

Вопросы для самоконтроля
По каким признакам классифицирует электрические машины.
Какие серии асинхронных электродвигателей вызнаете? Приведите примеры маркировок асинхронных электродвигателей.
Как осуществляется выверка валов электродвигателя и рабочей машины.
Какие способы электронагрева вы знаете?
Какие требования предъявляются к монтажу электроводонагревателей?
Приведите технологию монтажа электрообогреваемого пола.
Какие источники оптического излучения вы знаете?
Для чего предназначена лампа типа ДРТ?
Что такое КОУ и для чего они применяются?
4. Дидактические материалы, используемые в процессе обучения
4.1. Материалы к лабораторным работам Лабораторная работа Технология монтажа асинхронных электродвигателей
Методика выполнения
1. На валы двигателя и машины насадить полумуфты или шкивы в зависимости от вида передачи. Способы насадки шкифов и подшипников на вал представлены на рис. 4.31.

Рисунок 4.31 Способы насадки шкивов и подшипников на вал: а-винтовым приспособлением; б-молотком с применением контргруза; в-снятие шкива съемником; г-посадка подшипников в гнездо; д-посадка подшипников на вал; 1-винтовое приспособление; 2-шкив; 3-электродвигатель; 4-контргруз; 5-съемник; 6-подшипник; 7-труба с заглушкой.
Во всех случаях валы двигателя и машины стремятся соединять непосредственно.
Соединение муфтами возможно, если выполняются условия:
-валы двигателя и машины расположены на одной прямой, концы их
-подходят вплотную или близко один к другому, а частота и направление вращения совпадают.
При невыполнении хотя бы одного из условий соединение осуществляют с помощью ременных (плоско-клино-, а иногда и круглоременных) или других передач.
Для нормальной работы привода, электродвигатель должен занимать строго определенное положение по отношению к машине. С этой целью при монтаже производят выверку передач.
При соединении муфтами необходимо, чтобы оси вала электродвигателя и машины находились на одной прямой линии. Для этого на ступицах полумуфт закрепляют специальные скобы или проволоки с заточенными концами и загнутыми под углом 900друг к другу. Полумуфты скрепляют болтами (не жестко) и, вращая их от руки, добиваются, чтобы расстояние между концами проволочек (или скоб) не изменялись как в вертикальной, так и в горизонтальной плоскостях. При этом машина остается жестко закрепленной на опорном основании, а перемещает электродвигатель, поворачивая или подбивая под его лапы клинья.
При ременной передаче добиваются, чтобы валы электродвигателя и машины располагались в параллельных плоскостях, а центры шкивов находились на одной прямой линии. Известны различные способы выверки ременных передач. Если межцентровое расстояние небольшое, а ширина обоих шкивов одинаковая, то, прикладывая линейку к шкивам, убеждаются, что все четыре крайних точки шкивов касаются линейки. В противном случае электродвигатель (не машину) перемещают, добиваясь нужного положения. При большом межцентровом расстоянии используют тонкую проволоку или нитку, которую пальцем прижимают к первой крайней точки на шкиве, а второй конец нитки подводят к следующей (четвертой) крайней точке. При этом добиваются, чтобы все четыре точки шкивов касались нитки одновременно (рис.4.32).
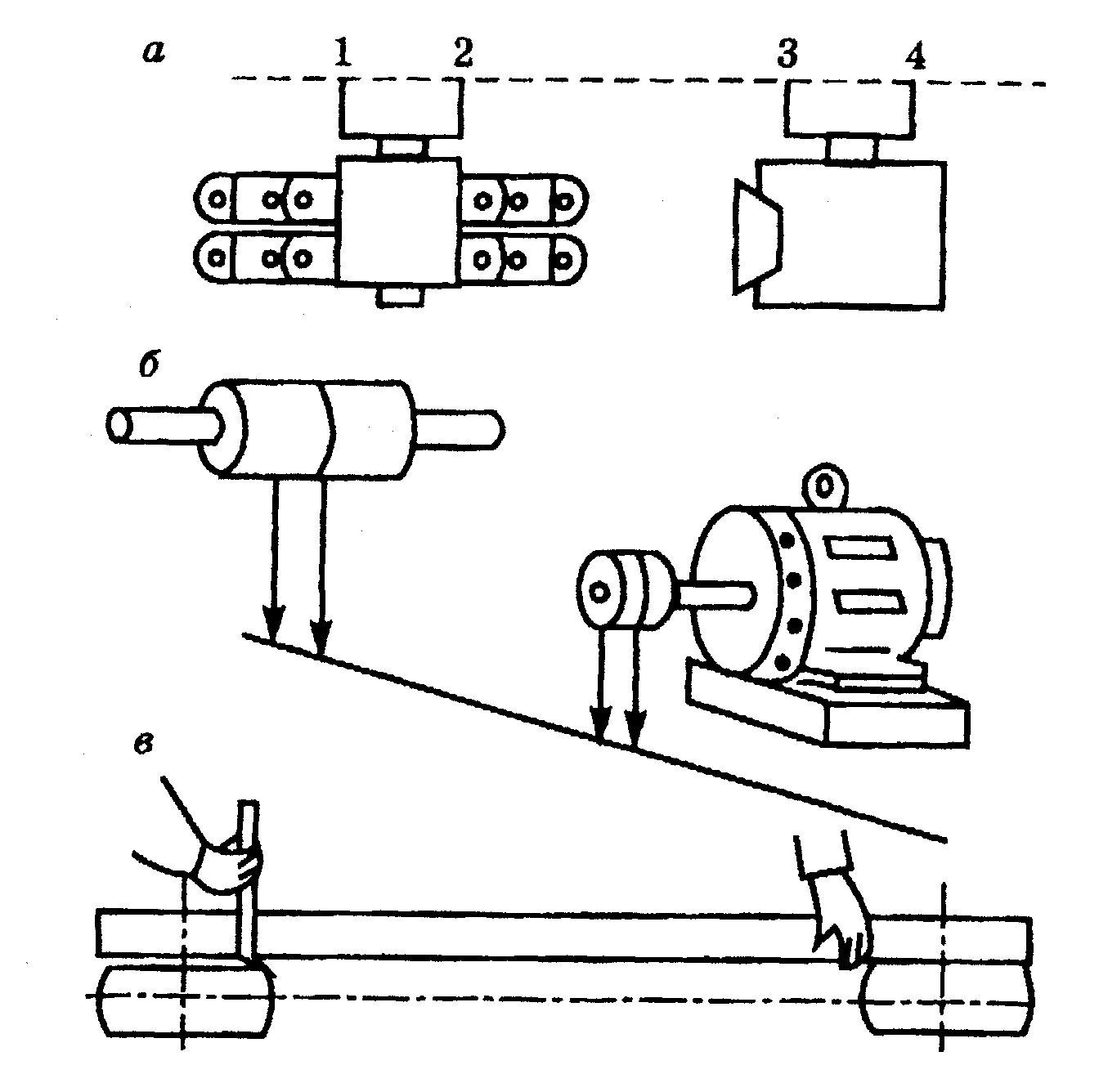
Рисунок 4.32 Выверка валов электродвигателя и машины, соединенных ременной передачей: а - при одинаковой ширине шкивов; б - при различной ширине шкивов с помощью отвесов; в - при различной ширине шкивов с помощью линейки.
После проверки правильностипередачи от электродвигателя к рабочей машине лабораторного стенда, необходимо провести выверку.
Зарисовать в отчет эскиз выверки соосности валов электродвигателя и рабочей машины.
2. Произвести технический осмотр электродвигателя: осмотреть корпус электродвигателя - нет ли трещин, вмятин, грязи и т.д. при необходимости почистить; осмотреть клеммную коробку, проверить и подтянуть контакты; проверить состояние подшипников; убедиться в свободном вращении ротора от руки. Мегаомметром на 500 В измерить сопротивление изоляции обмоток относительно друг друга и корпуса электродвигателя, определить целостность обмоток путем простой прозвонки.
Определение сопротивления изоляции при помощи мегаомметра производится в течение 60с при равномерном вращении рукоятки с частотой 2с-1. Значение сопротивления, отсчитанное на 60-й секунде (R60), и принимается за сопротивление изоляции обмотки по отношению к корпусу или другой обмотке при данной температуре.
Электродвигатели переменного тока напряжение до 1000 В должны иметь величину сопротивления изоляции обмоток статора не менее 0,5 МОм при температуре +10...300С.
Величина сопротивления изоляции обмоток ротора синхронных электродвигателей и электродвигателей с фазным ротором должна быть не менее 0,2 МОм при температуре +10...300С.
При меньших значениях сопротивления изоляции обмоток требуется тщательная их продувка (удаление проводящей пыли) или сушка изоляции (удаление влаги). В тех случаях, когда мегаомметр указывает на короткое замыкание обмотки, следует устранить неисправность.Чаще всего место короткого замыка- ния находится в клеммнике или на выходных концах обмоток электродвигателя. Перед монтажом следует убедиться в соответствии исполнения двигателя условиями окружающей среды.
Результаты технического осмотра электродвигателя записать по форме табл.4.12.
Таблица 4.12Результаты технического осмотра электродвигателя
|
Состояние электродвигателя |
Обмотки электродвигателя | |||||||||||
|
Корпус |
Подшипники |
Коробка выводов |
Вращение ротора |
Целостность (+) обрыв (-) |
Сопротивление изоляции | |||||||
|
Фаза А |
Фаза В |
Фаза С |
А-N |
В-N |
С-N |
А-В |
В-С |
С-А | ||||
3. Маркировка выводных концов обмоток электродвигателя методом Петрова заключается в том, что один из выводов обмотки принимается за начало одной из фаз, а конец ее соединяют с выводом другой фазы. Эти две последовательно соединенные фазы включаются на пониженное напряжение (15...20% от номинального) во избежание перегрева обмоток; в случае фазного ротора его обмотка должна быть разомкнута. Третья фаза присоединяется к контрольной лампе или вольтметру.
Если ЭДС этой фазы равна нулю, то первые две соединены одноименными выводами (будем считать их концами). Далее опыт повторяется таким образом, что фаза, ранее подключенная к вольтметру или контрольной лампе, меняется с одной из двух фаз, подключенных к сети. Найденные начала фаз обозначаются С1, С2, С3, концы, соответственно С2, С5, С6. Дальнейшее соединение обмоток производится в зависимости от напряжения питающей сети. Если напряжение сети 380/220 В, являющееся наиболее распространенным, то соединение обмоток электродвигателя производят в "звезду" - концы обмоток соединяют вместе, а на их начало подают питающее напряжение. Если напряжение сети 220/127 В, что является мало распространенным, то конец первой фазы соединяют с началом второй (С4 и С2), конец второй - с началом третьей (С5 и С3), конец третьей - с началом первой (С6 и С1), а в месте соединения подают питающее напряжение (рис.4.33).

Рисунок 4.33Схема соединения выводов обмоток электродвигателя с целью их маркировки: а-определение выводов 1-й и 2-й обмоток; б-определение выводов 3-й обмотки.

Рисунок 4.34Схемы соединения проводов обмоток электродвигателя: а-соединение обмоток звездой; б-соединение треугольником.
Определив и промаркировав концы обмоток, подсоединить их к клеммной коробке в соответствии с рис.4.34, соединив их в "звездочку". Зарисовать в отчете схемы соединения выводов электродвигателя с целью их маркировки (по методу Петрова) и схему соединения выводов обмоток электродвигателя к клеммной коробке.
4. На основании приведенной принципиальной схемы (рис.4.35) составить схему соединений адресным способом.
Собрать схему управления асинхронным электродвигателем. Выполнить зануление корпуса электродвигателя, металлического корпуса электромагнитного пускателя и кнопочной станции. Собранную схему предъявить руководителю занятий и по его разрешению включать в сеть и опробовать работу оборудования. Выключить рубильник и поменять местами любые две фазы на зажимах электродвигателя или пускателя. Включить рубильник и, нажав кнопку "пуск", убедиться, что направление вращения вала электродвигателя изменилось. Выключить электродвигатель, нажав кнопку "стоп", выключить рубильник, разобрать схему.
5. Собрать схему управления асинхронным электродвигателем с помощью реверсивного электромагнитного пускателя (рис.4.36). Выполнить зануление корпуса электродвигателя, металлического корпуса электромагнитного пускателя и кнопочной станции (рис 4.37). Собранную схему предъявить преподавателю и по его разрешению включать в сеть и опробовать работу оборудования. Убедиться в изменении направления вращения вала электродвигателя. Категорически запрещается торможение электродвигателя руками или ногой.
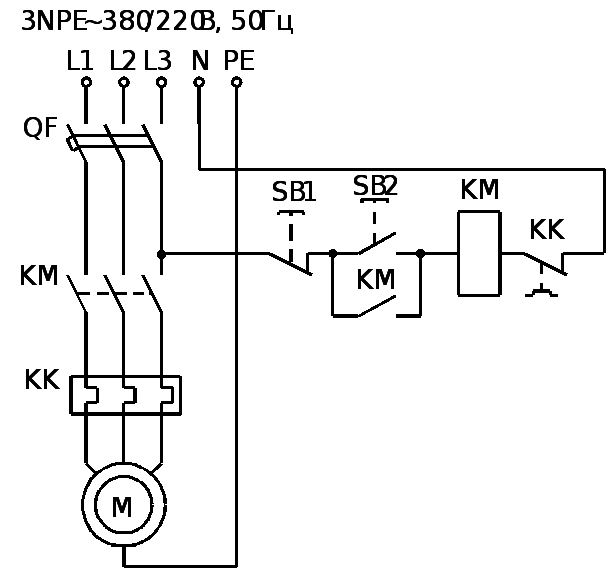
Рисунок 4.35Управление асинхронным короткозамкнутым электродвигателем при помощи нереверсивного электромагнитного пускателя и кнопочной станции. Схема электрическая принципиальная.
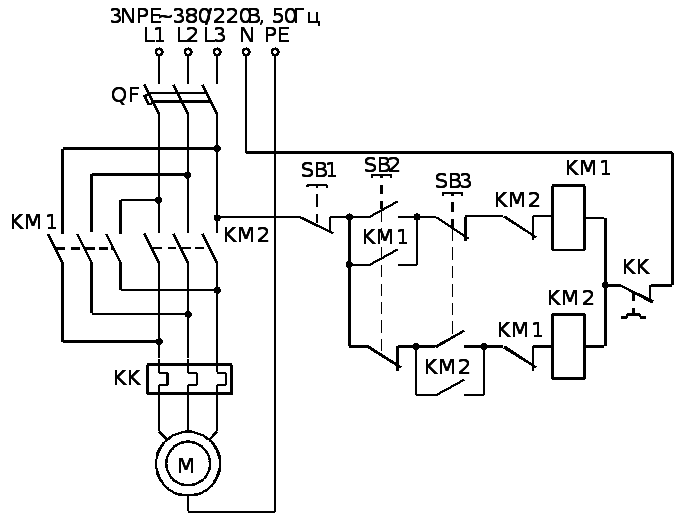
Рисунок 4.36Управление асинхронным короткозамкнутым электродвигателем при помощи реверсивного электромагнитного пускателя и кнопочной станции. Схема электрическая принципиальная.

Рисунок 4.37Способы подводки электропроводок и зануляющих проводников:
а-в трубах к двигателю мощностью до 5,5 кВт; б-в трубах к двигателю мощностью до 40 кВт; в-гибким вводом; г-подклю-чение к корпусу зануляющего проводника; д-гибкой перемы- чкой для зануления; 1-коробка; 2-муфта; 3-контргайка; 4-трубы; 5-гибкий ввод; 6-шайба; 7-стальной трос; 8-флажок.
Содержание отчета.
Цель и программа работы. Таблица с результатами технического осмотра электродвигателя. Схема соединения выводов обмоток электродвигателя с целью их маркировки (метод Петрова). Эскиз выверки валов электродвигателя и рабочей машины при соединении их муфтами. Принципиальная электрическая схема и схема соединения для управления асинхронным короткозамкнутым электродвигателем при помощи электромагнитных пускателей и кнопочной станции. Выводы.
Контрольные вопросы для защиты лабораторной работы
1 Уровень
1. Что называют электродвигателем?
2. Что называют генератором?
3. Что является однофазным двигателем?
4. Что такое «скольжение» асинхронного электродвигателя?
2 Уровень
1. Приведите маркировку асинхронных электродвигателей.
2. Приведите классификацию электрических машин.
3. Какие известны способы выверки валов электродвигателя и рабочее машины.
4. Как проводится выверка валов электродвигателя и рабочей машины.
5. Опишите суть метода Петрова.
3 Уровень
1. Приведите схему управления реверсивным электроприводом.
2. Приведите требования к монтажу асинхронного электродвигателя.
3. Способы подводки электропроводок и зануляющих проводников к асинхронным электродвигателям.
4.Схемы соединения проводов обмоток электродвигателя.
Лабораторная работа
Монтаж осветительных и облучательных установок.
Основные понятия и определения.
Для освещения административных и общественных зданий служат светильники общего назначения, которые должны обеспечить их освещенность. В настоящее время различают освещение общее, равномерное, локализованное и комбинированное (общее с местным). В основных помещениях зданий создается общее равномерное освещение, при котором рабочие поверхности освещаются в любом месте практически одинаково. Локализованное освещение применяют в отдельных помещениях, где необходимы определенные условия в отдельных зонах и на рабочих местах.
В промышленных зданиях освещение может быть общим и местным. Общее освещение используют как внутри производственных помещений, так и для освещения территорий (наружное освещение). При монтаже осветительных установок внутри производственных помещений светильники подвешивают к потолкам, фермам и тросам на штангах или непосредственно к трубам электропроводок и осветительным шинопроводам. На стенах, колоннах, мостиках и площадках обслуживания их крепят на кронштейнах. Большинство светильников с лампами накаливания мощностью до 500 Вт можно подвешивать на высоте до 6 м от пола, а мощностью 500 Вт и более – до 12 м.
Светильники необходимо правильно устанавливать не только по высоте, но и в ряду, чтобы световой поток направлялся вниз (при отсутствии в проекте других указаний). Для аварийного освещения применяют светильники, которые окрашивают в другой цвет или на них наносят специальные знаки.
Для осветительных сетей помещений, жилых, культурнобытовых, общественных и промышленных зданий и сооружений используют различные схемы соединений выключателей и переключателей и их включения в сеть.
В производственных зданиях применяют местное, централизованное, дистанционное и автоматическое управление освещением, а в ряде случаев и смешанные способы управления.
При местном управлениииспользуют выключатели, переключатели илидругие простые аппараты, установленные у входа или внутри освещаемых помещений,
Централизованное управлениеосвещением применяется для крупных производственных помещений, где нецелесообразно устанавливать большое количество выключателей. Оно осуществляется чаще всего с групповых щитков с помощью автоматических выключателей. Для такого вида управления освещением выбирают место, где организовано постоянное дежурство персонала.
Дистанционное управлениеиспользуется в крупных производственных зданиях, где освещение питается от нескольких подстанций, при этом не требуется управление с нескольких мест. Оно осуществляется магнитными пускателями или контакторами, устанавливаемыми на щитах станций управления (ЩСУ) или в шкафах управления (ШУ) и включенными в цепи линий питающей осветительной сети.
Автоматическое управление(без
участия человека) осуществляется при
изменении световых условий, создаваемых
в помещениях с естественным освещением,
или по заранее заданному суточному
графику с помощью фотоэлектрических
автоматов, принцип действия которых
состоит в следующем: на устанавливаемый
в помещении вблизи окна выносной
фотодатчик падает естественный свет.
При изменении естественной освещенности
меняется ток в цепи фотодатчика, а
следовательно, и в цепи реле
фотоэлектрического автомата. При ее
уменьшении ниже определенного уровня
реле срабатывает и его контакт
замыкается. Для автоматического
управления освещением в подъездах, на
лестничных клетках, в коридорах жилых
и общественных зданий выпускаются
вводно-распределительные устройства
с фотоэлектрическими датчиками.
Рисунок4.38Схемы соединений и включения в сеть выключателей и переключателей.
Промышленность выпускает большое количество различных выключателей и переключателей, с помощью которых реализуются разнообразные схемы управления освещением (рис. 4.38).
Включение светильников производится непосредственным присоединением к фазному и нулевому проводам питающей сети. Схемы управления предусматривают использование различных выключателей и переключателей в качестве коммутирующих аппаратов. Кроме этого при разработке принципиальных схем осветительных электропроводок необходимо учитывать возможность подключения бытовых электроприборов и электрифицированного инструмента. Это осуществляется при помощи штепсельных розеток, которые подключаются непосредственно к проводам питающей сети. Принципиальная схема осветительной сети и коридорные схемы управления освещением приведены на рис. 4.39 и 4.40.

Рисунок4.39Принципиальная схема осветительной
сети.
Рисунок 4.40Коридорные схемы управления освещением:а- из двух мест; б- из двух мест с транзитной фазой; в- из трех мест; г- с помощью пускателей или реле.