

kurs_rabota
.pdfГОСУДАРСТВЕННОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«БЕЛОРУССКО-РОССИЙСКИЙ УНИВЕРСИТЕТ»
Кафедра «Электропривод и автоматизация промышленных установок»
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Методические указания к практическим занятиям и выполнению курсовых работ
для студентов специальности 1-53 01 05 «Автоматизированные электроприводы» заочной формы обучения
ЭП
А
 П
П
 У
У
Могилев 2009
2
УДК 62-53.001 ББК 32.965я73 Т 53
Рекомендовано к опубликованию учебно-методическим управлением
ГУ ВПО «Белорусско-Российский университет»
Одобрено кафедрой «Электропривод и автоматизация промышленных установок» «10» ноября 2008 г., протокол № 4
Составители: канд. техн. наук, доц. С. В. Кольцов; канд. техн. наук, доц. К. В. Овсянников
Рецензент канд. техн. наук, доц. С. К. Крутолевич
Методические указания к выполнению курсовых работ для студентов специальности 1–53 01 02 «Автоматизированные электроприводы» заочной формы обучения.
Учебное издание
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Ответственный за выпуск |
Г. С. Леневский |
Технический редактор |
А. Т. Червинская |
Компьютерная верстка |
С. В. Кольцов |
Издатель и полиграфическое исполнение Государственное учреждение высшего профессионального образования
«Белорусско-Российский университет» ЛИ № 02330/375 от 29.06.2004 г. 212000, г. Могилев, пр. Мира, 43
© ГУ ВПО «Белорусско-Российский университет», 2009

3
Введение
Теория автоматического управления и регулирования — наука, которая изучает процессы управления и основы проектирования автоматических систем в любой области техники. Иначе говоря, она изучает процессы управления и задачи создания любых систем регулирования.
Все системы управления делятся на разомкнутые и замкнутые.
На рисунке В.1 изображена функциональная схема разомкнутой сис-
темы.
|
|
f(t) |
g(t) |
u(t) |
y(t) |
ЗУ |
УУ |
ОУ |
ЗУ – задающее устройство, УУ – устройство управления, ОУ – объект управления; воздействия: g(t) – задающее, u(t) – управляющее, f(t) – возмущающее; y(t) – выходная координата
Рисунок В.1 – Функциональная схема разомкнутой системы
Разомкнутая система регулирования действует следующим образом. При изменении задающего воздействия g(t) устройство управления вырабатывает необходимый сигнал управления u(t) объекту. Объектом управления может быть любое техническое устройство или какой-либо технологический процесс. Выходная величина y(t) представляет собой физическую величину, подлежащую регулированию (y(t) — регулируемая величина или управляемая величина). В результате регулируемая величина y(t) приближается с той или иной точностью к требуемому значению. Источником воздействия g(t) может быть либо человек, либо автоматически действующее устройство (например, фотоэлемент в системе автоматической охраны или в системе автоматического включения освещения). По разомкнутому принципу работают многие известные всем автоматы. Примером такой системы с человеком может служить также управление самолета летчиком, когда управляемым объектом является самолет или его двигатель.
Область применения простейших систем регулирования ограничена прежде всего тем, что наличие возмущения f(t) может так сильно изменить выходную величину объекта y(t), что задача регулирования не будет решена. Поэтому прибегают к созданию конструктивно более сложных, но и значительно более совершенных замкнутых систем автоматического регулирования. В замкнутых системах используется принцип обратной связи и воздействие на объект формируется не только в зависимости от задающего воздействия, но и от состояния объекта. Точнее, регулирующее воздействие определяется отклонением регулируемой величины от заданного значения.

4
На рисунке В.2 приведена примерная функциональная схема замкнутой автоматической системы (системы управления с обратной связью).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Объект управления |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
f(t) |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Канал |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
u(t) |
|
|
возмущения |
|
|
y(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
g(t) |
x(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
ЗУ |
|
КУ |
|
УМ |
|
|
Канал |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
управления |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(–) |
yoc(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
ИП |
|
|
|
ИЭ |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
КУ – корректирующее устройство, УМ – усилитель мощности, ИЭ – измерительный элемент (датчик), ИП – измерительный преобразователь; воздействия: x(t) – сигнал ошибки, yОС(t) – сигнал обратной связи
Рисунок В.2 - Функциональная схема автоматической системы с обратной связью
Обратная связь, замыкающая систему, «передает» результат измерения выходной величины y(t) на вход системы. Состояние объекта зависит от приложенных к нему воздействий. Задача системы состоит в том, чтобы возможно точнее воспроизводить на выходе y(t) задаваемый закон изменения задающего воздействия g(t) и возможно полнее подавлять влияние возмущающего воздействия f(t), а также других внешних и внутренних помех, если они имеются. Для этой цели выходная величина y(t) сравнивается через измерительную цепь из датчика и измерительного преобразователя с входной величиной g(t). В результате сравнения появляется рассогласование (ошибка):
x(t) = g(t) – yОС(t) = g(t) – y(t) kОС.
Рассогласование x(t) служит источником воздействия на систему, причем система работает на сведение к допустимому малому значению величины этого рассогласования (т. е. величины ошибки системы x(t)).
В общем случае задающее воздействие g(t) может меняться произвольно.
Случаю g(t) = const соответствует автоматическое регулирование на поддержание постоянного значения регулируемой величины (например, скорости вращения вала двигателя, температуры в некоторой камере, напряжения на клеммах генератора и т. п.). Это типичная система стабилизации заданного параметра (например, стабилизация крена самолета, углового положения антенны радиолокатора и т. п.).
5
Если g(t) заранее задано во времени (например, g(t) = f(t)), заданный закон g(t) называется программой управления. При таком программном автоматическом управлении выходная величина x(t) должна следовать заданному закону изменения во времени. Примером может служить программа задания скорости конвейерной линии, начиная от момента включения до выхода на рабочий режим.
К системам автоматического управления, работающим по принципу обратной связи, относятся также следящие системы. В следящих системах задающее воздействие изменяется по произвольному, заранее неизвестному закону; такие системы используются при дистанционной передаче углов поворота. В этом случае угол поворота выходного вала следящей системы θвых(t) должен следовать произвольно задаваемому повороту входного вала θвх(t) с наименьшей ошибкой. По принципу следящей системы работают системы наведения, управления рулями самолета. В следящей системе антенны радиолокатора (рисунок В.3) исполнительным устройством является электродвигатель привода антенны. Рассогласованием служит угловая ошибка между лучом радара и направлением на цель.
|
|
|
x(t) |
|
uдв(t) |
ω(t) |
|
|
|
|
|
f(t) |
|
|||
|
|
|
|
|
|
|
|
|
|
|
||||||
θвх(t) |
|
|
|
|
θвых(t) |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
усилитель |
|
электродвигатель |
|
редуктор |
антенна |
|
||||||||
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
локатора |
|
|
|
|
|
(-) |
|
|
сельсинная обратная связь |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок В.3 – Пример замкнутой системы регулирования
Важно отметить, что в замкнутых системах автоматического управления и регулирования, как правило, не бывает «спокойного» состояния равновесия. Все время имеются какие-то внешние возмущающие воздействия, порождающие рассогласование, которое заставляет систему работать. Поэтому важнейшим элементом проектирования таких систем является исследование динамических процессов, отражающих поведение всех звеньев системы.
Особенностью, усложняющей расчет динамики системы, является то, что в замкнутой системе все физические величины, представляющие воздействие одного звена на другое, связаны в единую замкнутую цепь. Поэтому приходится уравнения динамики всех звеньев системы решать совместно, т. е. иметь дело с дифференциальными уравнениями высокого порядка.
На рисунке В.3 приведен пример автоматической системы с одной задающей g(t) и одной регулируемой y(t) величинами. В общем же случае система может иметь много входов и выходов. Это многомерные (или
6
многосвязные) системы.
Кроме чисто технических автоматических систем аналогичные принципы действия заложены и в биологических системах, экономических системах и т. п., что изучается соответствующими направлениями кибернетики и общей теории систем управления.
Кроме полностью автоматических систем имеются автоматизированные системы управления или полуавтоматические, в которых кроме технических средств в состав системы управления входят люди. Таковы, например, многие системы управления производственными процессами. В простейших случаях в систему управления включается один человекоператор, например, при полуавтоматическом управлении летательным аппаратом или какой-либо наземной установкой, манипулятором и т. п.
Задачами линейной теории автоматического управления и регулирования являются:
–изучение динамических свойств и характеристик различных типов звеньев автоматических систем любой физической природы и конструкции;
–составление функциональных и структурных схем систем автоматического управления и регулирования;
–исследование устойчивости замкнутых систем;
–оценка качественных показателей процессов управления;
–построение динамических характеристик этих систем;
–определение ошибок и показателей точности замкнутых систем;
–определение чувствительности систем к изменению параметров и других факторов;
–изучение различных видов корректирующих устройств, вводимых
всистемы для повышения точности и улучшения динамических качеств;
–создание частотных, корневых и других методов синтеза корректирующих устройств и различных методов оптимизации систем по показателям качества;
–разработка методов анализа и синтеза сложных многомерных и комбинированных систем автоматического управления.
Все это является базой для грамотного построения замкнутых автоматических систем и для инженерных расчетов при анализе существующих и проектировании новых систем автоматического управления. Эти методы широко применяются не только для систем регулирования и управления, но и во всех случаях анализа и разработки замкнутых динамических контуров в любых технических системах, в биотехнических и в экономических системах.

7
1 Уравнения звеньев и виды основных характеристик
Чтобы составить уравнения динамики системы автоматического управления или регулирования, система разбивается на звенья (см. рисунок В.3). Затем рассматривается каждое звено системы в отдельности (рисунок 1). Входная х(t) и выходная y(t) величины соответствуют физическим величинам, выражающим воздействие предыдущего звена на данное звено (х(t)) и воздействие данного звена на последующее (y(t)). Например, в электродвигателе следящей системы (рисунок В.3) роль величины х(t) будет играть напряжение на якоре электродвигателя uдв(t), выходная величина y(t) — угловая скорость вращения вала ω(t).
Звено системы может являться техническим устройством любой физической природы, конструкции и назначения. Поэтому составление уравнения динамики каждого конкретного звена системы является предметом соответствующей конкретной области технических наук (электротехники, теплотехники, динамики полета и т. п.), к которым и следует каждый раз обращаться.
x(t) |
|
|
|
y(t) |
|
Звено |
|||||
|
|
|
|||
|
|
||||
|
|
|
|
|
Рисунок 1 – Динамическое звено
Дифференциальное уравнение звена. Допустим, что в результате составления уравнения динамики какого-нибудь конкретного звена (см. рисунок 1) получилось следующее линейное дифференциальное уравнение, связывающее входную и выходную переменные:
dny(t) |
|
dn-1y(t) |
dy(t) |
dmx(t) |
|
dm-1x(t) |
dx(t) |
|
an dtn |
+an-1 |
dtn-1 |
+...+a1 dt |
+a0y(t) = bm dtm |
+bm-1 |
dtm-1 |
+...+b1 dt |
+b0x(t). |
В теории автоматического регулирования принято приводить уравнение звена к стандартному виду на базе преобразования Лапласа:
∞
X(p) = ⌠⌡ x(t) e− pt dt .
0
При этом временные функции заменяются их изображениями:
anpnY(p)+an-1pn-1Y(p)+...+a1pY(p)+a0Y(p) = = bmpmX(p)+bm-1pm-1X(p)+...+b1pX(p)+b0X(p),
d
где р обозначает операцию дифференцирования р = dt .
8
Вынося общие множители, получаем
Y(p)·(anpn+an-1pn-1+...+a1p+a0) = X(p)·(bmpm+bm-1pm-1+...+b1p+b0).
Послепреобразований
Y(p)·(Tnpn+Tn-1pn-1+...+T1p+1) = k·(τmpm+τm-1pm-1+...+τ1p+1)·X(p).
Здесь введены постоянные времени, которыми в данном случае бу-
дут
a1 |
a2 |
|
an |
|
T1 = a0, |
T2 = a0 |
,..., |
Tn = a0, τ1 |
= |
и коэффициент усиления звена
k = b0 · a0
b1 |
b2 |
|
bm |
|
b0, |
τ2 = b0 |
,..., τm = |
b0 |
’ |
В установившемся состоянии, когда х(t) = const и y(t) = const, получаем уравнение статики данного звена:
y(t) = k·х(t).
Передаточная функция звена. Ее определение дается на базе дифференциального уравнения звена. Передаточной функцией звена W(р) называется отношение изображений по Лапласу выходной и входной величин звена, т. е.
Y(p)
W(p) = X(p)
при нулевых начальных условиях. В данном случае имеем
Y(p) |
|
bmpm+bm-1pm-1+...+b1p+b0 |
τmpm+τm-1pm-1+...+τ1p+1 |
Bm(p) |
W(p) = X(p) |
= |
anpn+an-1pn-1+...+a1p+a0 |
= K·Tnpn+Tn-1pn-1+...+T1p+1 |
= k·An(p)’ |
где Bm(p) и An(p) – многочлены с коэффициентами 1 в младших членах, причем степень Bm(p), как правило, ниже степени An(p).
Сравнивая полученное выражение передаточной функции с дифференциальным уравнением звена, видим, что формально передаточную функцию звена можно составлять как отношение операторных многочленов правой и левой частей уравнения звена. И наоборот, зная передаточ-

9
ную функцию звена, легко написать его уравнение, связывающее входную и выходную координаты:
Y(p) = X(p)·W(p).
Если известно входное воздействие и передаточная функция звена,
обратное преобразование Лапласа восстанавливает оригинал y(t) – вре-
менную функцию выходного сигнала. Отыскание оригинала y(t) по изображению Y(p) может быть сделано:
–по таблицам обратного преобразования Лапласа [4];
–операционным методом с использованием второй теоремы разло-
жения;
–с помощью вычислительных машин (программы Maple, MathCAD, MatLab).
Частным случаем временной характеристики является переходная
функция звена h(t). Переходной функцией называется реакция звена на единичное ступенчатое воздействие на входе, т. е. переходный процесс на выходе y(t) при единичном скачке на входе звена x(t) = 1(t) (см. рисунок 2).
Динамическое
звено
Рисунок 2 – К определению переходной функции звена
Иначе говоря, переходная функция звена h(t) описывает переходный процесс на выходе звена при подаче на его вход единичной ступенчатой функции. Ступенчатая функция представляет собой распространенный вид входного воздействия в автоматических системах. К такому виду воздействий относятся наброс или сброс нагрузки электродвигателя. Ступенчатые воздействия в электронных схемах возникают при включении напряжения питания, подаче сигналов задания через реле или от дискретных элементов.
График единичного ступенчатого воздействия приведен на рисунке 2. Здесь 1(t) – так называемая единичная ступенчатая функция:
|
|
|
|
|
1(t) = |
0, |
если t < 0 |
||
1, |
если t ≥ 0 |
|
|
|
Возможно, что ступенчатая функция имеет величину g0, отличную от 1, тогда x(t) = g01(t).

10
Изображение по Лапласу единичной ступенчатой функции равно:
L{x(t)}= L{1(t)}= 1p .
Поэтому
−1 |
−1 |
|
1 |
|
−1 |
W ( p) |
||
h(t) = L |
{X ( p) W ( p)}= L |
|
|
W ( p) |
= L |
|
p |
. |
|
||||||||
|
|
p |
|
|
|
|
||
Отсюда следует, что переходная функция звена есть обратное
преобразование Лапласа от передаточной функции звена, деленной на символ преобразования Лапласа р.
2 Функциональные и структурные схемы
Функциональной схемой называется такая схема, в которой каждому функциональному элементу системы соответствует определенное звено. Функциональная схема отображает состав системы автоматического регулирования (САР) и взаимодействие ее элементов. Примером функциональной схемы является рисунок В.3.
Структурная схема системы может быть получена из функциональной схемы, если известны передаточные функции (или дифференциальные уравнения) и параметры всех элементов, входящих в ее состав.
Графическое изображение структурной схемы аналогично изображению функциональной схемы, с той лишь разницей, что элементы структурной схемы описываются передаточными функциями. Поэтому в прямоугольники, изображающие динамические звенья, вписывают значения их передаточных функций.
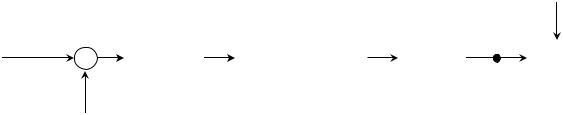
Существует три типа действий на структурных схемах:
–преобразование сигнала (рисунок 3, а);
–ветвление (рисунок 3, б);
–суммирование (или вычитание) сигналов (рисунки 3, в, г).
а) |
|
|
б) |
|
|||||
|
X(p) |
|
|
|
Y(p) |
|
X(p) |
X(p) |
|
в) |
|
|
|
W(p) |
|
г) |
|
X(p) |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|||
X1(p) |
X1(p)+X2(p) |
X1(p) |
X1(p)-X2(p) |
||||||
|
|
|
|
||||||
|
X2(p) |
|
|
|
X2(p) |
(-) |
|||
а – динамическое звено; б – ветвление сигнала; в – сложение сигналов; г – вычитание сигналов
Рисунок 3 Графические изображения элементов структурных схем