

сортировка кр. лесомат
..pdf21
Поворотная рама опирается на два подшипника. Подшипники закреплены на стойках и позволяют поворачиваться раме в стороны сброски на 45°.
Рис. 10. Трехроликовая сбрасывающая секция Поворотная рама удерживается в исходном положении механизмом сбра-
сывания, состоящим из электрогидротолкателя 16, поворотного рычага 8 c защелкой 12 и роликом 14. При этом защелка 12 фиксирует хвостовик 10 поворотной рамы. При сбрасывании бревна электрогидротолкатель опускает защелку, а ролик 14, воздействуя на корпус хвостовика поворотной рамы, осуществляет предварительный ее наклон на угол 20-22°. Дальнейшей наклон рамы до 45° происходит за счет веса бревна.
При сброске тонкомерных лесоматериалов вес бревна может оказаться недостаточным для наклона рамы. С учетом этого, оси поворота рамы устанавливаются с некоторым эксцентриситетом относительно оси лесотранспортера в сторону, противоположную сброске. Для этого в местах крепления подшипников к раме имеются пазы.
Возврат рамы в исходное положение происходит под действием упругости ленты и противовеса 9. После отключения двигателя электрогидротолкателя шток его опускается под действием пружины 15, воздействующей на поворотный рычаг 8. Хвостовик поворотной рамы, возвращаясь на место, нажимает на скошенный конец защелки, поворачивая ее относительно оси 11. Защелка приподнимается, фиксируя хвостовик, под действием пружины.
Для сброски низкокачественных бревен и сортиментов, имеющих большую массу, после приемной секции устанавливаются четыре сбрасывающие секции, имеющие усиленные поворотные рамы.
Для сброски сортиментов длиной более 3,2 м сбрасывающие секции устанавливаются попарно. Например, для сброски сортиментов длиной 3,2-4,0 м

22
используют две двухроликовые секции, а для 6,0-6,5 м – две трехроликовые. Привод лесотранспортера (рис. 11) включает двигатель 5, соединенный с
редуктором 4 клиноременной передачей 6, ведущий барабан 3, футерованный лентой, два отклоняющих барабана 1 и натяжное устройство грузового типа. Натяжное устройство предотвращает проскальзывание ленты на ведущем барабане и состоит из натяжного барабана 11, закрепленного на подвижной раме 12, направляющих 10 и железобетонных грузов 7 общей массой 500 кг. Привод смонтирован на сварной раме 9 и закрыт ограждениями 2 и 8.
Рис. 11. Привод с механизмом натяжения
3.2. Система автоматического управления работой бревносбрасывателей ЦЛР-150
Система управления ЦЛР-150 предназначена для подачи команды на сбрасывание при ручной (некондиционные и тяжелые бревна) и автоматизиро-

23
ванной сортировке круглых лесоматериалов, Система включает в себя шариковый барабан заказов, путевые датчики в количестве двадцати трех штук, пульт и двенадцать блоков управления.
Барабан заказов (рис. 12) с редуктором 3 смонтирован на общем основании 1.
Рис. 12. Шариковый барабан заказов ЦЛР-150 Барабан заказов состоит из двух станин 6 с запрессованными в них под-
шипниками качения 5, служащими концевыми опорами вала 7. На валу на шпонках насажены двадцать литых дисков 8 с проточкой по ободу. На диски надеваются с натягом резиновые кольца 9, имеющие по ободу желобок. Внизу под дисками на двух подвесках 24 расположены десять электромагнитов 23. На двух других подвесках 17 под углом 20° к первым расположены еще десять электромагнитов 18. Наклонные и вертикально установленные электромагниты расположены в шахматном порядке. Каждый электромагнит снабжен питателем 22 для подачи шариков. В питатель снизу входит шток 21 с термически обработанным концом, связанный с якорем электромагнита. К питателям примыкают трубки 16 и 19, снабженные сверху съемниками 15. В каждой трубке находятся двадцать шариков 20.
Для увеличения жесткости конструкции служит средняя опора 11 с подшипником скольжения, расположенная между десятым и одиннадцатым дисками.
Между соседними дисками расположены дистанционные кольца 10. На кольцах закрепляются державки 13, по одной для каждого из смежных дисков. На каждой державке находится один микровыключатель 14 с рычагом, установленным над диском между ребордами резинового кольца. Для возможности регулировки положения микровыключателя относительно диска на конце каждой державки имеется прорезь.
Барабан закрывается сверху кожухом 12 и двумя боковыми кожухами 25. Вал 7 барабана с помощью дисковой муфты 4 соединяется с тихоходным валом редуктора 3. Редуктор представляет собой четырехступенчатую зубчатую передачу, составленную из четырех пар цилиндрических прямозубых колес. Пере-

24
даточное число редуктора i=136,97. На входном валу редуктора закреплена звездочка 2 цепной передачи, получающая вращение от ведомого барабана лесотранспортера.
Путевой датчик (рис. 13) служит для подачи команды на начало слежения за бревном (контрольный), либо включения, механизма сбрасывания при воздействии на него сортимента, подлежащего сброске.
Рис. 13. Путевой датчик Датчик состоит из сварного рычага 2, поворачивающегося с вертикальной
осью 1, которая вращается во втулке кронштейна 3. К плите этого кронштейна крепится путевой выключатель 4, с роликом которого взаимодействует кулачок 5, укрепленный на оси 1. Пружина 6, служащая для возвращения рычага в начальное положение, крепится одним концом к рычагу, а другим – к плите кронштейна через ось 7, перемещением которой регулируется усилие пружины,
Принципиальная электрическая схема лесотранспортера и системы управления бревнобрасывателями приведена на рис. 14.
Для подключения к внешнему источнику напряжения служит рубильник Q1. Автоматическими выключателями F1, F2, F3, F4, ... подается напряжение к магнитным пускателям лесотранспортера К1 и блоков управления К2, КЗ, К4,
.... Блоки управления E1-Е12 предназначены для включения двигателей электрогидротолкателей Y21-Y47.
Перед включением лесотранспортера кнопкой S93 подается звуковой сигнал. Для пуска лесотранспортера служит магнитный пускатель К1, управляемый кнопками S1 (пуск) и S2 (останов). В цепь катушки К1 включены конечный выключатель S3 блокировки ограждение привода и путевой датчик S4

25
автоматической остановки, расположенный в конце лесотранспортера. Датчик S4 необходим для отключения привода в случае прохождения сортиментом по каким-либо причинам всего фронта сортировки.
Рис. 14. Принципиальная электрическая схема лесотранспортера и системы управления бревносбрасывателями
Блок управления E1 предназначен для сброски некондиционных лесоматериалов и сортиментов, имеющих большой вес. Оператор сбрасывает их до поступления на фронт автоматической сортировки на сбрасывающих секциях, имеющих усиленные поворотные рамы, нажатием на пульте кнопок S6 и S7. Нажатием, например, на кнопку S6 включаются пускатель К2 и электрогидротолкатели Y21 и Y22, включенные параллельно. Сбрасывающие секции наклоняются и происходит сброска бревна в лесонакопитель Лампа накаливания Н21 предназначена для контроля и настройки управляющего сигнала (в нижнем по схеме положения тумблера S72), а в зимнее время – для обогрева блока (в верхнем положении тумблера S72).
Рассмотрим работу системы управления в автоматическом режиме. При подходе сортимента к кабине управления он оценивается оператором, который воздействует на выключатель (S8-S27) соответствующего места сброски до момента отклонения бревном флажка контрольного путевого датчика S5. При этом срабатывает электромагнит (Y1-Y20) барабана заказов и соответствующий толкатель забивает шарик между ребордами диска, а на пульте кратковременно вспыхивает лампочка НО. С этого момента шарик перемещается вместе c диском, копируя в определенном масштабе путь, проходимый бревном по лесотранспортеру. При подходе бревна примерно за 0,5 м к путевому датчику S94S113 шарик отклоняет рычажок микровыключателя S28-S47, который, замыкая свои контакты, подготавливает цепь включения магнитного пускателя К4, К5,
... электрогидротолкателей Y25-Y45. При этом на пульте загорается лампа H1H20, сигнализирующая о том, что команда на сброс подготовлена. При откло-
26
нении бревном рычага путевого датчика S94-S113 подается напряжение к электрогидротолкателям. Включение сбрасывающих секций возможно и непосредственно у места сброски при помощи выключателей S49, S50, S51, … .
Путевой датчик S48 служит для автосброса бревен, по каким-либо причинам прошедшим фронт автоматической сортировки.
4. ЛАБОРАТОРНАЯ РАБОТА 4. СОРТИРОВКА ЛЕСОМАТЕРИАЛОВ МАНИПУЛЯТОРАМИ
Содержание задания:
1)Изучить технологическую схему сортировочно-пакетирующей установки, обратив внимание на взаимное расположение ее элементов: манипулятор, питатель, накопители и промежуточные емкости. Уяснить, почему кольцевая схема расположения накопителей создает условия для автоматизации процесса сортировки-пакетирования, а также за счет чего обеспечивается автоматическое выравнивание торцов бревен в накопителях.
2)Установить, зависимость производительности (Псм.) манипулятора от среднего объема перемещаемой им пачки.
При расчете Псм. следует уяснить целесообразность размещения сортиментов в лесонакопителях по их убывающему выходу в направлении от питателя вправо и влево, а также уяснить порядок определения средневзвешенного угла поворота стрелы и среднего объема пачки.
Следует иметь в виду, что в расчете Псм. манипулятора, приведенном в качестве примера, сделаны следующие допущения:
-значения величин смыкания челюстей (с) и расстояния (h3) от захвата до бревна, находящегося на питателе, не зависят от среднего диаметра бревна;
-приняты равными углы поворота стрелы от питателя до ближнего накопителя и от промежуточной емкости до ближнего накопителя; возникающие при этих допущениях ошибки не превышают 0,5%.
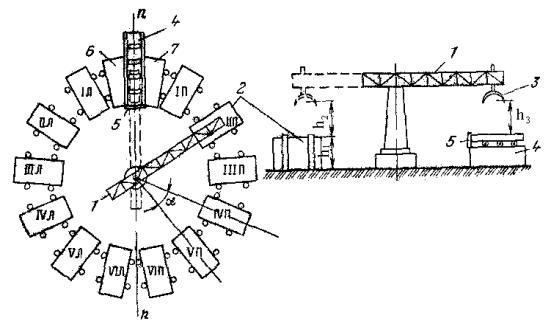
4.1. Технологическая схема сортировочно-пакетирующего участка с манипулятором
Производительность манипуляторов зависит от среднего объема сортиментов, поэтому их применение эффективно при сортировке крупномерных сортиментов или при одновременном захвате нескольких одноименных сортиментов малого объема. Целесообразно также, с целью сокращения времени цикла, исключить передвижение манипулятора.
Бревна на сортировку (рис. 15) подаются питателем 4, представляющим собой рольганг с ограничительным щитом 5 на конце. По обе стороны рольганга расположены промежуточные емкости 6 и 7, куда сбрасываются после выравнивания торцов о щит два вида сортиментов, имеющих набольший выход. Эти сортименты забираются из емкостей небольшими пачками. Остальные сортименты захватываются манипулятором 1 поштучно непосредственно на питателе.
27
Рис. 15. Схема сортировочно-пакетирующего участка с манипулятором Манипулятор сортировочной установки обслуживает 12 лесонакопителей
(2). Шесть лесонакопителей IП-VIП расположены справа от оси п-n, другие шесть IЛ-VIЛ – слева. Лесонакопители размещены по окружности на равном расстоянии друг от друга и имеют одинаковую ширину.
В исходном положении стрела манипулятора находится над питателем, захват 3 поднят с полностью раскрытыми челюстями.
Поскольку передние торцы всех бревен выравниваются по ограниченному щиту 5, а клещевой захват не передвигается вдоль оси стрелы, то любой сортимент, находящийся на питателе или в емкости, захватывается челюстями на одинаковом расстоянии от его переднего торца. Благодаря этому обеспечивается автоматическое выравнивание торцов бревен при укладке их в лесонакопители.
Другой особенностью данной технологической схемы является автоматизация процесса сортировки-пакетирования, что обусловлено постоянством взаимного расположения манипулятора, питателя и лесонакопителей, а также возможностью контроля и фиксации угла поворота манипулятора и величины вертикальных перемещений клещевого захвата.
Оператор вводит в систему автоматического управления информацию о месте захвата груза (питатель или номер промежуточной емкости) и месте его укладки (номер лесонакопителя), а все остальные операции выполняются автоматически.
Автоматизированный манипулятор имеет три механизма, работающие в автоматическом режиме: подъем и опускание захвата, смыкание и размыкание челюстей, вращения стрелы. Первые два имеют гидравлический привод, а повороты стрелы осуществляются от реверсивного электродвигателя, приводящего во вращение опорную колонну (рис. 15) вместе со стрелой.
Электрогидравлическая схема системы автоматического управления работой манипулятора приведена на рис. 16.
Рабочая жидкость из бака 1 насосом 2 подается в напорную магистраль 4,

28
по которой через распределители 5, 7, 9 и 11 поступает соответственно к гидроцилиндрам 6 (подъем и опускание захвата), 8 (смыкание и размыкание челюстей), 10 и 12 (сбрасывание бревен с питателя в правую и левую промежуточные емкости). Для переключения распределителей 5, 7, 9 и 11 служат электромагниты соответственно Y1 и Y2, Y3 и Y4, Y5 и Y6.
По сливной магистрали 13 рабочая жидкость поступает обратно в бак. Давление рабочей жидкости измеряется манометром 3.
Рис. 16. Электрогидравлическая схема манипулятора
4.2. Научно-исследовательский раздел лабораторной работы 4
Сменная производительность (Псм.) манипулятора на сортировкепакетировании определяется по формуле
Псм. = |
Тсм. 3600 ϕ V |
, |
(8) |
|
Т |
||||
|
|
|
где Тсм. – число часов работы в смену; ϕ – коэффициент использования рабочего времени;
V – средний объем пачки, перемещаемой манипулятором, м3; Т – время цикла на подачу в лесонакопитель одной пачки, с.
Время цикла складывается из отрезков времени на выполнение следующих операций: Т1 – опускание захвата на бревно, лежащее на питателе; Т2 – смыкание челюстей; Т3=Т1 – подъем захвата с бревном; Т4 – поворот стрелы от положения над питателем в положение над заказанным лесонакопителем; Т5 – опускание бревна в лесонакопитель; Т6=Т2 – размыкание челюстей; Т7=Т5 – подъем захвата; Т8=Т4 – поворот стрелы в исходное положение; Тавт. – время на срабатывание элементов системы автоматического управления.
Отсюда следует, что время цикла можно записать в виде
Т = 2 (Т1 +Т2 +Т4 +Т5 )+Тавт. . |
(9) |
Величины, входящие в выражение (9), определяются по формулам:
Т1 |
= |
h3 |
, |
(10) |
|
||||
|
V |
|
|
|
|
1 |
|
|
|

29
где h3 – расстояние от захвата до бревна среднего диаметра (d на питателе, м;
V1 – скорость подъема и опускания захвата, м/с.
Т2 = Vс2 ,
ср.), находящегося
(11)
где с – величина смыкания челюстей при захвате бревна dср., м; V2 – скорость смыкания и размыкания челюстей, м/с.
Т4 = 60 ωαср. ,
где αср. – средневзвешенный угол поворота манипулятора, рад; ω – угловая скорость вращения манипулятора, об./мин.
Т5 |
= |
h1 +2 h2 |
, |
2 V |
|||
|
|
1 |
|
(12)
(13)
где h1 – высота полностью загруженного лесонакопителя, м;
h2 – расстояние от захвата до верхнего уровня бревен в заполненном лесонакопителе, м.
Тавт. = n tавт. , |
(14) |
где n – число операций, выполняемых манипулятором за один цикл;
tавт. – среднее время на срабатывание воспринимающих, передающих и исполнительных элементов САУ при выполнении одной операции, с.
В таблице 5 приведены величины, входящие в выражения (10)-(13), численные значения которых изменяются в различных вариантах. Номер варианта берется по последней цифре зачетной книжки.
Из таблицы видно, что сортименты в лесонакопителях размещены по их убывающему выходу в направлениях вправо и влево от питателя, что делается с целью уменьшения продолжительности цикла.
Постоянные значения имеют следующие величины: ход челюстей захвата с=0,3 м; число операций за один цикл n=8; среднее время на срабатывание элементов САУ tавт.=0,15 с; высота полностью загруженного лесонакопителя h1=2 м; расстояние от захвата до бревна на питателе (h3) или до верхнего уровня бревен в лесонакопителе (h2) h2=h3=0,6 м; коэффициент использования рабочего времени ϕ=0,85; число часов работы в смену Тсм.=7 часов.
В качестве примера рассмотрим вариант для бревен со средним объемом
0,12 м3. Дано:
-среднее число бревен, одновременно забираемых из промежуточных емкостей, шт. – 3;
-скорость подъема и опускания захвата, м/с – 0,25;
-скорость смыкания и размыкания челюстей, м/с – 0,05;
-число лесонакопителей, шт. – 12;
-центральный угол между осями соседних лесонакопителей, град. – 2;
-частота вращения стрелы, об./мин. – 2;
-распределение бревен по лесонакопителям, %:
|
Правая |
половина |
|
Левая половина |
||||||||
IП |
IIП |
IIIП |
|
IVП |
VП |
VIП |
IЛ |
IIЛ |
IIIЛ |
IVЛ |
VЛ |
VIЛ |

30
20 |
|
|
|
10 |
|
|
6 |
|
4 |
|
2 |
|
2 |
25 |
13 |
|
8 |
|
|
4 |
|
|
3 |
|
3 |
||||||
- углы поворота манипулятора, град: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Номер ле- |
|
IП |
|
IIП |
IIIП |
|
IVП |
VП |
|
VIП |
IЛ |
IIIЛ |
IIЛ |
|
IVЛ |
|
VЛ |
VIЛ |
|||||||||||||
сонакопи- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
теля |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Значение |
|
27 |
|
54 |
81 |
|
108 |
135 |
|
162 |
27 |
54 |
81 |
|
108 |
|
|
135 |
162 |
||||||||||||
угла |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
В соответствии с процентным распределением сортиментов по лесонако- |
|||||||||||||||||||||||||||
пителям средневзвешенное значение угла поворота стрелы манипулятора |
|
||||||||||||||||||||||||||||||
α |
ср. |
= |
27 (20 + 25)+54 (10 +13) |
+81 (6 +8)+108 (4 + 4)+135 (2 +3)+162 (2 +3) |
= |
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= 59,4о |
или 1,04 рад. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Подставляя численные значения величин, входящих в выражения (10)- (14), будем иметь:
Т1 = 00,,256 = 2,4 с;
Т2 = 00,05,3 = 6 с;
Т4 |
= |
60 1,04 |
= 5 с; |
|
|
||||
|
|
2 6,28 |
||
Т5 |
= |
2 + 2 0,6 |
= 0,4 с; |
|
|
||||
|
|
2 0,25 |
||
Тавт. |
= 8 0,15 =1,2 с . |
|||
Подставляя значения величин, входящих в выражение (9), определяем продолжительность цикла:
Т = 2 (2,4 +6 +5 +6,4)+1,2 = 40,8 с.
Определим средний объем (V) перемещаемой пачки, учитывая, что из промежуточных емкостей сортименты пачками по три штуки перекладываются в ближайшие к ним лесонакопители (IП и IЛ), в которые поступает 45% всех сортиментов, а в остальные лесонакопители поступает 55%:
V = |
45 3 0,12 +55 0,12 |
= 0,23 м3 . |
|
100 |
|||
|
|
Тогда сменная производительность манипулятора (выражение 8) будет:
Псм. = 7 3600 0,85 0,23 =121 м3 / смену. 40,8