тумблер 2 вниз). Через 1-2 мин. восстановить питание и сравнить показания индикатора местонахождения с записью о его значении перед снятием пита- ния.
выдачей команд на исполнительные устройства и в общий блок, а также для сиг- нализации о питании блока и неисправности насосного агрегата. Исполнение – рудничное нормальное «РН».
Табло сигнальное типа СТВ предназначено для воспроизведения сигналов о состоянии автоматизированной водоотливной установки. Исполнение – руднич- ное нормальное «РН».
Датчик электродный типа ЭД предназначен для замыкания цепи управле-
ния в схеме автоматизированной водоотливной установки при повышении уровня воды в водосборнике до отметки установки датчика верхнего уровня и размыка- ния этой цепи при понижении уровня воды относительно отметки установки дат- чика нижнего уровня. Исполнение – нормальное.
Реле давления РДВ предназначено для контроля заливки главного насоса по давлению. Исполнение – рудничное нормальное «РН».
Реле производительности РПН предназначено для контроля производи- тельности насоса. Реле устанавливается на всасывающем трубопроводе. Реле
можно настроить на срабатывание при определенной скорости потока жидкости в трубопроводе, но не менее 1,0 м/с. Исполнение – рудничное нормальное «РН».
Термодатчики ТДЛ-2 предназначены для контроля температуры подшип- ников насоса и приводного электродвигателя.
Индикатор выхода ИВ-65 является контрольным прибором и используется для определения величины выходного сигнала генератора на каждой фиксиро- ванной частоте 14; 20; 26; 32 кГц. Для определения наличия частоты от генерато- ров, индикатор подключается к зажимам линии и переключателем «частота кГц» проверяют на каждом пределе величину высокочастотного сигнала.
Фильтр заградительный ФНЧ-1 предназначен для запирания каналов связи от токов частотой выше 3,5 кГц. Один фильтр на входе диспетчерского усилителя в рассечку телефонной линии у коммутатора, а другой устанавливается перед те- лефоном.
Принцип действия
Схемой аппаратуры УАВ предусмотрен «ручной» и автоматический ре- жимы работы насосов водоотливной установки. Аппаратура выполнена по блоч- ному принципу. Для управления каждым насосом предусмотрен индивидуальный блок управления. Общие элементы расположены в общем агрегатном блоке ОБН. В каждом блоке установлено реле времени (моторный коммутатор с профильны- ми дисками).
Принцип действия аппаратуры основан на обработке поступающих элек- трических сигналов от датчиков контроля и выдаче соответствующих электриче- ских сигналов на исполнительные механизмы и сигнальные устройства в функ- циональной зависимости от времени (обеспечивается использованием моторного реле времени).
20 |
57 |
-при отключении за неисправностью одного из насосных агрегатов, рабо- тающего в автоматическом режиме, взамен него включается резервный, настро- енный для работы от аварийного уровня;
-автоматическое отключение насоса при включении его с пульта диспетче- ра и достижении водой нижнего уровня, а также дистанционное отключение при уровне ниже верхнего;
-переход с автоматического управления на ручное;
-дозирование заливки (по времени);
-следующие виды защиты:
а) |
гидравлическую защиту по расходу воды; |
б) |
защиту от перегрева подшипников; |
в) |
заклинивания задвижки; |
г) |
невозможность повторного включения неисправного насосного агрегата |
без вмешательства обслуживающего персонала; |
|
- следующие виды сигнализации: |
|
а) |
о питании табло сигнального – световая; |
б) |
о работе насосов – обезличенная световая; |
в) |
о неисправности насосных агрегатов - обезличенная световая и звуко- |
вая; |
|
г) |
об аварийном уровне воды в водосборнике - звуковая и световая. |
Состав
Комплект аппаратуры УАВ для автоматизации типовой главной водоот- ливной установки, оборудованной тремя насосными агрегатами, включает в свой состав (см. рис.1): общий блок насосов типа ОБН, два блока насосов типа БН, од- но сигнальное табло СТВ, три реле производительности типа РПН, три реле дав- ления типа РДВ, погружной заливочный насос типа ЗПН, электропривод задвиж- ки типа ЭПЗ-1, четыре электродных датчика типа ЭД (НУ - нижний, ВУ- верхний, ПУ- повышенный уровень, АУ –аварийный), двенадцать термодатчиков типа ТДЛ-2, два заградительных фильтра типа ФНЧ-1, индикатор выхода типа ИВ-65, пускатель типа ПЭП-3 электропривода задвижки, пускатель ПЗ заливочного на- соса.
При увеличении насосных агрегатов на водоотливной станции увеличива- ется соответственно количество блоков БН и датчиков.
Общий блок насосов типа ОБН предназначен для обработки сигналов, по-
ступающих от датчиков и выдачи команд на исполнительные устройства и в блок насоса БН, а также для выдачи сигналов диспетчеру о состоянии насосных агрега- тов.
Блок насоса типа БН предназначен для выбора режима работы насоса, обра-
ботки сигналов поступающих от насосов и общего блока ОБН с последующей
6.Включить струг и конвейер. Нажать на кнопку 18 «Стоп аварийный», оп- ределить влияние этой команды на состояние объектов управления.
7.Зная, что дискретность отсчета местонахождения равна ½ длины решта- ка (0.5*1.2 м=0.6) определить максимальную длину лавы, в которой мо- жет эксплуатироваться аппарат УМС-2 и расстояние между ячейками орошения. Для этого необходимо использовать кнопки корректировки местонахождения 6.
8.Подготовить и оформить отчет о лабораторной работе.
Содержание отчета
В отчете привести назначение, область применения, функции и состав ап- паратуры УМС-2. Описать структурную схему УМС-2. Привести результаты ис- следований принципа работы аппаратуры УМС-2 на лабораторном стенде. Вы- воды.
Контрольные вопросы
1.Назначение и область применения аппаратуры УМС-2.
2.Состав аппаратуры УМС-2.
3.Назначение органов управления на пульте управления аппаратуры УМС-2.
4.Каково назначение концевых датчиков положения струга? Чем вызвана необ- ходимость их применения?
5.В каких единицах измеряется местонахождение струга и почему?
Рекомендуемая литература
1.Игнатьев А.Д. Струговая выемка угля.- М.: Недра, 1978.- 237с.
2.Аппаратура автоматизации струговых установок и комплексов
/В.А. Антипов, И.С. Кибрик, В.А. Барданов и др. - К.: Технiка, 1988 -136с.
56 |
21 |
ЛАБОРАТОРНАЯ РАБОТА №3
Т е м а: «ИССЛЕДОВАНИЕ КОМПЛЕКСА
АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ КОНВЕЙЕРАМИ типа АУК – 1М»
Цель работы - изучение состава, конструкции, выполняемых функций и ис- следование комплекса АУК – 1М на лабораторном стенде.
Краткие сведения об аппаратуре АУК – 1М
Назначение
Комплекс (в дальнейшем аппаратура) АУК – 1М предназначен для автома- тизированного управления стационарными и полустационарными неразветвлён- ными конвейерными линиями, состоящими из ленточных и скребковых конвейе- ров (с общим количеством их до 10). При применении комплекса АУК – 1М для
управления разветвлёнными конвейерными линиями с числом ответвлений до трёх, каждое ответвление управляется как самостоятельная неразветвлённая ли- ния.
Область применения
Аппаратура АУК – 1М рассчитана на применение в подземных выработках шахт, опасных по газу и пыли, но может также применяться на рудниках, обога- тительных фабриках и других предприятиях.
Функции
Аппаратура АУК – 1М выполняет следующие основные функции:
1.Последовательный автоматический пуск конвейеров, включённых в ли- нию, в порядке, обратном направлению движения грузопотока, с необходимой выдержкой времени между пусками отдельных приводов.
2.Пуск, с пульта управления или с выносного кнопочного поста, как всей конвейерной линии, так и её части.
3.Дозапуск, с пульта управления или с выносного кнопочного поста, части конвейерной линии без отключения работающих конвейеров и с подачей преду- предительной сигнализации.
4.Местный пуск любого привода конвейера при осмотрах, ремонтах и оп-
робованиях.
5.Контроль заданного максимального времени запуска каждого конвейера.
6.Автоматическое отключение привода конвейера при аварийных режимах
иотключение последующих конвейеров, подающих груз на поверхностный кон- вейер.
7.Возможность экстренного прекращения запуска с любой точки конвей- ерной линии.
8.Возможность работы аппаратуры на разветвлённой конвейерной линии.
ЛАБОРАТОРНАЯ РАБОТА № 8
Те м а: «ИССЛЕДОВАНИЕ АППАРАТУРЫ АВТОМАТИЗАЦИИ
ГЛАВНОЙ ВОДООТЛИВНОЙ УСТАНОВКИ типа УАВ»
Цель работы – изучение состава, конструкции и исследование принципа действия аппаратуры автоматизации типа УАВ.
Краткие сведения об аппаратуре УАВ
Назначение
Аппаратура унифицированная типа УАВ предназначена для автоматизации водоотливных установок, оборудованных насосными агрегатами (в количестве до 16 штук ) с высоковольтными и низковольтными асинхронными короткозамкну- тыми электродвигателями.
Область применения
Аппаратура УАВ применяется в шахтах для автоматизации главных водо- отливных установок.
Функции
Аппаратура УАВ обеспечивает:
- автоматическое управление насосными агрегатами по уровню воды в во- досборнике;
-местное (ручное) управление отдельными агрегатами;
-перевод на ручное управление любого количества насосных агрегатов без нарушения работы остальных в автоматическом режиме;
-возможность пуска (при наличии одной свободной жилы кабеля) и оста- новки (при наличии двух свободных жил кабеля) насосных агрегатов от диспет- чера, работающих в режиме автоматического управления (настроенных для рабо- ты от верхнего уровня), независимо от уровня воды в водосборнике;
-последовательность включения и отключения электродвигателей насос- ных агрегатов с выдержкой времени, что исключает их одновременное включение
иотключение при параллельной работе;
-включение одного или нескольких насосных агрегатов при верхнем уровне воды в водосборнике;
-при повышении уровня воды дополнительное включение одного или не- скольких насосных агрегатов;
-при аварийном уровне воды дополнительное включение одного или не- скольких насосных агрегатов;
22 |
55 |
5.3 Перевести на мнемосхеме переключатели нижнего уровня и верхнего уровня в правое положение (имитация свободного от воды водосборника – нет верх- него и нижнего уровня). Зафиксировать управляющее воздействие.
6.Исследование принципа действия аппаратуры АВН-1М в аварийных режимах водоотливной установки.
6.1Повторить действия, описанные в пункте 5.1. После загорания лампочки на мнемосхеме “включение основного насоса” не включать переключатель “за- щита”. Зафиксировать управляющее воздействие и изменение светоиндика- ции на СТВ.
6.2После включения резервного насоса в работу перевести переключатель “за- щита” в левое положение, на мнемосхеме тумблер аварийного уровня пере- вести в левое положение – имитация аварийного уровня. Зафиксировать
управляющее воздействие и изменение светоиндикации на СТВ.
Примечание. Снять насосы с аварии и перезапустить аппаратуру АВН-1М, можно выключив, а затем включив его контактором (поз.1 на рис.3).
7 Исследование принципа действия аппаратуры АВН-1М в режиме “ремонт”.
7.1Снять напряжение с АВН-1М поворотом рычага контактора на аппарате АУН-1М (поз.1 на рис.3).
7.2Переключатель работы одного из насосов (поз. 5 на рис. 3 ) перевести в по- ложение “ремонт”.
7.3Повторить действия, описанные в пунктах 5 и 6, фиксируя в процессе работы
изменение светоиндикации на СТВ и сигнальных лампах, расположенных на блоке АУН-1М.
8.Подготовить и оформить отчет о лабораторной работе.
Содержание отчета
В отчете привести назначение, область применения, функции, состав и структурную схему аппаратуры АВН-1М. На основании результатов исследова- ний описать принцип действия аппаратуры АВН-1М. Выводы.
Контрольные вопросы
1.Назначение, область применения и функции аппаратуры АВН-1М.
2.Состав и назначение составных частей аппаратуры АВН-1М.
3.Структурная схема и принцип действия аппаратуры АВН-1М.
Рекомендуемая литература
1.Батицкий В.А., Куроедов В.И., Рыжков А.А. Автоматизация производствен- ных процессов и АСУ ТП в горной промышленности. - М.: Недра 1991. - 303с.
2.Овсянников Ю.А., Кораблев А.А., Топорков А.А. Автоматизация подземного оборудования: Справочник рабочего. - М.: Недра, 1990. - 287с.
9. Возможность работы конвейерной линии в режиме энергосберегающей технологии с применением дополнительных аппаратов.
Наряду с указанными функциями аппаратура АУК – 1 М имеет целый ряд различных блокировок, защит, сигнализаций и телефонную связь [1].
Состав
На рисунке 1 приведена структурная схема системы АУК – 1М.
|
|
|
|
|
|
|
|
|
1 |
|
|
|
1 |
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
КП |
|
|
ПУ |
|
|
|
2 |
|
БУ |
|
2 |
|
БУ |
|
2 |
|
БУ |
2 |
|
|
БУ |
2 |
КР |
|||||||||
|
|
|
|
|
|
1 |
|
|
2 |
|
|
3 |
|
|
|
10 |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
3 |
3 |
3 |
ВПУ |
|
СЗ |
|
|
ДС |
|
СЗ |
|
|
СЗ ДЗ КТВ-2 |
ДС |
|
ДЗ |
СЗДЗ |
|
|
|
|
ДЗ |
|
|
КДК |
ДМИ1 |
|||
БС1 |
|
|
|
ДМ |
|
КТВ-2 |
||
|
|
|
|
|
|
|||
|
КСЛ-2 |
|
КСЛ-2 |
|
|
|||
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
ДМИ1 |
КВ КВ |
П1 |
|
П2 |
|
П3 |
|
П10 |
|
|
М1 |
РВИ |
М2 |
УКПС |
М3 |
|
М10 |
|
|
-1М |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ДС1 ДС2 |
|
|
|
|
|
Рисунок 1 – Структурная схема аппаратуры АУК – 1М |
|
||||||
В состав аппаратуры АУК – 1М входят (см. рис.1):
-пульт управления ПУ;
-выносной прибор-указатель ВПУ;
-блоки управления БУ (по количеству конвейеров в линии);
-блок концевого реле БКР;
-датчики скорости ДС типа УПДС или ДКС, ДМ – 2 или ДМ – 2М;
-датчики контроля схода ленты типа КСЛ - 2;
-кабель - тросовые выключатели типа КТВ - 2;
-датчики заштыбовки ДЗ;
-телефонные трубки;
-сирены типа ВСС – 3М или гудки типа ГПРВ – 2М.
Пульт управления имеет взрывобезопасный корпус, в котором закреплена выемная часть с элементами электрической схемы. На передней панели выемной части расположен блок из шести реле типа РКН. На нижней части крышки корпу- са находятся нажимные штоки трёх кнопок.
Выносной прибор – указатель выполнен в виде отдельного стального кор- пуса, в котором расположены: прибор – указатель числа работающих телефонов,
54 |
23 |
блок телефона. |
|
На рисунке 4 обозначено: |
|
Блок управления по общей компоновке аналогичен пульту управления. На |
1 – Сигнальная лампа «работа насоса», загорается во время пуска насосного агре- |
||
передней панели выемной части блока управления размещены: прибор контроля |
|
гата и горит на протяжении всей его работы. |
|
настройки реле скорости, блок из шести реле типа РКН. На нижней части крышки |
2 – Сигнальная лампа «неисправность насоса», загорается при выходе в режим |
||
корпуса расположено пять нажимных штоков для кнопок, причём кнопка «Рем» - |
|
аварии одного или нескольких насосных агрегатов. |
|
«Авт» может быть зафиксирована в положении «Рем», а в положении «Авт» - оп- |
3 – Сигнальная лампа «аварийный уровень», загорается при достижении водой в |
||
ломбирована. |
|
водосборнике отметки «аварийный уровень». |
|
Пульт управления ПУ с выносным прибором - указателем ВПУ располага- |
4 – Сигнальная лампа «питание схемы», загорается при подаче напряжения пи- |
||
ется, как правило, в головной части конвейерной линии. Блоки управления БУ ус- |
|
тания на СТВ. |
|
танавливаются около привода каждого конвейера. К каждому блоку управления |
5,6 – Переключатели «нормально», предназначенные для отключения звонка в |
||
подключаются: |
|
случае аварийного режима насосного агрегата или достижения водой в водо- |
|
- датчик скорости (на рисунке 1 обозначен как ДС); |
|
сборнике аварийного уровня. |
|
- датчик контроля схода ленты (КСЛ - 2); |
7 – Кнопка «Пуск» - используется для дистанционного пуска насоса (при ручном |
||
- кабель - тросовые выключатели КТВ - 2 для экстренного прекращения |
|
управлении) при условии наличия нижнего уровня воды в приемной емкости |
|
пуска и аварийной остановки конвейера; |
|
и дополнительной пары проводов к АУН-1М. |
|
- датчики контроля заштыбовки ДЗ, например, в виде электродного датчи- |
8 – Кнопка «Стоп» - используется для дистанционного останова насоса (при руч- |
||
ка, выполненного из гибкого неэкранированного шахтного кабеля; |
|
ном управлении). |
|
- сигнализатор звуковой (СВ - 1); |
|
|
|
- блок концевого реле БКР (подключается только к последнему блоку |
|
Порядок выполнения и задание к выполнению лабораторной работы |
|
управления). |
1. |
Изучить описание аппаратуры АВН-1М. |
|
В зависимости от назначения и конструкции конвейера к блоку управления |
2. |
Ознакомиться с конструкцией составных элементов аппаратуры на лабора- |
|
могут подключаться следующие дополнительные аппараты: |
|
торном стенде. |
|
- аппарат КДК с датчиками ДМИ – 1 для контроля целостности цепи двух- |
3. |
Привести в исходное состояние переключатели: все тумблеры на мнемосхеме |
|
цепного скребкового конвейера; |
|
установить в правое положение; на аппарате АУН – 1М переключатели «ра- |
|
- реле скорости УКС или КС для контроля скорости ленты ниже 0.5 м/с при |
|
бота - ремонт» (поз.5 на рис.3) перевести в положение “работа”, а переключа- |
|
наложении тормозов или для стыковки нескольких неразветвлённых маршрутов в |
|
тель «ручное - автомат» (поз.4 на рис.3) установить в положение «автомат»; |
|
единую конвейерную линию; |
|
на СТВ переключатели |
(поз.5,6 на рис.4) перевести в положение «нормаль- |
- аппарат УКПС или КСП для контроля работы двухскоростных (например, |
|
но». |
|
грузолюдских) конвейеров, контроля скорости бремсберговых конвейеров при |
4. |
Подать напряжение на |
АВН-1М поворотом на аппарате АУН – 1М рычага |
превышении скорости ленты, а также при управлении конвейерами с асинхрон- |
|
контактора на 90° ( поз.1 на рис. 3). Выдержать паузу примерно 3 минуты. |
|
ными двигателями с фазным ротором и тормозной системой; |
5. |
Исследование принципа действия аппаратуры АВН-1М в нормальном режиме |
|
- реле времени РВИ – 1М для увеличения выдержки времени на срабатыва- |
|
работы водоотливной установки. |
|
ние аварийного реле блока управления. |
5.1 |
Перевести на мнемосхеме переключатели нижнего уровня и верхнего уровня |
|
Питание пульта и каждого блока управления искроопасным напряжением |
|
в левые положения (имитация срабатывания датчиков соответственно нижне- |
|
36В осуществляется от пускателей или от блоков сигнализации (БС - 1). |
|
го и верхнего уровней). Выдержать паузу примерно 30 сек. Зафиксировать |
|
Принцип действия |
|
управляющее воздействие аппаратуры. Выдержать паузу примерно 100 сек. |
|
|
Зафиксировать управляющее воздействие аппаратуры. |
||
Взрывобезопасное исполнение аппаратуры и искробезопасные параметры |
5.2 |
После загорания на мнемосхеме лампочки “включение основного насоса 1” |
|
цепей управления позволяют осуществлять управление, сигнализацию, контроль |
|
(“2” или ”3”) перевести в левое положение переключатель “защита” (имита- |
|
работы конвейерной линии и телефонную связь по двум изолированным друг от |
|
ция срабатывания датчика подачи РПФВ). Зафиксировать изменение свето- |
|
друга голым проводам («1» и «2») и общешахтному контуру «земля» или |
|
индикации на СТВ. |
|
24 |
53 |

Рисунок 3 – Схема расположения светоиндикации и органов управления на аппарате АУН-1М
Табло сигнальное СТВ предназначено для воспроизведения сигналов о со- стоянии водоотливной установки. Схема расположения светоиндикации и органов управления на СТВ приведена на рисунке 4.
Рисунок 4 – Схема расположения светоиндикации и органов управления на
СТВ
с помощью трёх жил контрольного кабеля.
Пуск конвейерной линии осуществляется путём подачи в линию управле- ния (провода «1» и «2») пусковой полярности («+» на проводе «1», «-» на проводе «2»). После окончания пускового процесса производится переключение пусковой полярности на рабочую («+» на проводе «2», «-» на проводе «1»), при этом реле управления БУ второго конвейера питается через контакты реле скорости БУ пер- вого конвейера. Таким образом, осуществляется электромеханическая блокировка работы последующего конвейера в зависимости от работы предыдущего конвейе- ра.
Порядок автоматического выполнения команд после кратковременного на- жатия кнопки «Пуск» или ВКП следующий:
-по линии подаётся предупредительный звуковой сигнал;
-через 5 ÷ 8 с. с пульта на первый блок БУ поступает пусковая полярность, включаются реле управления и с помощью пускателя запускается первый конвей-
ер;
-с выдержкой времени до 5 с. включается реле скорости в блоке БУ перво- го конвейера и подаётся пусковая полярность на БУ первого конвейера, затем на блок БУ второго конвейера и т.д.;
-с выдержкой времени в пределах 20÷90 с. включается реле скорости блока
БУ последнего конвейера и подаётся пусковая полярность на блок концевого реле
БКР;
-кратковременно включается БКР и по линии сигнализации (провод «2», земля) на пульт ПУ поступает команда окончания пуска;
-в пульте ПУ формируется сигнал переключения пусковой полярности на
рабочую, блок БКР отключается; - все конвейеры будут работать в режиме контроля заданных параметров
(скорости, заштыбовки, пробуксовки и др.) с последовательной блокировкой. Отключение конвейерной линии может производиться оператором, путём
нажатия кнопок «Стоп» пульта ПУ или любого блока БУ.
Экстренное прекращение пуска или аварийное отключение осуществляется кнопками «Сигнал» пульта ПУ или блока БУ, выключателя КТВ – 2 или замыка- нием голых проводов «1» и «2».
Описание лабораторного стенда
Промышленная аппаратура АУК – 1М представлена на специальном стен- де технических средств для автоматизации конвейерной линии, состоящей из че- тырёх конвейеров. Структурная схема лабораторного стенда приведена на рисун- ке 2.
52 |
25 |

|
|
|
8 |
7 |
|
1 |
13 |
|
|
|
|
|
|
||
|
34 |
9 |
33 |
31 |
32 |
|
|
|
|
|
|
mA 5 |
mA 2 |
|
|
|
|
~220В |
|
14 |
|||
|
|
|
|
10 |
|
|
|
“1” |
|
|
|
|
|
|
|
29 |
30 |
|
|
mA 6 |
mA 3 |
|
|
“2” |
|
|
|
||||
“земля” |
|
|
|
|
|
|
15 |
|
|
|
|
|
11 |
|
|
|
|
|
|
|
mA 4 |
|
|
20 |
|
|
|
|
12 |
|
|
16 |
17 |
18 |
19 |
|
|
||
|
|
|
|
||||
22 |
|
|
|
|
|
21 |
|
|
|
|
|
|
|
|
|
23 |
24 |
|
25 |
27 |
|
26 |
28 |
Рисунок 2 – Структурная схема лабораторного стенда технических
средств автоматизации конвейерной линии
На стенде расположены следующие элементы и устройства для автомати- зации конвейерных линий:
1 - пульт управления аппаратуры АУК – 1М;
2- БУ1 аппаратуры АУК – 1М;
3- блок БУ2 аппаратуры АУК – 1М;
4- блок БУ3 аппаратуры АУК – 1М;
5- демонстрационный блок БУ аппаратуры АУК – 1М;
6- блок БУ4 аппаратуры АУК – 1М;
7- ВПУ аппаратуры АУК – 1М;
8- устройство КСП;
9- тумблер вкл/откл КСП (~ 36В);
10- аппаратура типа УКИ;
11- устройство РВИ 1;
12- датчик БКВ;
13- датчик ДЗШ;
14- датчик ВКВ;
15- блок БКР аппаратуры АУК – 1М;
16- привод с УПДС 1-го конвейера;
17- привод с УПДС 2-го конвейера;
18- привод с УПДС 3-го конвейера;
19- привод с УПДС 4-го конвейера;
включены контакты различных реле аппарата управления, с помощью которых и производится подключение и отключение генераторов.
В момент пуска насоса на СТВ загорается сигнальная лампа «работа насо- са» и горит на протяжении всей работы насосного агрегата. В случае же неис- правности одного или нескольких насосов на табло загорается лампа «неисправ- ность насоса». Эта же лампа горит в случае обрыва или к.з. линии связи. Сигнали- зация осуществляется по двум занятым или свободным телефонным проводам.
Описание лабораторного стенда
На лабораторном стенде представлена промышленная аппаратура АВН-1М. Структурная схема стенда приведена на рисунке 2. На рисунке обозначено: 1 – аппарат АУН-1М; 2 – блок генераторов БРУ; 3,4 – фильтры низкой частоты соот- ветственно ФНЧ-1 и ФЗ-2 (в аппаратуре используется один из них); 5 – СТВ.
2
3 4
1
5
Рисунок 2 – Структурная схема лабораторного стенда
Схема расположения светоиндикации и органов управления на аппарате АУН - 1М приведена на рисунке 3. На рисунке обозначено: 1 – выключатель пи- тающего напряжения; 2 – сигнальные лампы, индицирующие выход в режим ава- рии одного или нескольких насосных агрегатов; 3 – мнемосхема (только для ла- бораторного аппарата) с условным изображением водоотливной установки, све- тоиндикаторами работы насосных агрегатов и состояния уровня воды в водосбор- нике, а также переключателями, имитирующими уровень воды в водосборнике и срабатывание гидравлической защиты; 4 – переключатель «ручное - автомат» - предназначен для вывода аппаратуры на ручной или автоматический режимы ра- боты; 5 – переключатели «работа - ремонт» - предназначены для вывода в режим ремонта одного или нескольких насосов одновременно.
26 |
51 |
Фильтр заградительный ФНЧ-1 предназначен для запирания каналов связи от токов частотой выше 3,5 кГц.
Принцип действия
Принцип действия аппаратуры АВН-1М основан на обработке поступаю-
щих электрических сигналов от датчиков контроля и выдачи соответствующих электрических сигналов на исполнительные механизмы и сигнальные устройства в функциональной зависимости от времени (обеспечивается использованием мо- торного реле времени).
При повышении уровня воды в водосборнике до отметки «верхний уро- вень» ВУ включается погружной заливочный насос, который производит заливку всех трех главных насосов. Контроль заливки ведется по времени (примерно 90сек.). По истечении времени заливки включается основной насос и с помощью РПФВ контролируется производительность насоса.
Если включенный насос не развивает нормальной производительности, то он будет отключен (гидравлическая защита) и в работу включится следующий по порядку насос. Отключение происходит после понижения уровня воды до отмет- ки «нижний уровень» НУ. С повышением уровня воды в работу включается сле- дующий по порядку насос. При аварийном уровне АУ в водосборнике на сиг- нальном табло звенит звонок и загорается сигнальная лампа «аварийный уро- вень». В этом случае насосную установку переводят на ручное управление и включают необходимое количество насосов, чтобы быстрее ликвидировать ава- рийное состояние (затопление).
В случае выключения и последующего включения напряжения, пуск рабо- тавшего насоса не происходит, т. к. реле нулевой защиты РН (на схеме рис. 1 не показано) разомкнет свой блок-контакт и останется обесточенным. При появле-
нии напряжения контактные диски моторного реле будут поставлены в исходное положение, и станет возможным пуск очередного насоса после достижения водой «верхнего уровня».
Для опробования насосных установок при ремонтах, либо при аварийных уровнях воды в водосборнике, когда требуется одновременная работа двух или даже трех насосов, насосную установку переводят на ручное (местное) управле- ние поворотом рукоятки переключателя режимов в положение «ручное управле- ние». После чего, пользуясь кнопками, установленными на магнитных пускателях насосов, можно управлять главным и заливочным насосами. Функционирование системы сигнализации о состоянии водоотливной установки основано на частот- ном разделении каналов связи в свободной или занятой паре жил телефонной ли- нии с помощью трех генераторов частоты: Г—14 кГц (аварийный уровень); Г—26 кГц (неисправность насоса и контроль линии связи); Г—20 кГц (работа насоса), установленных в блоке БРУ—2 и трех приемников 1ПС, 2ПС, ЗПС, установлен-
ных в табло сигнальном. В цепь питания каждого генератора последовательно
20- датчик КСЛ 1-го конвейера;
21- датчик КСЛ 3-го конвейера;
22, 23, 24, 27,28 - линейные модули аппаратуры УКИ; 25, 26 - кабель - тросовые выключатели типа КТВ; 29 - миллиамперметр в цепи линии связи 1,2; 30 - вольтметр в линии связи 1,2;
31 - сигнальная лампа, сигнализирующая о подаче питания ~ 36В на стенд; 32 - регулятор скорости ленты для аппаратуры КСП; 33 - индикаторы включения количества двигателей приводов конвейеров.
Порядок выполнения и задание к выполнению лабораторной работы
1. Изучить работу аппаратуры АУК – 1М по принципиальной электриче- ской схеме.
2.Ознакомиться со структурной схемой аппаратуры АУК – 1М и располо- жением комплекта оборудования на лабораторном стенде.
3. Привести в исходное состояние аппаратуру:
- установить тумблеры S9 на БУ (2,3,4) в положение «Л» - «Д»; тумблеры S5 в положение «Откл»; тумблеры на БРС в положение «Л»; на БУ (6) тумблер В6
÷ В7 в положение «БОВТ»; тумблер В2 в положение «Откл»; на БРС тумблер в положение «Л»;
-тумблером (32) подать напряжение питания ~36В на стенд;
-зафиксировать состояние схемы (индикация, состояние реле вкл/откл). 4. Пусковые режимы конвейерной линии.
4.1«Пуск» всей конвейерной линии в автоматизированном режиме, нор- мальная работа.
Кратковременно нажать кнопку «Пуск» на пульте управления ПУ и опре- делить влияние этой команды на состояние объекта управления, зафиксировать всю информацию (сигнализация, последовательность запуска приводов, выдерж- ки времени, состояние показывающих приборов (29,30,7)).
4.2«Пуск» части конвейерной линии (1-го, 2-х, или 3-х конвейеров – по ука- занию преподавателя) в автоматизированном режиме, нормальная работа.
Кратковременно нажать кнопку «Пуск» на пульте управления ПУ. Запуск
нужного количества конвейеров контролировать визуально по показаниям ВПУ
(7). Нажать на кнопку «Сигнал» пульта управления ПУ, определить влияние этой
кнопки на состояние объекта управления.
4.3 Пуск отдельного конвейера конвейерной линии в местном режиме.
На указанном преподавателем блоке управления БУ перевести тумблеры S9 соответственно из положения «Л» и «Д» в положение «К» и «М». Затем крат- ковременным одновременным воздействием на три кнопки управления («рем», «проверка», «сигнал») указанного БУ запустить данный конвейер. Определить
50 |
27 |

влияние этой команды на состояние объекта управления, зафиксировать всю ин- формацию. Воздействием на кнопку «Стоп» данного БУ отключить работающий конвейер в местном режиме, а тумблеры S9 перевести в исходное состояние «Л» и «Д».
5 Технологические блокировки и защиты.
5.1 Заштыбовка конвейерной линии в местах пересыпа.
При работе определенного количества конвейеров (заданного преподавате- лем) воздействовать на датчик заштыбовки ДЗШ (13). Определить влияние этого датчика на состояние конвейерной линии, зафиксировать сигнализацию и инди- кацию на блоке управления БУ. Повторно запустить указанное преподавателем количество конвейеров и воздействовать на датчик ВКВ (14) . Проанализировать состояние конвейерной линии. Отключить конвейерную линию, воздействуя на кнопку «Стоп» пульта управления ПУ.
5.2. Сход ленты.
При работе определенного количества конвейеров (заданного преподавате- лем) воздействовать на датчик (21) КСЛ – 2 (отклонить шток в сторону). Отме- тить, что происходит в этом случае с учётом сигнализации и индикации на блоке управления БУ. Повторно запустить указанное преподавателем количество кон- вейеров и аналогично воздействовать на другой датчик КСЛ – 2 (20), зафиксиро- вать и проанализировать состояние конвейерной линии. Отключить работающие конвейеры путём воздействия на кнопку «Стоп» пульта управления ПУ.
5.3. Снижение скорости ленты.
При работе определенного количества конвейеров (заданного преподавате- лем) воздействовать (отклонить вниз) на датчик скорости (16) первого конвейера (имитируя порыв ленты или её пробуксовку, при которой скорость ленты снижа- ется более чем на 25% от номинальной), зафиксировать и проанализировать, что при этом происходит, обратив особое внимание на сигнализацию и индикацию. Повторно запустить указанное преподавателем количество конвейеров и анало- гично воздействовать на датчик скорости (17) второго конвейера. Определить влияние этого датчика на состояние конвейерной линии. Отключить работающие конвейеры путём воздействия на кнопку «Стоп» пульта управления ПУ.
5.4. Срабатывание кабель-тросовых выключателей.
При работе определенного количества конвейеров (заданного преподавате- лем) воздействовать на кабель-тросовый выключатель КТВ – 2 (25). Затем по- вторно запустить указанное преподавателем количество конвейеров и воздейство- вать на другой кабель-тросовый выключатель КТВ – 2 (26).
При выключенной конвейерной линии произвести переключение переклю- чателя на КТВ – 2 (25) в положение «Откл» и произвести запуск конвейерной линии.
При выключенной конвейерной линии произвести переключение переклю- чателя на КТВ – 2 (26) в положение «Откл» и произвести запуск конвейерной
генераторов БРУ-2, погружной заливочный насос ЗПН, термодатчики типа ТДЛ-2 –12 шт., фильтр заградительный ФНЧ-1, индикатор выхода ИВ-65.
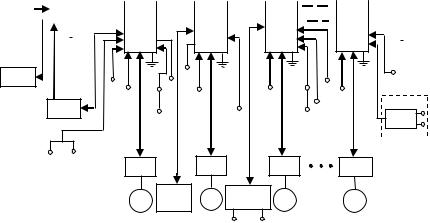
Структурная схема аппаратуры АВН-1М приведена на рисунке 1.
|
|
|
|
АУН – 1М |
|
|
|
|
|
|
СТВ |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
НА1 |
|
|
|
НА2 |
|
|
|
|
|
НА3 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ЗПН |
|
|
|
|
|
|
|
|
|
БРУ - 2 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ФНЧ |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ТДЛ - 2 |
|
ТДЛ - 2 |
|
ТДЛ - 2 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ИВ |
-65 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ЭД |
|
ЭД |
|
|
ЭД |
|
РПФВ – |
|
РПФВ – |
|
РПФВ – |
|
|
|
|
|
|
||||||||||
(НУ) |
|
(ВУ) |
|
|
(АУ) |
|
|
1К |
|
|
1К |
|
1К |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 1 – Структурная схема аппаратуры АВН – 1 М
Аппарат управления АУН-1М предназначен для обработки сигналов, по- ступающих от датчиков уровня, производительности, термодатчиков и выдачи команд на исполнительные устройства (пускатели заливочного насоса ЗПН и на- сосных агрегатов НА1, НА2, НА3) и табло сигнальное СТВ.
Датчик электродный ЭД предназначен для замыкания цепи управления при повышении уровня воды в водосборнике до отметки установки датчика ВУ, АУ и размыкания этой цепи при понижении уровня воды ниже отметки установки дат- чика НУ.
Реле производительности РПФВ-1К обеспечивает контроль подачи насоса. Термодатчики ТДЛ-2 предназначены для контроля температуры подшип-
ников насоса и приводного электродвигателя.
Блок генераторов БРУ-2 предназначен для выдачи сигналов на фиксиро- ванных частотах 14, 20 и 26 кГц на сигнальное табло и коммутации искробезо- пасных цепей схемы.
Индикатор выхода ИВ-65 используется для контроля величин выходных сигналов генераторов.
28 |
49 |
ЛАБОРАТОРНАЯ РАБОТА № 7
Т е м а: «ИССЛЕДОВАНИЕ АППАРАТУРЫ АВТОМАТИЗАЦИИ
ВОДООТЛИВНОЙ УСТАНОВКИ типа АВН-1М»
Цель работы – изучение состава, конструкции и исследование принципа действия аппаратуры автоматизации АВН-1М.
Краткие сведения об аппаратуре АВН-1М
Назначение
Аппаратура АВН-1М предназначена для автоматического управления во- доотливными установками, оборудованными тремя насосами с низковольтными асинхронными электродвигателями с короткозамкнутыми роторами.
Область применения.
Аппаратура АВН-1М применяется для автоматизации участковых водоот- ливных установок шахт, в том числе опасных по газу и пыли.
Функции
Аппаратура АВН-1М обеспечивает:
-автоматическое управление насосной установкой по уровню воды в водо- сборнике;
-поочередную работу насосов;
-автоматический пуск очередного насоса при неисправности работающего;
-переход с автоматического управления на ручное;
-гидравлическую защиту по расходу;
-защиту от перегрева подшипников скольжения;
-следующие виды дистанционного контроля и сигнализации:
а) при аварийном уровне - световую и звуковую; б) о неисправности насосов - световую и звуковую;
в) о наличии питания сигнального табло – световую; г) о цельности сигнальных цепей - световую и звуковую; д) о работе насосов – световую.
Состав
Аппаратура АВН-1М (для управления тремя насосными агрегатами) вклю- чает в свой состав : аппарат управления АУН-1М – 1шт., табло сигнальное СТВ– 1шт., реле производительности типа РПФВ-1К – 3шт., датчики уровня электродные типа ЭД – 3шт. (НУ - нижний, ВУ - верхний, АУ - аварийный), блок
линии.
В каждом случае зафиксировать и проанализировать, что происходит с ра- ботой конвейерной линии, обратив особое внимание на сигнализацию и индика- цию.
Отключить конвейеры путём нажатия на кнопку «Стоп» пульта управления
ПУ.
6.Отключить питание стенда (тумблером 32).
7.Подготовить и оформить отчет о лабораторной работе.
Содержание отчёта
1.Назначение, функции и структурная схема аппаратуры АУК – 1М.
2.Принцип действия. Указать режимы работы аппаратуры с анализом ра- боты (по указанию преподавателя).
3.Выводы
Контрольные вопросы
1.Назначение и область применения аппаратуры АУК -1М.
2.Состав аппаратуры и принцип действия аппаратуры АУК – 1М.
3.Назначение органов управления на пульте и блоке управления аппарату- ры АУК –1М.
Рекомендуемая литература
1.Справочник по автоматизации шахтного конвейерного транспорта / Стад- ник Н.И., Ильюшенко В.Г., Егоров С.И и др. - К.: Техника, 1992. - 438с.
2.Автоматизация производства на угольных шахтах / Г.И. Бедняк,
В.А.Ульшин, В.П. Довженко и др. - К.: Техника, 1989. - 272с.
3.Автоматизация процессов подземных горных работ /Под. ред. проф. А.А. Иванова. - К.: Донецк: Вища шк., 1987. - 328с.
4.Батицкий В.А., Куроедов В.И., Рыжков А.А. Автоматизация производст- венных процессов и АСУ ТП в горной промышленности. - М.: Недра
1991. - 303с.
48 |
29 |