

Теоретическая механика
.pdf11
По результатам расчета выполнить схему, на которой в осях xy изобразить траекторию точки, указать положение точки на траектории в заданный момент времени, а также, соблюдая пропорции, вычертить векторы найденных скоростей и ускорений. Необходимые для решения данные приведены в таблице 4.
Таблица 4 – Исходные данные для решения задачи К1
Уравнения движения
x
М
x
o |
y |
y |
Номер |
x = f(t) |
y = f(t) |
|
варианта |
|||
|
|
||
00 |
2t + 3 |
-5t |
|
01 |
4cos2(πt/3) + 2 |
sin2(πt/3) |
|
02 |
-cos(πt2/3) + 3 |
sin(πt2/3) – 1 |
|
03 |
4t + 4 |
-4/(t + 1) |
|
04 |
2sin(πt/3) |
-3cos(πt/3) + 4 |
|
05 |
3t2 + 2 |
-4t |
|
06 |
3t2 – t + 1 |
5t2 – 5t/3 – 2 |
|
07 |
7sin(πt2/6) + 3 |
2 – 7cos(πt2/6) |
|
08 |
-3/(t + 2) |
3t + 6 |
|
09 |
-5t2 – 4 |
3t |
|
10 |
6sin(πt2/6) – 2 |
6cos(πt2/6) + 3 |
|
11 |
3 – 3t2 + 1 |
4 – 5t2 + 5t/3 |
|
12 |
-6t |
-2t2 – 4 |
|
13 |
-3 – 9sin(πt2/6) |
-9cos(πt2/6) + 5 |
|
14 |
5t2 + 5t/3 – 3 |
3t2 + t + 3 |
|
15 |
6cos(πt/6) – 3 |
12sin(πt/6) |
|
16 |
4 – 2t |
2 – 3t2 |
|
17 |
-5cos(πt/3) |
-3sin(πt/3) – 4 |
|
18 |
-8t2 – 3 |
-5t |
|
19 |
5sin2(πt/6) |
-5cos2(πt/6) – 3 |
|
20 |
3cos(πt2/3) |
-3sin(πt2/3) |
|
21 |
-7t– 7 |
-9/(t + 1) |
|
22 |
6cos(πt/3) |
-3sin(πt/3) |
|
23 |
12t |
4t2 + 1 |
|
24 |
7sin2(πt/6) – 9 |
7cos2(πt/6) |
|
25 |
1 + 9cos(πt2/3) |
9sin(πt2/3) + 3 |
Номер |
x = f(t) |
y = f(t) |
|
варианта |
|||
|
|
||
50 |
-4cos(πt/3) |
-2sin(πt/3) – 3 |
|
51 |
-4t2 + 1 |
-3t |
|
52 |
5sin2(πt/6) |
-5cos2(πt/6) – 3 |
|
53 |
5cos(πt2/3) |
-5sin(πt2/3) |
|
54 |
-2t – 2 |
-2/(t + 1) |
|
55 |
4cos(πt/3) |
-3sin(πt/3) |
|
56 |
3t |
4t2 + 1 |
|
57 |
7sin2(πt/6) – 5 |
7cos2(πt/6) |
|
58 |
1 + 3cos(πt2/3) |
3sin(πt2/3) + 3 |
|
59 |
2 – 3t – 6t2 |
3 – 3t/2 – 3t2 |
|
60 |
7t2 – 3 |
5t |
|
61 |
-4cos(πt/3) – 1 |
-4sin(πt/3) |
|
62 |
8cos2(πt/6) + 2 |
-8sin2(πt/6) – 7 |
|
63 |
-4t2 + 1 |
-3t |
|
64 |
2cos(πt2/3) – 2 |
-2sin(πt2/3) + 3 |
|
65 |
t – 4 |
2t2 + 2 |
|
66 |
8sin(πt/6) – 2 |
6cos(πt/6) |
|
67 |
3t + 5 |
-7t |
|
68 |
6cos2(πt/3) + 4 |
2sin2(πt/3) |
|
69 |
-cos(πt2/3) + 3 |
sin(πt2/3) – 1 |
|
70 |
5t + 5 |
-6/(t + 1) |
|
71 |
4sin(πt/3) |
-3cos(πt/3) + 5 |
|
72 |
9t2 + 2 |
-4t |
|
73 |
3t2 – t + 4 |
5t2 – 5t/3 – 6 |
|
74 |
3sin(πt2/6) + 5 |
2 – 5cos(πt2/6) |
|
75 |
-5/(t + 2) |
3t + 6 |

12 |
|
|
|
|
x |
|
|
|
|
|
М |
Уравнения движения |
x |
|
|
|
o |
y |
y |
Номер |
x = f(t) |
y = f(t) |
|
варианта |
|||
|
|
||
26 |
6 – 3t – 6t2 |
9 – 3t/2 – 3t2 |
|
27 |
4t2 – 3 |
5t |
|
28 |
-4cos(πt/3) – 3 |
-4sin(πt/3) |
|
29 |
8cos2(πt/6) + 3 |
-8sin2(πt/6) – 6 |
|
30 |
-4t2 + 3 |
-2t |
|
31 |
3cos(πt2/3) – 4 |
-3sin(πt2/3) + 5 |
|
32 |
T – 5 |
3t2 + 2 |
|
33 |
7sin(πt/6) – 2 |
5cos(πt/6) |
|
34 |
2t2 + 5 |
-4t |
|
35 |
3cos2(πt/3) + 1 |
sin2(πt/3) |
|
36 |
-cos(πt2/3) + 5 |
sin(πt2/3) – 2 |
|
37 |
3t + 3 |
-5/(t + 1) |
|
38 |
3sin(πt/3) |
-4cos(πt/3) + 4 |
|
39 |
5t2 + 2 |
-3t |
|
40 |
3t2 – t + 1 |
4t2 – 4t/3 – 5 |
|
41 |
7sin(πt2/6) + 2 |
1 – 7cos(πt2/6) |
|
42 |
-5/(t + 2) |
3t + 6 |
|
43 |
-5t2 – 4 |
9t |
|
44 |
5sin(πt2/6) – 2 |
5cos(πt2/6) + 3 |
|
45 |
3 – 3t2 + 1 |
7 – 5t2 + 5t/3 |
|
46 |
-5t |
-3t2 – 4 |
|
47 |
-3 – 4sin(πt2/6) |
-4cos(πt2/6) + 5 |
|
48 |
5t2 + 5t/3 – 4 |
3t2 + t + 2 |
|
49 |
6cos(πt/6) – 3 |
9sin(πt/6) |
Номер |
x = f(t) |
y = f(t) |
|
варианта |
|||
|
|
||
76 |
-7t2 – 4 |
3t |
|
77 |
6sin(πt2/6) – 5 |
6cos(πt2/6) + 4 |
|
78 |
4 – 3t2 + t |
6 – 5t2 + 5t/3 |
|
79 |
-7t |
-3t2 – 4 |
|
80 |
-3 + 7sin(πt2/6) |
7cos(πt2/6) + 5 |
|
81 |
5t2 + 5t/3 – 4 |
3t2 + t + 5 |
|
82 |
4cos(πt/6) – 3 |
8sin(πt/6) |
|
83 |
5 – 2t |
1 – 3t2 |
|
84 |
-3cos(πt/3) |
-2sin(πt/3) – 3 |
|
85 |
-3t2 + 1 |
-4t |
|
86 |
5sin2(πt/6) |
-5cos2(πt/6) – 2 |
|
87 |
2cos(πt2/3) |
-2sin(πt2/3) |
|
88 |
-3t – 3 |
-2/(t + 1) |
|
89 |
3cos(πt/3) |
-4sin(πt/3) |
|
90 |
3t |
5t2 + 1 |
|
91 |
6sin2(πt/6) – 5 |
6cos2(πt/6) |
|
92 |
1+4cos(πt2/3) |
4sin(πt2/3) + 3 |
|
93 |
5 – 3t – 6t2 |
3 – 3t/2 – 3t2 |
|
94 |
7t2 – 5 |
4t |
|
95 |
-4cos(πt/3) – 3 |
-4sin(πt/3) |
|
96 |
9cos2(πt/6) + 2 |
-9sin2(πt/6) – 7 |
|
97 |
-4t2 + 3 |
-2t |
|
98 |
2cos(πt2/3) – 3 |
-2sin(πt2/3) + 5 |
|
99 |
t – 4 |
3t2 + 2 |
4.5 Задача К2. Кинематический анализ многозвенного механизма
Кривошип О1А вращается с постоянной угловой скоростью ωО1А = 3 рад/с. Определить для заданного положения механизма скорости
точек А, В, С, D … механизма, угловые скорости всех его звеньев, а также ускорение точек А, В и угловое ускорение звена АВ. Схемы механизмов показаны на рисунке 4, значения угла поворота кривошипа φ, в соответствие которому должен быть построен механизм, приведены в таблице 5.

|
|
|
|
13 |
|
|
0 |
|
|
В |
1 |
|
|
|
|
|
А |
|
С |
|
|
|
|
|
|
||
|
|
|
K |
О1 |
|
В |
|
|
|
|
|
||
|
С |
|
|
|
|
|
|
|
|
|
|
D |
|
|
а |
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
О2 |
|
|
|
|
|
|
|
|
|
|
|
О2 |
|
|
|
А |
|
|
|
а |
|
|
c |
|
E |
|
|
||
|
О1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E |
2 О3 |
|
|
D |
3 |
D |
С |
|
|
|
|
E |
О2 |
|
|
c |
d |
|
|
|
|
|
|
С |
|
|
||
|
|
|
|
|
||
|
|
|
|
|
|
|
|
О2 |
|
|
а |
|
|
|
|
|
|
|
|
c |
|
|
|
В |
А |
|
|
а |
|
|
|
О1 |
|
|
|
|
|
|
|
|
|
|
А |
|
О1 |
|
|
В |
|
|
|
|
|
|
|
4 |
А |
|
С |
5 |
|
E |
|
|
|
В |
|
|
|
О1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В |
|
|
а |
c |
|
|
|
|
|
|
|
|
|
|
|
D |
|
О2 |
А |
|
С |
|
|
|
|
О1 |
О2 |
D |
|
|
|
F |
|
||
|
E |
|
L |
|
|
|
|
|
|
|
|
||
|
|
|
|
а |
|
|
Рисунок 4 |
|
|
|
|
|
|

|
|
14 |
6 |
|
|
|
О3 |
|
D |
|
а |
|
|
c |
|
|
А |
C |
|
О1 |
|
|
|
|
B |
|
|
|
О2 |
8 |
а |
|
|
|
|
|
|
О2 |
В |
|
|
С |
D |
F |
|
|
|
|
А |
|
О1 |
c |
|
|
|
|
Окончание рисунка 4 |
|
|
7 |
|
|
|
E |
|
F |
|
О2 |
|
|
|
|
|
D |
|
а |
|
|
А |
|
О1 |
C |
B |
|
9 |
|
|
E |
B |
|
О2 |
|
D |
d |
C |
F |
|
|
|
c |
|
О1 |
А |
|
а |
|
15
Расстояния между осями a, b, с, … и размеры звеньев О1А, АВ, О2В, и т. д., необходимые для построения механизма, измерить на схеме с учетом масштаба 1:10. Необходимые для вычисления скоростей и ускорений расстояния и значения углов также измерить на схеме вычерченной, в самостоятельно выбранном масштабе, в соответствии с заданным значением угла поворота кривошипа.
Таблица 5 – Значения угла поворота кривошипа для задачи К2
Номер условия |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
|
|
|
|
|
|
|
|
|
φ |
0о |
15о |
30о |
45о |
60о |
75о |
90 |
120 |
135 |
150о |
|
|
|
|
|
|
|
|
|
|
|
4.6 Задача К3. Определение абсолютной скорости и абсолютного ускорения точки совершающей сложное движение
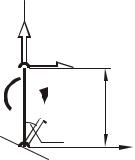
Прямоугольная пластина или круглая пластина радиуса R = 60 см (рисунок 5) вращается вокруг неподвижной оси по закону φ = f1(t) (φ выражено в радианах, t – в секундах) заданному в таблице 6. Положительное направление отсчета угла φ показано на рисунке дуговой стрелкой. На схемах 0, 1, 2, 5, 6 ось вращения перпендикулярна плоскости пластины и проходит через точку О (пластина вращается в своей плоскости); на схемах 3, 4, 7, 8, 9 ось вращения ОО1 лежит в плоскости пластины (пластина вращается в пространстве).
По пластине вдоль прямой BD (схемы 0–4) или по окружности радиуса R (схемы 5–9) движется точка М; закон её относительного движения, т. е. зависимость s = АМ = f2(t) (s выражено в сантиметрах, t – в секундах), задан в таблице 6 отдельно для схем 0–4 и для схем 5–9; там же даны размеры b и l. На схемах точка М показана в положении, при котором s = АМ > 0 (при s < 0 точка М находится по другую сторону от точки А).
Найти абсолютную скорость и абсолютное ускорение точки М в момент времени t1 = 1 с.

|
|
|
|
16 |
0 D |
s |
|
B |
1 |
M |
A |
|||
4b |
|
|
|
|
|
O |
|
|
|
2 |
|
B |
|
3 |
|
|
|
|
|
|
O |
A |
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
D |
|
|
4 |
O1 |
D |
|
5 |
|
|
M |
|
|
|
A |
s |
|
|
|
B 60о |
|
|
|
|
O |
|
|
|
6 |
1,5 ll |
D M |
|
7 |
|
|
s |
|
|
|
|
|
|
|
|
O |
R |
A |
|
8 |
A |
s |
|
9 |
|
|
|||
|
R |
M |
|
|
|
|
|
|
|
|
|
D |
|
|
2l |
|
|
|
|
|
O |
|
O1 |
|
|
|
|
|
|
5b |
2 |
|
|
D |
45о |
s |
M |
|
||
|
|
|
|
A |
b |
45о |
|
O |
|
|
B
O1 
 D
D
30о M  s
s
A
O 
 B
B
|
|
R |
|
|
D |
|
s |
|
|
M |
|
|
|
|
|
A |
|
l |
|
|
|
|
,15 |
|
|
|
|
|
|
|
|
O |
|
|
O1 |
|
2l |
|
|
|
|
|
|
|
|
A |
|
R |
|
|
s |
|
|
|
|
|
|
|
|
O |
|
M |
D |
|
|
|
|
||
|
|
|
|
|
O1 |
|
D |
|
|
|
|
M |
s |
|
|
|
|
||
|
|
|
|
|
|
|
|
R |
A |
1,1,5l l
O 

Рисунок 5
17
Таблица 6 – Исходные законы переносного движения тела и относительного движения точки для задачи К3
Номер |
Для всех |
|
Для схем 0–4 |
|
Для схем 5–9 |
||
|
|
|
|
|
|
||
условия |
схем φ = f1(t) |
b, см |
|
s = АМ = f2(t) |
l |
|
s = АМ = f2(t) |
|
|
|
|
||||
|
|
|
|
|
|
|
|
0 |
4(t2 – t) |
12 |
|
50(3t – t2) – 64 |
R |
|
πR(4t2 – 2t3)/3 |
1 |
3t2 – 8t |
16 |
|
40(3t2 – t4) – 32 |
4R/3 |
|
πR(2t2 – t3)/2 |
2 |
6t3 – 12t2 |
10 |
|
80(t2 – t) +40 |
R |
|
πR(2t2 – 1)/3 |
3 |
t2 – 2t3 |
16 |
|
60(t4 – 3t2) + 56 |
R |
|
πR(3t – t2)/6 |
4 |
10t2 – 5t3 |
8 |
|
80(2t2 – t3)– 48 |
R |
|
πR(t3 – 2t)/3 |
5 |
2(t2 – t) |
20 |
|
60(t3 – 2t2) |
R |
|
πR(t3 – 2t)/6 |
6 |
5t – 4t2 |
12 |
|
40(t2 – 3t)+32 |
3R/4 |
|
πR(t3 – 2t2)/2 |
7 |
15t – 3t3 |
8 |
|
60(t – t3)+24 |
R |
|
πR(t – 5t2)/6 |
8 |
2t3 – 11t |
10 |
|
50(t3 – t)-30 |
R |
|
πR(3t2 – t)/3 |
9 |
6t2 – 3t3 |
20 |
|
40(t – 2t3)-40 |
4R/3 |
|
πR(t – 2t2)/2 |
Список литературы
1Яблонский, А. А. Курс теоретической механики : учебник в 2 ч. / А. А. Яблонский, В. А. Никифорова. – М. : Высш. шк., 1986. – Ч. 1. – 427 с. : ил.
2Яблонский, А. А. Курс теоретической механики : учебник в 2 ч. / А. А. Яблонский, В. А. Никифорова. – М. : Высш. шк., 1986. – Ч. 2. – 447 с. : ил.
3Тарг, С. М. Краткий курс теоретической механики / C. М. Тарг. –
М. : Высш. шк., 2002. - 416 с.
4Бутенин, Н. В. Курс теоретической механики : в 2 т. / Н. В. Бутенин, Я. Л. Лунц, Д. Р. Меркин. – СПб. : Лань, 1998.
5Игнатищев, Р. М. Курс теоретической механики. Введение, статика, кинематика, динамика : учеб. пособие / Р. М. Игнатищев, П. Н. Громыко, С. Н. Хатетовский. – Минск : Технопринт, 2004. – 430 с. : ил.
6Мещерский, И. В. Сборник задач по теоретической механике : учеб. пособие / И. В. Мещерский. – М. : Наука, 1986. – 448 с. : ил.
7Сборник коротких задач по теоретической механике : учеб. пособие для втузов / О. Э. Кепе [и др.] ; под ред. О. Э. Кепе. – М. : Высш. шк., 1989. – 368 с. : ил.
8Сборник заданий для курсовых работ по теоретической механике : учеб. пособие для техн. вузов / А. А. Яблонский [и др.] ; под ред. А. А. Яб-
лонского. – М. : Высш. шк., 1985. – 367 с. : ил.

18
Приложение А
(рекомендуемое)
Примеры выполнения контрольных заданий
Задача С1.
Дана схема (рисунок А.1) находящейся в равновесии рамы.
F1 = 300 H, F2 = 400 H, M = 250 H м, q = 80Н/м, α = 30о, β = 75о, а = 0,5 м.
Определить реакции опор рамы.
F1 |
4a |
q |
|
3a |
M |
|
ВА
F2
2a
6a
Рисунок А.1
Решение
Применяя принцип освобождаемости от связей рассмотрим равновесие рамы. Покажем действующие на раму (рисунок А.2) активные силы и реакции связей. Распределенную нагрузку заменим равнодействующей
Q = q 4a = 80 4 0,5 = 160 H,
точка приложения которой будет находиться посередине участка, на котором действует нагрузка.
|
y |
|
Q |
2a |
|
F1 |
|
|
|||
|
|
||||
|
30О |
|
M |
||
3a |
|
|
|||
RB |
|
|
YA |
||
|
|
|
|||
|
В |
|
|
А |
|
|
|
|
6a |
||
|
|
|
|
|
|
F2
 75О
75О
2a
XA x
Рисунок А.2
Для полученной плоской системы сил составляем три уравнения равновесия:
Σ FiX = 0, |
XA – F1 cos 30о + F2 cos 75o = 0; |
(1) |
Σ FiY = 0, |
RB + YA + F1sin30о + F2 sin 75о – Q = 0; |
(2) |

19
Σ MiA = 0, – RB 6a + F1 cos 30о 3a – F1 sin 30о 6a –
– F2 cos 75о 2a + Q 2a + M = 0. |
(3) |
Подставляя численные значения величин входящих в составленные уравнения, последовательно определяем:
Из уравнения (1)
XA = F1 cos 30о – F2 cos 75o = 300 0,87 – 400 0,26 = 157 Н.
Из уравнения (3)
RB = 6a1 (–3a F1cos30о + 6a F1sin30о + 2a F2cos75о – 2a Q – M) =
= |
1 |
(3 0,5 300 0,87 – 6 0,5 300 0,5 – 2 0,5 400 0,26 + |
6 0,5 |
+ 2 0,5 160 + 250) = 82,5 Н.
Из уравнения (2)
YA = – RB – F1sin30о – F2sin75о + Q = – 82,5 – 300 0,5 – 400 0,97 + + 160 = –460,5 Н.
Ответ: XA = 157 Н, YA = – 460 Н, RВ = 82,5 Н. Знак «–» в значении
YA указывает на то, что истинное направление реакции противоположно указанному на чертеже.
Задача С2.
Дана схема (рисунок А.3) находящейся в равновесии составной кон-
струкции. F1 = 450 H, F2 = 500 H, M = 300 H м, q = 120 Н/м, α = 45о, β = 60о,
а = 0,5 м. Определить реакции опор А и В и усилие в соединении С.
|
|
4a |
|
F1 |
|
q |
|
|
|
С |
|
|
|
|
|
|
|
F2 |
M |
2a |
|
3a |
|
А |
|
||
|
|
В |
|
|
|
6a |
30О |
|
|
|
|
|
|
Рисунок А.3 |
|
Решение
Для определения реакций опор и усилия в соединении мысленно расчленяем систему на две части.
Сначала рассмотрим равновесие стержня ВС. Покажем действующие
20
на стержень активный момент пары сил М (рисунок А.4), реакцию шар- нирно-подвижной опоры В (RB) и усилие в соединении С в виде двух вза- имно-перпендикулярных составляющих XC и YC.
Для полученной плоской системы сил составляем три уравнения равновесия:
Σ FiX = 0, |
XC + RB sin 30o = 0; |
(1) |
Σ FiY = 0, |
YC + RB cos 30o = 0; |
(2) |
Σ MiC = 0, RB sin 30o 3a – M = 0. |
(3) |
|
Подставляя численные значения величин входящих в составленные уравнения, последовательно определяем.
y 
YС
С XС
M 


 RB
RB
30О
В
3a
x
Рисунок А.4
Из уравнения (3)
RB = М / (3a sin 30o) = 300/(3 0,5 0,5) = 400 Н.
Из уравнения (1)
XC = –RB sin 30o = –400 0,5 = –200 Н.
Из уравнения (2)
YC = –RB cos 30o = –400 0,87 = –348 Н.
Теперь рассмотриваем равновесие угольника АС. На него (рисунок А.5) действуют две активные силы F1 и F2 и равномерно распределенная нагрузка интенсивностью q, которую заменим равнодействующей
Q = q 4a = 120 4 0,5 = 240 H,
приложенной посередине участка на котором действует нагрузка. Реакцию жесткой заделки изображаем в виде двух составляющих XA и YA и пары сил с моментом МА, а также в соединительном шарнире С следует показать, что со стороны стержня на угольник будут действовать такие же силы XC и YC как и со стороны угольника на стержень только направленные в