

![]() Министерство
образования Российской Федерации
Министерство
образования Российской Федерации
Филиал Санкт-Петербургского государственного морского технического университета
СЕВМАШВТУЗ
А.Н. Манойленко
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Методические указания по выполнению лабораторных работ
Северодвинск 2007
УДК 62 -50 (075.8)
Манойленко А.Н. Теория автоматического управления. Основы теории управления.
Методические указания по выполнению лабораторных работ.- Северодвинск: РИО Севмашвтуза, 2007. - 69 с.
Отв.редактор к.т.н. доцент С.Н. Едемский
Рецензенты: к.т.н., доцент А.И. Чурносов;
заслуженный машиностроитель Российской Федерации ФГУП ПО
«Севмаш» С.А.Дроздов
Методические указания по курсовому проектированию по дисциплине «Теория автоматического управления» предназначены для студентов, обучающихся по специальности 180201 «Системы электроэнергетики и автоматизации судов». В указаниях приведены варианты заданий на курсовое проектирование и требования к содержанию и оформлению текстовой и графической документации.
Методические указания содержат основные теоретические положения, описание лабораторных установок, порядок выполнения лабораторных работ, требования к отчетам по лабораторным работам, контрольные вопросы и рекомендуемую литературу.
Печатается по решению редакционно-издательского совета Севмашвтуза.
ISBN © Севмашвтуз, 2007
СОДЕРЖАНИЕ
Лабораторная работа №1. Исследование частотных характеристик пассивных корректирующих звеньев.........4
Лабораторная работа №2. Изучение влияния обратных связей на характеристики электромашинного преобразователя..............................................................................................................................................................13
Лабораторная работа №3. Исследование переходных и частотных характеристик электронных моделей типовых динамических звеньев САУ...........................................................................................................................................17
Лабораторная работа №4. Исследование системы автоматической стабилизации напряжения генератора постоянного тока.............................................................................................................................................................29
Лабораторная работа №5. Исследование системы стабилизации частоты вращения двигателя постоянного тока с электромашинным усилителем мощности....................................................................................................................32
Лабораторная работа №6 Исследование системы стабилизации частоты вращения двигателя постоянного тока в системе генератор-двигатель с электромашинным возбудителем…………………………………………………..37
Лабораторная работа №7. Исследование импульсной системы стабилизации напряжения генератора постоянного тока………………………………………………………………………………………………………..43
Лабораторная работа №8. Исследование нелинейной системы автоматической стабилизации температуры…..51
Лабораторная работа №9 Исследование системы стабилизации частоты вращения ДТП с тиристорным усилителем мощности…………………………………………………………………………………………………64
Список литературы .........................................................................................................................................................69
ЛАБОРАТОРНАЯ РАБОТА №1
ИССЛЕДОВАНИЕ ЧАСТОТНЫХ ХАРАКТЕРИСТИК ПАССИВНЫХ КОРРЕКТИРУЮЩИХ ЗВЕНЬЕВ
1. Цель работы
Цель выполняемой лабораторной работы состоит в экспериментальном определении частотных характеристик пассивных дифференцирующих и интегрирующих звеньев.
2. Основные теоретические положения
При разработке, проектировании и создании систем автоматического регулирования приходится решать задачи, которые связаны с улучшением качества процесса регулирования. Качество работы любой системы регулирования определяется величиной ошибки, равной разности между требуемым и действительным значениями регулируемой величины.
Для определения качественных показателей системы регулирования используются критерии качества. К критериям качества относятся критерии точности системы регулирования, критерии, определяющие величину запаса устойчивости систем, критерии, определяющие быстродействие систем регулирования и другие. Улучшение качества процесса регулирования связано с решением двух основных задач - изменение динамических свойств системы регулирования с целью получения необходимого запаса устойчивости и быстродействия, и повышение точности в типовых режимах. Удовлетворительное решение задачи достижения как требуемого запаса устойчивости, так и быстродействия и точности регулирования может быть достигнуто с помощью различных методов, одним из которых является изменение структуры системы. Для этой цели обычно используется введение в систему регулирования корректирующих устройств.
Основное назначение корректирующего устройства состоит в изменении динамических свойств системы в направлении желаемых характеристик, что проявляется в изменении усиления по отдельным гармоникам или только в той области частот, которая оказывается существенной для формирования той или иной динамической характеристики.
Влияние корректирующего устройства на динамические свойства системы проявляется также и в изменении её фазовой
характеристики. Корректирующие устройства могут вводиться в систему регулирования различными способами. По виду введения в систему регулирования корректирующие устройства подразделяются на следующие основные типы:
а) последовательные корректирующие устройства;
б) параллельные корректирующие устройства;
в) местные обратные связи.
Использование того или иного типа корректирующих устройств определяется удобством технической реализации.
Звенья последовательного типа удобно применять в тех случаях, когда в системе регулирования используется электрический сигнал в виде напряжения постоянного тока, величина которого связана линейной зависимостью с сигналом ошибки.
Корректирующие звенья последовательного типа наиболее просто могут быть выполнены на электрических R-, С- и L-элементах. Последовательные звенья из R-, С- и L-элементов называют пассивными последовательными корректирующими устройствами, так как они не содержат источников электродвижущих сил. Существует большое количество пассивных последовательных звеньев. Следует рассмотреть наиболее типовые из них и их некоторые свойства.
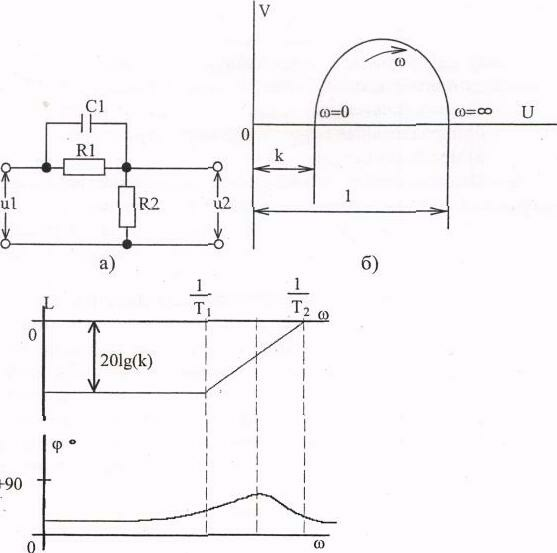
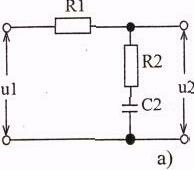
На рис.1а представлено пассивное дифференцирующее форсирующее звено состоящее из R -, С-элементов. Передаточная функция этого звена определяется следующим выражением:
![]()
![]()
Параметры и частотные характеристики дифференцирующего звена определяются следующими выражениями:
![]()
![]()
![]() ; L0
=20 lgk;
; L0
=20 lgk;
![]()

в)
Рис. 1
На рис.16 представлена амплитудно-фазовая характеристика (АФХ) дифференцирующего звена в виде полуокружности, расположенной в 1-м квадранте комплексной плоскости.
На рис.1 в приведены
логарифмическая амплитудно-частотная
- характеристика (ЛАЧХ) и логарифмическая
фазочастотная характеристика (ЛФЧХ),
соответствующие рассматриваемому
корректирующему звену. ЛАЧХ представлена
ломаной, у которой асимптота в диапазоне
частот
![]() имеет наклон +20 дб/дек.
имеет наклон +20 дб/дек.
Фазочастотная характеристика располагается в области положительного значения аргумента. Это свидетельствует о том, что дифференцирующее звено даёт опережение по фазе. Особенностью пассивной дифференцирующей цепи является уменьшение усиления на низких частотах и повышение чувствительности к помехам на высоких частотах. Вследствие этого дифференцирующие звенья подвержены влиянию помех, что является их недостатком. Коррекция, осуществляемая путём включения дифференцирующих звеньев последовательно в прямую цепь системы регулирования, позволяет без уменьшения запаса устойчивости увеличить частоту среза, а, следовательно, полосу пропускания и быстродействие системы. Одновременно увеличение коэффициента усиления приводит к уменьшению ошибки в установившемся режиме.
На рис.2а изображено пассивное интегрирующее звено, состоящее из R С-элементов. Передаточная функция этого звена определяется выражением:
![]()
![]()
Параметры и частотные характеристики интегрирующего звена определяются следующими выражениями:
![]()
![]()
![]()
![]()
![]()
б)
На рис.26 представлена АФХ
интегрирующего звена в виде полуокружности,
расположенной в 4-м квадранте комплексной
плоскости. ЛАЧХ и ЛФЧХ данного звена
изображены на рис.2в. ЛАЧХ представлена
ломаной, у которой асимптота в диапазоне
частот
![]() имеет наклон -20 дб/дек. ЛФЧХ располагается
в области отрицательного значения
аргумента. Интегрирующая цепь в диапазоне
частот
имеет наклон -20 дб/дек. ЛФЧХ располагается
в области отрицательного значения
аргумента. Интегрирующая цепь в диапазоне
частот
![]() вносит только отставание по фазе.
Особенностью пассивных интегрирующих
звеньев является уменьшение усиления
на высоких частотах.
вносит только отставание по фазе.
Особенностью пассивных интегрирующих
звеньев является уменьшение усиления
на высоких частотах.
Для компенсации этого ослабления в системе регулирования обеспечивается увеличение коэффициента усиления на низких частотах. Увеличение коэффициента усиления на низких частотах уменьшает ошибки в установившемся режиме и тем самым повышается статическая точность системы регулирования.
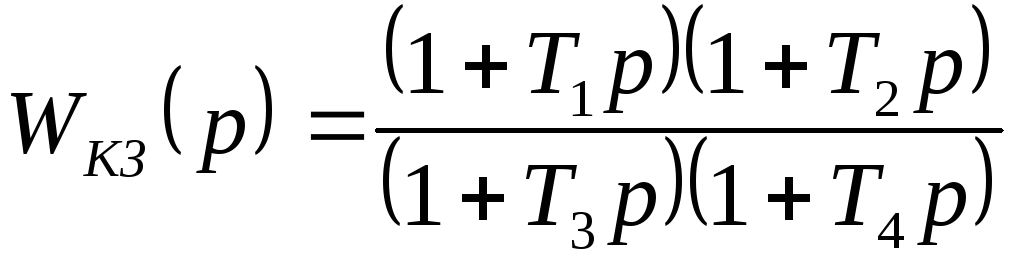
На рис.За представлено пассивное
интегро-дифференцирующее звено, состоящее
из КС-элементов. Передаточная функция
такого корректирующего звена определяется
выражением:
![]()
Параметры и частотные характеристики этого звена определяются следующими выражениями:
![]()
![]()
![]() ;
;![]()
![]()
![]()
![]()
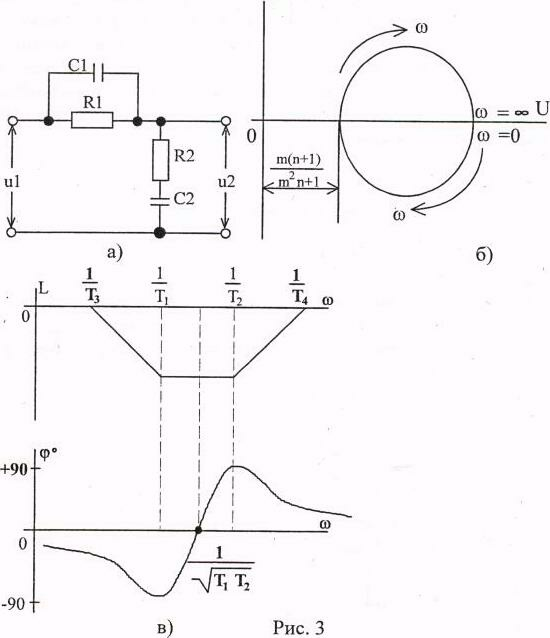
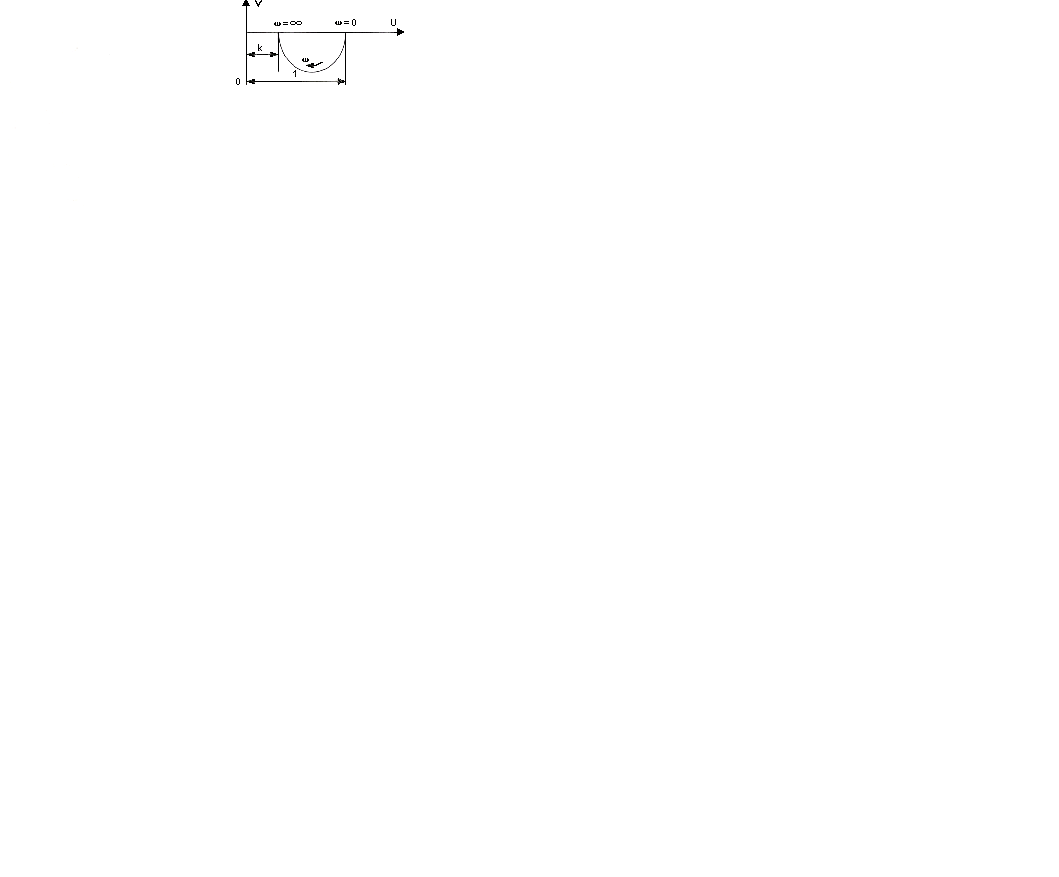
На рис.36 представлена АФХ
интегро-дифференцирующего звена,
изображённая в виде окружности,
расположенной в 1-м и 4-м квадрантах
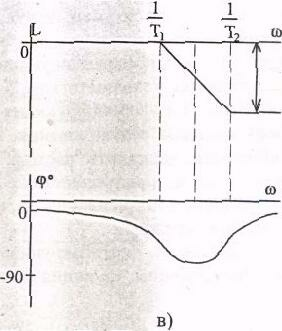
комплексной плоскости. ЛАЧХ и ЛФЧХ
представлены на рис.Зв. Из этих
характеристик видно, что при изменении
частоты в диапазоне
![]() данное звено вносит
отставание по
фазе.
данное звено вносит
отставание по
фазе.
При дальнейшем увеличении
частоты от
![]() до ∞ в системе возникает дифференцирующий
эффект и происходит опережение по фазе.
Коррекцию с помощью интегро-дифференцирующих
звеньев применяют в тех случаях, когда
необходимо, не уменьшая запаса
устойчивости, увеличить частоту среза
и полосу пропускания системы за счёт
введения опережения по фазе и увеличения
коэффициента усиления на высоких
частотах, а также уменьшить ошибки в
установившемся режиме и увеличить
быстродействие системы, увеличивая
коэффициент усиления на низких частотах.
Таким образом, для правильного
применения и использования
последовательных пассивных корректирующих
звеньев необходимо знать
их
частотные характеристики, которые
отражают основные особенности этих
звеньев.
до ∞ в системе возникает дифференцирующий
эффект и происходит опережение по фазе.
Коррекцию с помощью интегро-дифференцирующих
звеньев применяют в тех случаях, когда
необходимо, не уменьшая запаса
устойчивости, увеличить частоту среза
и полосу пропускания системы за счёт
введения опережения по фазе и увеличения
коэффициента усиления на высоких
частотах, а также уменьшить ошибки в
установившемся режиме и увеличить
быстродействие системы, увеличивая
коэффициент усиления на низких частотах.
Таким образом, для правильного
применения и использования
последовательных пассивных корректирующих
звеньев необходимо знать
их
частотные характеристики, которые
отражают основные особенности этих
звеньев.