

Teoreticheskaya_mehanika._Kinematikastatika._Uch._metod._posobie
.pdf51
Часто применяется соединение дисков, когда два диска вращаются вокруг одной неподвижной оси. Если при этом они жестко соединены друг с другом, то их угловые скорости равны (на рис. 2.14, в – второй диск).
Содержание контрольных работ для студентов на тему «вычисление кинематических характеристик точек при поступательном и вращательном движениях твердого тела» дано в приложении (контрольная работа 1, задача
2).
Пример 2.3.
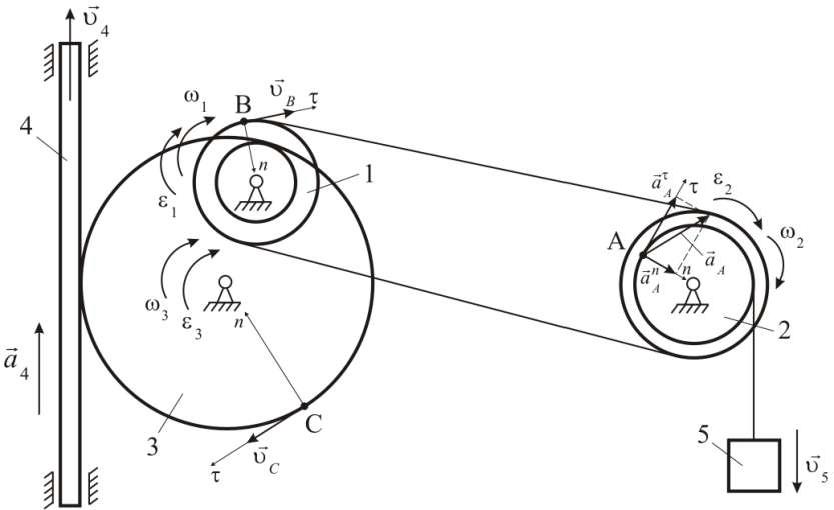
Механизм состоит из трех ступенчатых дисков (1–3), находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной на одно из колес. На ободах колес расположены точки А, В и С (рис. 2.15).
Исходные данные: R1 |
6 |
см; R 2 7 см; R 3 14 см; r1 4 см; r2 6 |
|
см. Уравнение движения S |
4 |
3 t 2 t , см (за положительное принято движе- |
|
|
|
|
|
ние рейки вниз). |
|
|
|
Для момента времени t1 |
2 с требуется вычислить характеристики |
||
движения: VВ , VС , aА ; 2 , |
1 , |
3 . |
|
Решение
1. Определяем направление движения рейки 4, т. е. всей системы.
V4 S 4 |
d |
3t 2 t 6t 1 (см/с); |
|
|
|
|
||||
dt |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
для t |
1 |
2 |
с |
V 6 2 1 11 см/с; |
|
|
|
|
||
|
|
|
|
|
4 |
|
|
|
|
|
a |
4 |
a |
V |
6 см/с2. |
|
|
|
|
||
|
|
|
4 |
4 |
|
|
|
|
|
|
Движение рейки 4 (рис. 2.15): |
|
|
|
|
||||||
а) поступательное, прямолинейное, т. е. a |
4 |
a |
, a n отсутствует; |
|||||||
|
|
|
|
|
|
|
|
4 |
4 |
|
б) равноускоренное, т. к. знаки V и a |
одинаковы, и a const ; |
|||||||||
|
|
|
|
|
|
4 |
4 |
|
|
4 |
в) направлено вверх, т. к. знаки V4 и |
a4 отрицательны. |
|||||||||

52
Движение остальных тел механизма определяется направлением движения рейки 4 (рис. 2.15).
2. Составляем уравнения связей для всех тел системы, используя точки зацепления между телами и условие, что ремень и нить считаются нерастяжимыми. При используемом в задаче соединении тел знаки параметров сохраняются.
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
R |
|
|
|
|
S4 |
3 t 2 t |
; |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
4 |
|
3 |
3 |
3 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R3 |
|
|
|
R3 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
R |
|
|
|
|
r |
|
|
|
|
|
3 R3 |
|
|
S4 |
|
|
R3 |
|
S4 |
3 t 2 t ; |
|
|
|
|
|||||||||||||||||||||||||||||
3 |
3 |
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
r1 |
|
|
|
|
|
|
|
|
R3 |
|
|
r1 |
|
|
|
|
r1 |
|
|
|
r1 |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
1 R1 2 R2 |
|
|
2 |
1 R1 |
S4 |
|
R1 |
S |
4 |
|
|
|
R1 |
|
3 t 2 t |
|
R1 |
|
; |
|||||||||||||||||||||||||||||||||||||||
|
r |
|
R |
|
|
r R |
|
r |
R |
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|||||||||||
|
S5 |
|
|
|
2 r2 |
|
|
|
|
S 4 |
|
|
R1 |
r2 |
|
S 4 |
|
|
|
R1 r2 |
|
|
|
|
3 t |
2 t |
|
|
R1 r2 |
. |
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
R |
2 |
|
|
|
|
|
|
|
|
|
|
|
r R |
2 |
|
|
|
|
|
|
|
|
|
|
|
r R |
2 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|||||||
Для определения скоростей тел дифференцируем составленные законы движения по времени:
|
|
|
|
V |
S |
|
|
|
|
|
R |
|
|
|
R |
|
|
|
|
V4 |
6t 1 ; |
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
4 |
3 |
3 |
3 |
3 |
3 |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R3 |
|
|
|
|
R3 |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
S 4 |
|
|
|
V4 |
|
; |
|
|
|
|
|
|
|
S |
|
|
|
R1 |
|
|
V |
|
|
R1 |
|
|
|
6t 1 |
|
R1 |
|
; |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
r R |
|
|
|
R |
|
|
|
|
R |
|
|||||||||||||||||||||||||||||||||||
1 |
1 |
|
r |
|
|
|
|
r |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
4 |
|
|
2 |
|
|
|
|
|
4 |
|
|
|
r |
2 |
|
|
|
|
|
r |
2 |
|
||||||||
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R1 r2 |
V |
|
|
R1 r2 |
|
|
6t 1 |
|
|
R1 r2 |
. |
|
|
|
|
||||||||||||||||||||||
|
|
|
|
V |
5 |
|
|
S |
5 |
|
|
|
S |
4 |
|
|
|
|
4 |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r R |
2 |
|
|
|
|
|
|
r R |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
r R |
2 |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|||||||
3. Рассчитываем требуемые характеристики движения точек и тел.
Так как точка С и точка зацепления рейки и колеса 3 находятся на одном радиусе этого колеса, то
VC V4 11 см/с (рис. 2.15).
53
Угловое ускорение колеса 3 получаем, дифференцируя по времени выражение угловой скорости
|
|
|
|
|
|
|
V4 |
|
a4 |
, т.е. |
||
|
|
3 |
3 |
R3 |
R3 |
|||||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||
|
3 |
6 |
0, 43 |
с-2 (рис. 2.15); |
||||||||
|
14 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
Точка В находится на внешнем ободе колеса 1, тогда
VB 1 R1 2,75 6 16,5 см/с (рис. 2.15),
где 1 V4 11 2,75 с-1. r1 4
Угловое ускорение колеса 1 получаем, дифференцируя по времени выражение угловой скорости
|
|
|
V4 |
|
a4 |
6 1,5 с−2 (рис. 2.15). |
||
1 |
|
|
||||||
|
1 |
r1 |
|
r1 |
4 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|||
|
|
|
||||||
Угловая скорость колеса 2:
|
|
|
|
R1 |
|
|
6 |
|
66 |
|
|
|
-1 |
|
2 V4 |
|
|
|
11 |
|
|
|
|
2,36 с |
|
(рис. 2.15). |
|||
|
R2 |
|
7 |
|
|
|||||||||
|
|
|
r1 |
4 |
|
28 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|||||||
54
Рис. 2.15

55
Для расчета ускорения точки А, расположенной на внутреннем ободе колеса 2, необходимо рассчитать две составляющие этого ускорения при криволинейном движении этой точки:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
А |
a |
a n |
, |
|
откуда |
a |
А |
|
|
a |
|
2 a n 2 |
, |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
|
А |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
|
|
А |
|
|
|
||||||||
где |
|
|
|
|
|
|
2 |
|
r2 |
|
|
2 |
|
r2 |
d |
|
|
|
|
|
|
|
R1 |
|
|
r2 |
|
|
|
|
|
|
|
R1 |
r2 |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
a A |
|
|
|
|
|
|
|
|
V4 |
|
|
|
|
|
|
|
|
a |
4 |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
r1 |
R2 |
|
|
|
|
|
|
|
|
|
|
|
r1 R2 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
6 |
|
|
|
|
|
|
|
|
216 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
6 |
|
|
|
6 |
|
7,7 (см/с2); |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
4 |
7 |
28 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a Аn 2А rА 2,36 2 6 33,42 см/с2; |
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
a А 2 |
a Аn 2 |
|
|
|
|
|
7,7 2 |
33,42 2 |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
a А |
|
|
|
|
|
|
|
|
|
1176,1864 34,3 см/с2 (рис. 2.15). |
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
Ответ: |
VB 16,5 см/с; |
|
|
|
a A 34,3 см/с2; |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
C |
11 см/с; |
|
|
|
|
1 |
1,5 с−2; |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2,36 с−1; |
|
|
|
|
|
3 |
0,43 с−2. |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
2.3.Сложное движение точки
Движение точки по отношению к двум или нескольким системам отсчета называется сложным. Движение точки М по отношению к подвижной системе отсчета называется относительным (рис. 2.16). Используются понятия:
относительная траектория, относительная скорость (Vr ) и относительное ускорение ( ar ).
Движение подвижной системы отсчета по отношению к неподвижной является для точки Рис. 2.16 переносным. Скорость и ускорение точки под-
56
вижной системы отсчета, в которой в данный момент времени находится движущаяся точка М, называются переносной скоростью (Ve ) и переносным
ускорением ( ae ).
Движение точки М по отношению к неподвижной системе отсчета называется сложным или абсолютным. Используются понятия: абсолютная траектория, абсолютная скорость (VM ) и абсолютное ускорение ( aM ).
Теорема. Абсолютная скорость точки равна геометрической сумме ее относительной и переносной скоростей:
V Vr Vo e r Vr Ve ,
здесь: Vr скорость относительного движения;
Ve – скорость переносного движения.
Теорема. Абсолютное ускорение точки равно геометрической сумме трѐх ускорений – относительного, переносного и ускорения Кориолиса (или поворотного):
a ar ae ak ,
здесь: ar – ускорение относительного движения;
ae – переносное ускорение; ak – ускорение Кориолиса.
Ускорение Кориолиса ( ak ) равно удвоенному векторному произведению угловой скорости переносного вращения ( e ) на относительную скорость точки ( Vr ):
ak 2 e Vr
Модуль ускорения Кориолиса равен
ak e Vr sin .
Здесь: угол , угол между вектором относительной скорости Vr и вектором угловой скорости переносного вращения e .
Направление ускорения Кориолиса определяется по правилу Жуковско-
го.
57
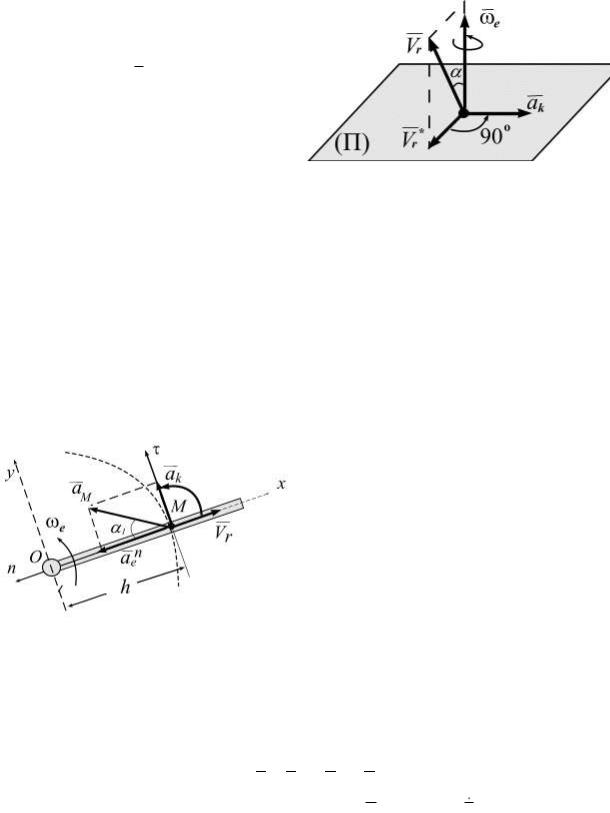
Правило Жуковского (рис. 2.17):
1.Следует провести плоскость перпендикулярно оси переносного вращения ( П e ).
2.Спроецировать вектор относительной скорости на эту плоскость: Vr Vr Vr sin .
3.Повернуть эту проекцию Vr
в этой плоскости на 900 по на- |
|
правлению дуговой стрелки |
|
переносного вращения e . |
Рис. 2.17 |
Содержание контрольных работ для студентов на тему «сложное движение точки» дано в приложении (контрольная работа 1, задача 3).
Пример 2.4. Стержень вращается в плоскости Oxy вокруг неподвижного центра O в плоскости рисунка с постоянной угловой скоростью
0,5c 1. Точка М скользит вдоль
|
|
|
|
стержня со скоростью 2 |
см |
. Вычис- |
||||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
с |
|
||
|
|
|
|
лить абсолютное ускорение |
точки |
|||||
|
|
|
|
M для момента времени 4 |
с (рис. |
|||||
|
|
|
|
2.18). |
|
|
|
|||
|
|
|
|
|
|
Решение. Стержень |
вращается |
|||
|
|
|
|
в плоскости Oxy вокруг неподвиж- |
||||||
Рис. 2.18 |
|
|
|
ного центра O с угловой скоростью |
||||||
|
|
|
|
|
0,5 с–1. Точка М скользит вдоль |
|||||
|
|
|
|
e |
||||||
|
|
|
|
|
|
|
|
|
||
стержня со скоростью V |
|
2 |
см |
(рис. 2.18). Абсолютное ускорение точки яв- |
||||||
r |
с |
|||||||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||
ляется векторной суммой трех ускорений: относительного, переносного и ускорения Кориолиса.
a ar ae ak ,
здесь: вектор относительного ускорения ar Vr 0 , т. к. Vr const.
58
Вектор переносного ускорения
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
e |
a |
|
a n , |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|||||||||
где a n |
2h (0,5) 2 |
|
8 2 |
см |
, |
a |
|
|
h 0 , |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
e |
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
с 2 |
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
здесь h OM Vr t 2 4 8 см. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
вектор aen направлен по оси Mn . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Ускорение Кориолиса ak |
|
2 e Vr sin 2 e Vr sin 90 2 e Vr , |
||||||||||||||||||||||||||||||||||||||||
при t 4c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
2 |
|
V |
|
|
2 0,5 2 2 |
см |
. |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
k |
e |
r |
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с 2 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Определим направление вектора |
|
ak , используя правило Жуковского. |
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и e равен 90 (вектор |
||||||||||||||||||||||
Угол между вектором относительной скорости |
Vr |
|||||||||||||||||||||||||||||||||||||||||
e Oxy ), тогда вектор |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
Vr разворачиваем на 90 по направлению дуговой |
||||||||||||||||||||||||||||||||||||||||||
стрелки e (рис. 2.18). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Вычислим абсолютное ускорение точки M : |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
a |
M |
(a n ) 2 |
a 2 |
( 2h) 2 (2 V |
) 2 . |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
e |
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
e |
|
|
|
e r |
|
|
|
|
|||||||||||
Тангенс угла ( 1) между aM и осью Mn равен: |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
tg( |
) |
ak |
|
|
2 eVr |
|
|
|
|
2 Vr |
|
|
|
2 |
|
. |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
a n |
|
|
|
2 |
|
h |
|
|
|
|
e Vr t |
|
|
e t |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В момент времени |
t 4c , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2,83 |
см |
, |
||||||||||||||||||||||||||
|
|
a |
M |
|
|
(a n ) 2 a 2 |
|
|
(2) 2 (2) 2 |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
e |
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с 2 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
arctg( |
|
|
2 |
|
|
) arctg( |
|
|
2 |
|
) arctg(1) 45 . |
||||||||||||||||||||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
e t |
|
|
|
|
|
|
|
|
|
|
|
|
0,5 4 |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Ответ: аМ = 2,83 см/с2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
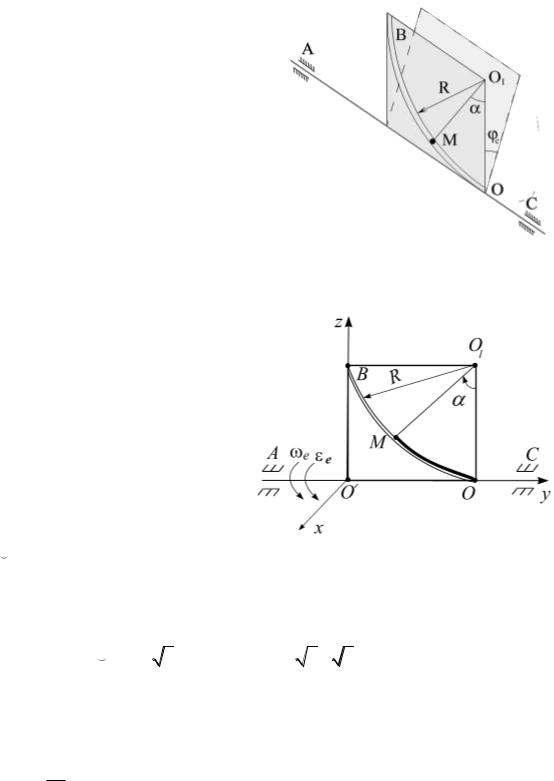
Пример 2.5. |
|
Пластина В вращается вокруг неподвижной оси AC со- |
||||||||||||||||||||||||||||||||||||||||
гласно уравнению |
e |
4t 5t3 (рис. |
2.19). На пластине по желобу движется |
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
точка согласно уравнению
OM Sr R  2 sin( t ) см. 4 4
2 sin( t ) см. 4 4
59
Вычислить абсолютную скорость и абсолютное ускорение точки М в момент времени t = 1 с, если радиус
желоба R 30cм .
Решение. Будем считать, что в |
|
||||||||
момент времени t = 1 с угол поворота |
|
||||||||
e имеет такое значение, при котором |
|
||||||||
|
|
|
|
|
|
|
|
|
|
тело В располагается в плоскости O yz |
|
||||||||
(рис. 2.20). |
|
|
|
|
|||||
Точка М совершает сложное дви- |
|
||||||||
жение, состоящее из |
относительного |
|
|||||||
(движение точки по желобу) и перенос- |
Рис. 2.19 |
||||||||
ного (вращение точки вместе с пласти- |
|
||||||||
ной вокруг оси АС) движений. |
|
||||||||
Вычислим абсолютную ско- |
|
||||||||
рость точки M : |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
V |
M Vr Ve . |
|
|||||||
|
|
|
|
||||||
Относительная скорость Vr . |
|
||||||||
Найдем положение точки М на пла- |
|
||||||||
стине В через 1с. Для этого вычис- |
|
||||||||
лим значение дуговой |
координаты |
Рис. 2.20 |
|||||||
S r OM при t 1c: |
|
|
|
||||||
|
|
|
|
||||||
|
R |
|
|
|
t) |
|
|
R |
|
|
|
|
|
R |
|
OM |
2 |
sin( |
|
|
2 |
2 |
|
см. |
|||||||
|
|
|
|
4 |
2 |
4 |
|||||||||
|
4 |
|
|
|
4 |
|
1c |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если обозначить угол, на который опирается дуга ОМ, через (рис.
2.20), то Sr R .
R 4R 4
60
Относительное движение точки задано естественным способом. Приведем оси M n к точке М на траектории. Относительная скорость Vr точки М при t 1c :
|
|
|
|
|
|
|
|
2 R |
|
|
|
|
2 R |
|
|
|
||
|
R 2 |
|
|
|
|
|
2 |
|
|
|
|
см |
|
|||||
Vr S r |
|
|
|
|
cos |
t |
|
|
|
|
|
cos |
t |
|
|
18,5 |
|
. |
4 |
|
4 |
16 |
|
16 |
с |
||||||||||||
|
|
|
4 |
|
|
|
4 |
|
1c |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
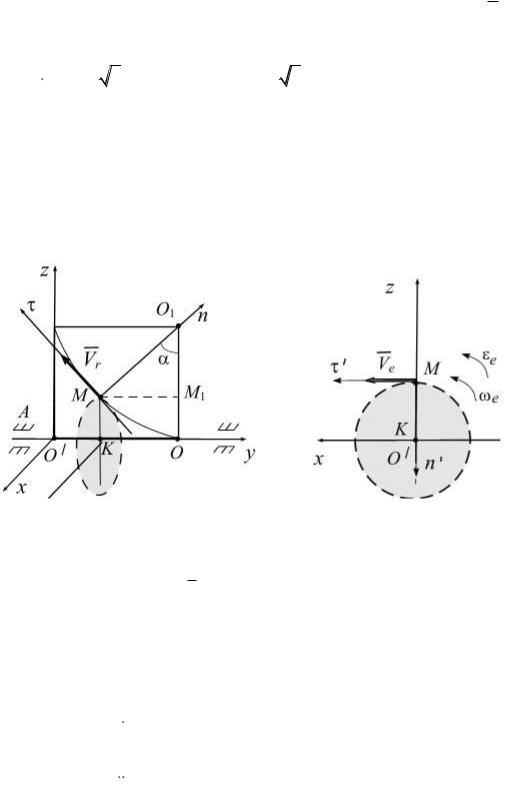
Вектор относительной скорости Vr лежит в соприкасающейся плоско- |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сти относительного движения – плоскость O yz и направлена по касательной |
||||||||||||||||||
к траектории относительного движения – по оси M (рис. 2.21, а). |
|
|
||||||||||||||||
а
б
Рис. 2.21
Переносная скорость Ve . В переносном движении точка движется в соприкасающейся плоскости переносного движения, параллельной плоско-
сти O / xz , по окружности радиусом MK (рис. 2.21, б).
Задано уравнение вращения пластины В: e 4t 5t 3 , тогда
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
3 ) |
|
|
|
|
15t 2 ) |
|
11c 1, |
||
|
e |
|
|
|
e |
|
|
|
( 4t 5t |
|
|
( 4 |
|
||||||||||
|
|
||||||||||||||||||||||
|
|
dt |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1c |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
d |
|
4 15t |
2 |
|
|
|
30t |
|
1c 30c 2. |
||||||
e |
|
|
e |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
dt |
||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||