

TMM кр
.docxМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ
РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ
ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«ВОРОНЕЖСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
ИНЖЕНЕРНЫХ ТЕХНОЛОГИЙ»
КАФЕДРА ТЕХНИЧЕСКОЙ МЕХАНИКИ
КОНТРОЛЬНАЯ РАБОТА
по дисциплине «Теория механизмов и машин»
Тема: «Структурный анализ плоских и пространственных кинематических цепей. Классификация механизмов».
Выполнил студент: 2 курса дистанционного обучения
Направление: 150302с
“Технологические машины и оборудование”
Шифр: 14-012
Ф.И.О.
Проверил: Е.В.Матвеева
Вариант 13.
Задание 1.
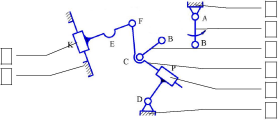
Дана структурная схема пространственного робота-
манипулятора.
Необходимо:
- определить число подвижных звеньев кинематической цепи;
- определить цепь замкнутая или разомкнутая, простая или
сложная;
- выписать все кинематические пары и дать их название;
- установить класс и степень подвижности каждой кинемати-
ческой пары;
- определить степень подвижности, заданной кинематической
цепи;
Решение:
Кинематическую цепь образуют пять подвижных звеньев
(n=4). Нумерация их показана на приведенном ниже рисунке.
Классификацию
всех кинематических пар представим в
табл. 2.
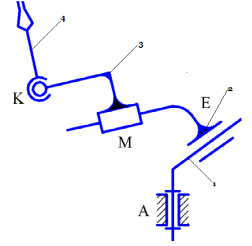
Табл2
|
Звенья образующие пару |
0-1 |
1-2 |
2-3 |
3-4 |
|
Обозначение |
А |
Е |
М |
К |
|
Название |
Вращательная |
Цилиндрическая |
Поступательная |
Сферическая |
|
Класс пары |
5 |
4 |
5 |
3 |
|
Подвижность |
1 |
2 |
1 |
3 |
Исследуемая кинематическая цепь является простой, так как каждое подвижное звено входит не более чем в две кинематические пары, и разомкнутой, так как звено 4 входит только в одну кинематическую пару.
Так как рассматриваемая кинематическая цепь пространственная, степень ее подвижности рассчитаем по формуле Сомова-Малышева:
W=6n-5p5-4p4-3p3-2p2-1p1 ,
где p5, p4, p3, p2 и p1 –число кинематических пар соответствующего класса. В результате получим:
W=6·5-5·2-4·1-3·1-2·0-1·0=7.
Задание 2
Дана структурная схема плоского механизма.
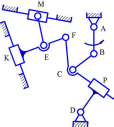
Рисунок 1 Структурная схема плоского механизма
Необходимо:
-
определить число подвижных звеньев кинематической цепи;
-
определить цепь замкнутая или разомкнутая, простая или сложная;
-
выписать все кинематические пары и дать их название;
-
установить класс и степень подвижности каждой кинематической пары;
-
определить степень подвижности заданной кинематической цепи;
-
разбить механизм на структурные группы Ассура;
-
выписать кинематические пары, которыми группа Ассура соединяется с основным механизмом и определить порядок каждой структурной группы;
-
для каждой структурной группы третьего и выше класса выписать ки-нематические пары, образующие наиболее сложный внутренний замкнутый контур и определить класс каждой структурной группы;
-
определить класс механизма;
-
записать схему образования механизма.
Решение:
Кинематическую цепь образуют девять подвижных звеньев (n = 7). Нумерация показана на рисунке. Классификацию всех кинематических пар
|
приведем в таблице 1. |
|
|
|
|
0 |
|
|
0 |
|
7 |
|
|
1 |
|
6 |
|
|
2 |
|
5 |
|
|
3 |
|
0 |
|
|
4 |
|
|
|
|
0 |
|
Рисунок 2 - Нумерация подвижных звеньев |
|
||
|
Таблица 1 Классификация кинематических пар |
|
||
|
|
|
|
|
|
Звенья, образующие пару |
Обозначение |
|
Название |
|
|
|
|
|
|
0-1 |
Вращательная |
|
А |
|
|
|
|
|
|
1-2 |
Вращательная |
|
В |
|
|
|
|
|
|
2-3 |
Вращательная |
|
С |
|
|
|
|
|
|
0-4 |
Вращательная |
|
D |
|
|
|
|
|
|
5-6 |
Вращательная |
|
E |
|
|
|
|
|
|
3-5 |
Вращательная |
|
F |
|
|
|
|
|
|
0-5 |
Поступательная |
|
K |
|
|
|
|
|
|
6-7 |
Вращательная |
|
M/ |
|
0-7 |
Поступательная |
|
M// |
|
3-4 |
Поступательная |
|
P |
|
|
|
|
|
Исследуемая кинематическая цепь является сложной, так как в ней имеются подвижные звенья, входящие более чем в две кинематические пары (звенья 3 и 5) и замкнутой, так как каждое подвижное звено входит в две и более кинематические пары.
Все кинематические пары относятся к кинематическим парам пятого класса. Их общее число - 10 (р5= 10). Рассчитаем степень подвижности цепи по формуле Чебышева:
W = 3n - 2p5 - 1p4 = 3·7 - 2·10 - 1·0 = 1.
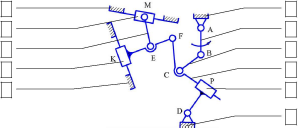
Выделим из рассматриваемой цепи структурные группы Ассура, т.е. кинематические цепи с нулевой степенью подвижности, следя за тем, чтобы оставшаяся цепь была замкнутой. Первой отсоединяем группу из двух под-вижных звеньев (6, 7) и трех кинематических пар: (5-6; 6-7; 7-0). Это группа Ассура второго(II)класса.
Отсоединенная группа двумя кинематическими парами (5-6) и (7-0) соединяется с основным механизмом, следовательно, порядок этой группы –
второй.
Отсоединенная группа и остаток показаны на рисунке.
|
0 |
|
|
0 |
|
|
7 |
|
|
|
|
|
|
|
1 |
|
|
|
6 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
5 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
Рисунок 2 - Отсоединенная группа и остаток |
|
|
|
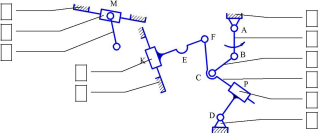
Выделим из оставшейся кинематической цепи следующую структур-ную группу. Это цепь из четырех подвижных звеньев (2, 3, 4 и 5) и шести ки-нематических пар – (0-5; 3-5; 0-4; 3-4; 2-3; 1-2). Изобразим остаток.
|
|
0 |
|
|
|
1 |
|
|
5 |
2 |
|
|
3 |
|
|
|
0 |
|
|
|
4 |
|
|
|
|
|
|
|
|
0 |
|
|
|
Рисунок 3 - Отсоединенная группа и остаток |
|
Отсоединенная группа тремя кинематическими парами (0-5; 0-4 и 1-2) соединяется с основным механизмом, следовательно,порядок этой группы
– третий.
Внутренний замкнутый контур в отсоединенной цепи один он образо-ван кинематическими парами (3-5; 4-5; 2-3). Их три, следовательно, это группа Ассура третьего класса(III).
В остатоке осталось входное звено, присоединенное к стойке, т.е.про-
стейший механизм первого класса.
Таким образом, механизм включает в себя одну группу Ассура второго класса и одну группу Ассура третьего класса.Наивысший класс структур-ной группы –третий, следовательно, это механизм третьего класса. Запи-шем схему образования механизма:
I(1) + III(2;3;4;5) +II(6;7) = M(III).
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
-
Артоболевский, И. И.Теория механизмов и машин[Текст] :учебник
-
И. И. Артоболевский. -М. : ИД Альянс, 2011.- 640 с.
-
Чернухин, Ю. В.Теоретическая механика.Теория меха-низмов и ма-шин [Текст] : учеб. пособие / Ю. В. Чернухин, А. В. Колтаков, А. В. Некра-сов; Воронеж. гос. ун-т инж. технол. – Воронеж : ВГУИТ, 2011. – 120 с.
Воронеж 2015