

Метода 12
.pdfМинистерство образования Республики Беларусь
Белорусско – Российский университет
Кафедра “Электропривод и автоматизация промышленных установок “
Э
П
А 
 П
П
 У
У
Методические указания к проведению лабораторных работ по курсу “Элементы автоматизированного электропривода”
Цикл 3
Элементы автоматизированного электропривода переменного тока
Часть 1
Лабораторная работа №12
“Изучение тиристорного преобразователя частоты типа ЭКТ2Д (технические характеристики и силовая часть)”
Могилев, 2005
Составители: проф. Парфенович О. Н. асс. Максимович М. С.
Лабораторная работа №12 по курсу "Элементы автоматизированного электропривода". Цикл 3.
Элементы автоматизированного электропривода переменного тока. Часть I. Методические указания. Могилев: Белорусско–Российский университет, 2005.
В методических указаниях излагаются цели работы, описание схемы электрической принципиальной, устройство, порядок выполнения, прилагаются контрольные вопросы.
ЦИКЛ 3. ЭЛЕМЕНТЫ АВТОМАТИЗИРОВАННОГО ЭЛЕКТРОПРИВОДА ПЕРЕМЕННОГО ТОКА. Часть I
1. Элементы автоматизированного электропривода переменного тока.
Общие сведения об исследуемом электроприводе ЭКТ2Д (Электропривод комплектный, тиристорный, второй модификации с динамическим торможением).
1.1 Назначение электропривода.
1.1.1Электроприводы ЭКТ2 и ЭКТ2Р предназначены для управления электродвигателями переменного тока типа ВА0, 4А и других типов.
1.1.2. Электроприводы предназначены для работы в закрытых помещениях при следующих условиях:
1)диапазон рабочих температур от +10С до 400С;
2)окружающая среда не пожароопасная, не взрывоопасная, содержание не токопроводящей пыли не более 0,5 мг/м3, атмосфера промышленных предприятий;
3)оболочки шкафов электроприводов обеспечивают степень защиты
IP23;
4)показатели качества электрической энергии для питания электроприводов следующие: отклонение напряжение сети переменного тока от номинального значения +10 %, -15 %; отклонение частоты сети переменного тока от номинальной в пределах ±2 %; коммутационные провалы и всплески в кривой натяжения площадью не более 400 % эл. град. с длительностью не более 40 эл. град.
1.2 Технические данные.
1.2.1Технические данные электроприводов приведены в таблице
1.1.
1.2.2В электроприводе предусмотрена возможность дистанционного управление выключателем (пускателем), включенным
всиловые цепи, а также управление частотой выходного напряжения (скоростью двигателя).
1.2.3Электроприводы обеспечивают:
1) регулирование выходного напряжения до номинального значения но не выше напряжения питающей сети в функции частоты по закону:
U/f=1.7÷7.6 при fном=200 Гц,
U/f=4.0÷7.6 при fном=50 Гц,
где U – действующее значение выходного напряжения; f – выходная частота.
2)Работу с током 1,5I ном. в течение 120 с, где Iном – номинальный ток преобразователя.
3)Пуск, торможение, реверс электродвигателя;
4)Работу с номинальным током на нагрузку, имеющую коэффициент
сдвига (0,15-0,9) при fном = 50 Гц и (0,15-0,7) при fном = 200 Гц.
Таблица 1.1 – технические данные электроприводов.
|
|
Наименование параметров |
2КТ2Д - |
|
|
25/380-50 |
|
|
|
|
УХЛЧ |
|
|
Параметры питающей сети |
|
1 |
Напряжение, В |
380 |
|
2 |
Частота, Гц |
50, 60 |
|
3 |
Количество фаз |
3 |
|
|
|
Выходные параметры |
|
4 |
Номинальное напряжение, В |
380 |
|
5 |
Номинальный ток, А |
25 |
|
6 |
Номинальная мощность, кВт |
16,5 |
|
7 |
Номинальная частота, Гц |
50 |
|
8 |
Диапазон изменения частоты, Гц |
1÷60 |
|
9 |
Диапазон изменения напряжения при номинальной нагрузке, В |
0÷380 |
|
10 |
Рабочий диапазон изменения частоты, Гц |
5÷60 |
|
11 |
Рабочий диапазон изменения напряжения при рекуперации, В |
38÷340 |
|
12 |
Коэффициент полезного действия не менее |
0,9 |
|
13 |
Коэффициент мощности не менее |
0,83 |
|
14 |
Коэффициент сдвига нагрузки |
0,15÷0,9 |
|
15 |
Отклонение выходного напряжение от номинального |
2,5 |
|
значения при изменении тока нагрузки от 0,1*Iном до Iном, % |
0,5 |
||
16 |
Отклонение выходной частоты от номинального значения, % |
||
17 |
Допустимая нагрузка в процентах от номинального тока |
150 |
|
18 |
Продолжительность допустимой нагрузки, с |
120 |
|
19 |
Мгновенное значение тока нагрузки не более, А |
50 |
|
Допускается изменение частоты до 80 Гц для рольганговых двигателей.
1.3. Состав изделия
1.3.1.В состав электропривода входят:
1)шкаф электропривода;
2)устройство дистанционного управления (по требованию заказчика);
3)внешний цифровой задающий генератор (по требованию заказчика);
4)электродвигатель (по требованию заказчика);
5)запасные части, инструмент и принадлежности согласно ведомости.
1.3.2Все основные элементы схемы управления, защиты, сигнализации, системы регулирования размещены на платах системы управления. Платы системы управления ( 4 платы)установлены на поворотной раме, на внутренней стороне двери шкафа.
1.3.3Силовая часть электропривода на 25 А выполнена в виде панелей. На панелях расположены силовые полупроводниковые приборы с охладителями, защитные RСцепи и импульсные формирователи. Цепи
вторичной коммутации связаны с другими устройствам через разъем. 1.3.4. На передней двери шкафа электропривода расположены
следующие приборы и аппараты:
1)кнопки управления выключателем (пускателем), включенным в силовые цепи – "вкл." и "откл.";
2)переключатель S7 для местного выбора направления чередования фаз выходного напряжения – "вперед" или "назад";
3)четыре резистора для управления напряжением задания выходной частоты (скорости) - "вперед" или "назад" (грубо и точно);
4)сигнальные лампы:
"напряжение сети"; "напряжения главных цепей ";
"напряжение цепей подзаряда" (для электропривода на 25А); "питание собственных нужд"; "отключено"; "перегрузка по току "; "обрыв фазы двигателя ";
5) измерительные приборы: вольтметр "напряжение на выходе"; амперметр " ток на выходе"; вольтметр "выходная частота".
1.3.5 На обратной стороне двери шкафа расположены следующие аппараты и устройства:
1)тумблер для выбора управления "местное", "дистанционное";
2)два резистора для корректировки уровней напряжения задания на частоту (скорость) в двух направлениях - "вперед" и "назад";
3)платы системы управления (на поворотной раме).
1.4 Устройство и работа изделия
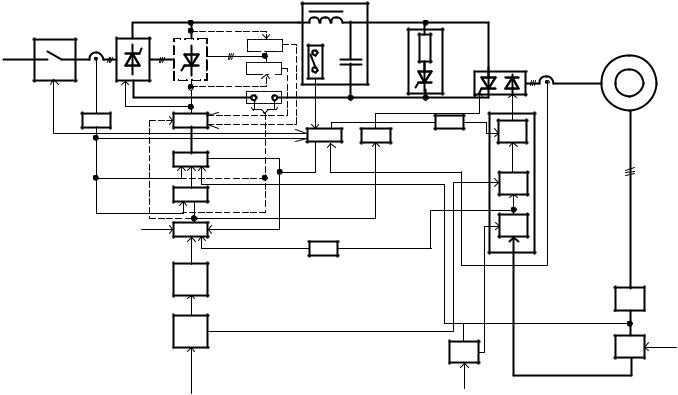
1.4.1Структурная схема многодвигательного электропривода показана на рисунке 1.1, а однодвигательного – на рисунке 1.2. Обе структуры реализованы на одной и той же плате регулирования.
Переход с одной структуры на другую осуществляется с помощью тумблеров S1, S2, расположенных на плате регулирования.
Структура для многодвигательного электропривода (рисунок 1.1) используется также для наладочных режимов в однодвигательном электроприводе.
1.4.2Принцип работы электропривода основан на преобразовании переменного напряжения промышленной частоты в переменное напряжение регулируемой частоты.
1.4.3Подана напряжения на управляемый выпрямитель осуществляется пускателем (П), управление которым производится с помощью кнопок "включено" и "отключено", а также воздействием сигналов защит, все команды на включение - отключение выключателя или пускателя формируются с помощью платы защиты системы управления.
1.4.4Силовой управляемый выпрямитель (УЗ) с системой

фазоимпульсного управления (СУЗ) осуществляет амплитудное регулирование величины выходного напряжения, выпрямитель выполнен по трехфазной мостовой схеме.
1.4.5 Систем авторегулирования (САР) обеспечивает плавное регулирование скорости асинхронных, синхронно-реактивных двигателей, а также разгон, торможение, реверс двигателя.
Основные устройства регулирующей части электропривода расположены на плате регулирования (ПР).
Регулирующая часть обеспечивает:
1)формирование входного сигнала задания управления;
2)регулирование темпа изменения задания на частоту (0,5-60)с;
3)изменение выходного напряжения электропривода до номинального значения в функции частоты;
4)поддержание выходного напряжения постоянным по величине на частотах выше номинальной;
5)корректировку закона частотного управления электропривода:
для многодвигательного
Uf = const, .
для однодвигательного
Ef = const,
где
U – действующее значение выходного напряжения; Е – действующее значение ЭДС двигателя;
f– выходная частота;
6)точность поддержания выходного напряжения и частоты в пределах, оговоренных в ТУ yа электропривод;
7)устранение возможных автоколебаний;
8)торможение электропривода;
9)реверс электропривода;
10) работа электропривода от внешнего генератора импульсов.
1.4.6. Предусмотрена работа САР на однодвигательный или многодвигательный электропривод. В обоих случаях поддержание скорости осуществляется без применения вращающихся датчиков скорости.
С целью обеспечения высокой точности частоты и поддержания оборотов синхронно-реактивных двигателей предусмотрена возможность работы САР с применением внешнего цифрового задающего генератора (ВЦЗГ).
Процесс торможения электродвигателей осуществляется методом динамического торможения с рассеиванием энергии на резисторах.
Система САР выполнена двухконтурной по принципу подчиненного регулирования. Внутренним контуром является контур регулирования выходного тока преобразователя. Внешним – контур регулирования ЭДС двигателя или частоты преобразователя.
1.5 Условное обозначение узлов структурной схемы (рисунок 1.1,
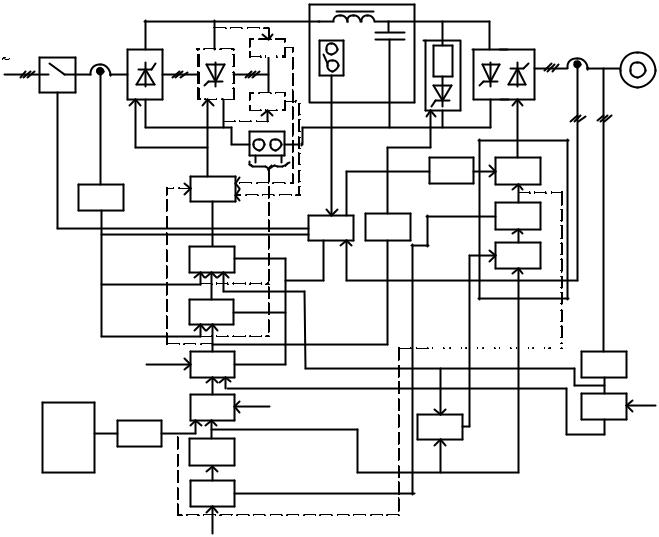
рисунок 1.2.)
А(П) – силовой выключатель автоматический (пускатель), АИН – автономный инвертор напряжения, ВЦЗГ – внешний цифровой задающий генератор,
ДСВ-А – датчик состояния вентилей анодной группы инвертора, ведомого сетью (УИ), ДСВ-К– датчик состояния вентилей катодной группы инвертора, ведомого сетью (УИ),
ДТ– датчик входного тока, ДН– датчик напряжения,
|
|
|
Ф |
|
|
|
L |
А(п) |
УВ |
УИ |
|
|
ДСВ-А |
С |
|
Uc |
|
|
|
|
|
ДСВ-К |
|
|
|
Ш |
|
|
ДТ |
СУВ |
|
|
|
|
|
|
|
СЗС |
УТ |
|
|
РТ1 |
|
|
|
Jd |
|
|
|
РТ2 |
|
|
I огр |
РЭ |
|
|
|
|
|
|
|
Еог |
|
|
|
Е*огр |
U |
|
|
УО |
|
|
|
|
|
ВЦЗГ |
ДЧ |
|
|
|
Задан. |
ЗИ |
|
|
|
|
|
|
ВЦЗГ |
|
|
|
|
УР |
|
|
|
Uзад |
|
ТУ |
АИН |
ДТ |
M |
|
|||
|
|
|
|
СУИ |
СТ |
ФИ |
обрыв |
КР |
|
|
фазы |
|
|
ЗГ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ДН |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
|
|
Uоп |
Id |
|||||||||||||
|
|
ДЭ |
||||||||||||||
УДР |
E |
|||||||||||||||
|
|
Uогр |
|
|||||||||||||
Рисунок 1.1.– Структурная схема многодвигательного электропривода.
ДЭ – датчик ЭДС, ДЧ – датчик частоты,
ДСИ – датчик срыва инвертора, ЗИ – задатчик интенсивности, ЗГ – задающий генератор, КР – кольцевой распределитель,
А(П) |
|
|
|
|
L |
Ф |
|
|
УВ |
|
УИ |
ДСВ - А |
ДСИ |
ТУ |
М |
|
|
ΦUсети |
|
|
|
C |
|
|
||
|
|
|
|
|
АИН ДТ |
|
||
|
|
|
|
ДСВ - К |
|
|
|
|
|
ДТ |
|
СУВ |
|
|
|
СУИ |
|
|
|
|
|
СТ |
ФИ |
|
||
|
|
|
|
|
СЗC |
УТ |
|
|
|
|
|
РТ1 |
|
|
|
|
|
|
|
|
|
|
Шунтирован |
|
КР |
|
|
|
|
РТ2 |
|
|
Обрыв |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
фазы |
|
|
|
|
I*огр |
РЧ |
|
|
|
ЗГ |
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
ДЧ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ЗИ |
|
|
|
|
|
|
|
|
(Uзад) |
|
|
|
ДН |
|
|
|
|
|
|
U |
|
|
|
|
|
|
УР |
|
|
U |
|
|
|
|
|
|
|
- U |
ДЭ |
Id |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
УДР ±Uоп |
|
|
|
|
|
±Uзад |
|
|
|
Е |
|
|
|
|
|
|
U*огр |
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 1.2.– Структурная схема однодвигательного электропривода.
Н – нагрузка, РТ1, РТ2 - регуляторы тока,
РЧ - регулятор частоты, РЭ - регулятор ЭДС,
СТ - узел силового токоограничения, СУВ - система управления выпрямителем, СУИ - система управления инвертором, СЗС - система защиты и сигнализации; ТУ - узел динамического торможения, УВ - управляемый выпрямитель, УИ - инвертор, ведомый сетью, УР - устройство реверса, УО - усилитель-ограничитель,
УТ - устройство управления торможением, УДР - устройство двухзонного регулирования,
Ф- силовой фильтр ,
ФИ - формирователь импульсов,
Ш- шунт.
1.6.Лабораторный стенд для исследования электропривода переменного тока типа ЭКТ2Д (рисунок 1.3)
Лабораторный стенд укомплектован исследуемым преобразователем ЭНТ2Д (на схеме UZ1) и нагрузочными устройствами, в качестве которых используются: асинхронный двигатель М1 и резисторы R3 – R5. Нагрузка на асинхронном двигателе М1 регулируется изменением якорного тока генератора
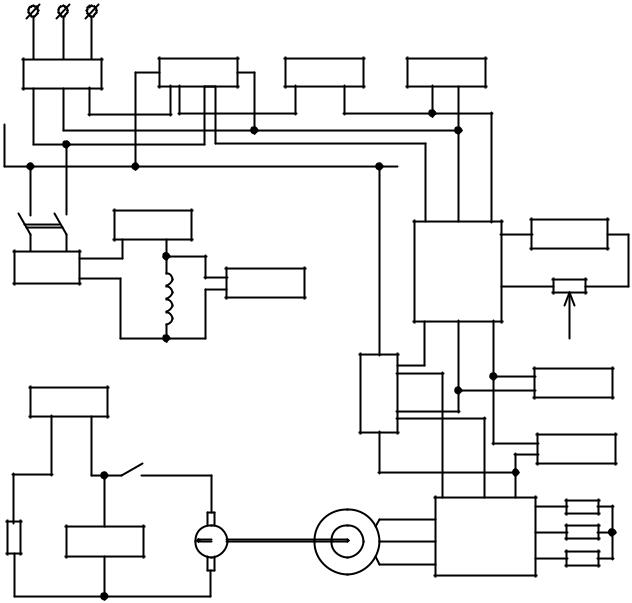
G1 путем изменения напряжения на обмотке его возбуждения регулятором UZ3. Переключатель SА2 служит для подключения к преобразователю UZ1 в качестве нагрузки или резисторов R3 – R5, или асинхронного двигателя М1. Стенд подключается к электросети автоматическим выключателем QF1.
Преобразователь UZ1 (пускатель К1 и выключатель QF1) включаются в работу по инструкции, приведенной в 2.4.
Измерительные приборы PW1, РА1, РV1 контролируют соответственно мощность, ток и напряжение на силовом входе преобразователя UZ1 приборы PW2, РА2, РV2 контролируют аналогичные параметры на силовом выходе преобразователя; прибор РV3 контролирует напряжение управления преобразователя. Приборы РАЧ и РV6 контролируют мощность нагрузки на валу асинхронного двигателя М1.
 380/220
380/220
QF1
N
S3
UZ3
PA4
 R2 PV6
R2 PV6
PW1 |
PA1 |
PV1 |
PA3 |
|
PV3 |
|
|
|
||
|
|
UZ1 |
|
OB |
M2 |
PV5 |
|
S7 |
|||
|
|
|
PW2 |
PV2 |
|
|
|
|
|
PA2 |
M1 |
|
R3-R5 |
|
|
|
M2 |
|
|
|
|
SA2 |
Рисунок 1.3.– Схема лабораторного стенда.
2. ЛАБОРАТОРНАЯ РАБОТА №12
ИЗУЧЕНИЕ ЭЛКТРОПРИВОДА ЭКТ2Д И ЕГО СИЛОВОГО БЛОКА
2.1. Цель работы
Целью данной работы является изучение принципа действия и основных характеристик тиристорного преобразователя частоты с автономным инвертором и принудительной коммутацией силовых вентилей, в частности, его силовой части.
2.2. Устройство и работа силовой схемы электропривода
2.2.1.Силовая схема электропривода предназначена для преобразования переменного напряжения питающей сети в переменное напряжение регулируемой частоты и амплитуды.
Упрощенная схема силовой части электропривода представлена на рисунке 2.1.
2.2.2.Силовая схема содержит следующие функциональные узлы: силовой управляемый выпрямитель (УВ); LC – фильтр (Ф); автономный инвертор напряжения (АИН); тормозное устройство (ТУ) и источники напряжения подзаряда (UП1, UП2).
2.2.3.Силовой управляемый выпрямитель.
2.2.3.1.Силовой управляемый выпрямитель представляет собой трехфазную мостовую схему.
Регулирование величины выпрямленного напряжения в УВ достигается изменением угла управления тиристоров, которое осуществляется системой фазо-импульсного управления (СУВ).
2.2.3.2.УВ подключается к питающей сети с помощью пускателя П.
2.2.3.3.На входе УВ установлен токоограничивающий реактор L1. В цепь каждой фазы включены трансформаторы тока Т1, Т2, ТЗ, выполняющие функции датчиков тока.
2.2.3.4.К выходу УВ подключен LС – фильтр (Ф). Фильтр выполняет функцию сглаживания пульсации выпрямленного тока и напряжения, и токоограничения в аварийных режимах.
2.3.4. Автономный инвертор напряжения.
2.2.4.1.В электроприводе использован автономный инвертор напряжения (АИН) с пофазной коммутацией.
2.2.4.2.Схема АИН представлена на рисунке 2.1. Элементы схемы необходимо рассматривать как следующие функциональные группы:
1.мост основных тиристоров (V3, V4, V7, V8, V11, V12);
2.мост коммутирующих тиристоров (V13 – V18);
3.мост обратных диодов ( V1, V2, V5, V6, V9, V10) ;
4.коммутирующие конденсаторы (СЗ, С4, С5);
5.коммутирующие дроссели (L1, L2);
6.разделительные диоды (V25, V26);