

kinematika
.pdfПрименим теорему о сложении скоростей на примере движения упомянутой мухи. На рис. 14.2 покажем пластинку (вид сверху) и муху в т. В. Допустим, закон относительного движения мухи задан уравнением
|
Sr = f (t), м. |
|
Напомним, что относительное движение мухи – ее |
Рис. 14.2 |
движение по отношению к пластинке. Траектория |
|
относительного движения – отрезок АО. Предположим, в момент времени t = t1 муха оказалась в т. В. Тогда расстояние
AB = Sr1 = f (t1 ), м.
Относительная скорость мухи в общем случае равна
Vr = dSdtr = S•r , м/с.
→
Направлен вектор Vr от точки В к точке О.
Переносная скорость мухи – это скорость той точки пластинки, в которой в данный момент времени находится муха, т.е. скорость т. В пластинки. Скорость точки вращающегося твердого тела равна
Ve = ωe OB, м/с.
где: ωe - угловая скорость переносного движения (для нашего случая это угловая скорость вращения пластинки), с-1;
OB - кратчайшее расстояние от точки В до оси вращения пластинки, м.
→
Вектор Ve направлен перпендикулярно ОВ в сторону угловой скорости ωe (см.
рис. 14.2).
→
Абсолютная скорость мухи по модулю равна (учитываем, что угол между Vr и
→
Ve равен 900):
Va = 
 Vr2 +Ve2 , м/с.
Vr2 +Ve2 , м/с.
© Кафедра ТПМ ДонНАСА |
59 |
к оглавлению
→
Направление вектора Va показано на рис. 14.2.
→ →
Если же угол между векторами Vr и Ve α ≠ 900, то модуль абсолютной скорости точки вычисляется по формуле:
Va = 
 Vr2 +Ve2 + 2 Vr Ve cos α, м/с. 14.2. Теорема о сложении ускорений.
Vr2 +Ve2 + 2 Vr Ve cos α, м/с. 14.2. Теорема о сложении ускорений.
14.2.1. Сложение ускорений при поступательном переносном движении.
При поступательном переносном движении абсолютное ускорение точки равно геометрической сумме относительного и переносного ускорений:
|
→ → |
→ |
|
|
aA = ar |
+ ae , |
(14.1) |
→ |
- относительное ускорение точки, м/с2. |
|
|
где: ar |
|
||
→ |
- переносное ускорение точки, м/с2. |
|
|
ae |
|
|
|
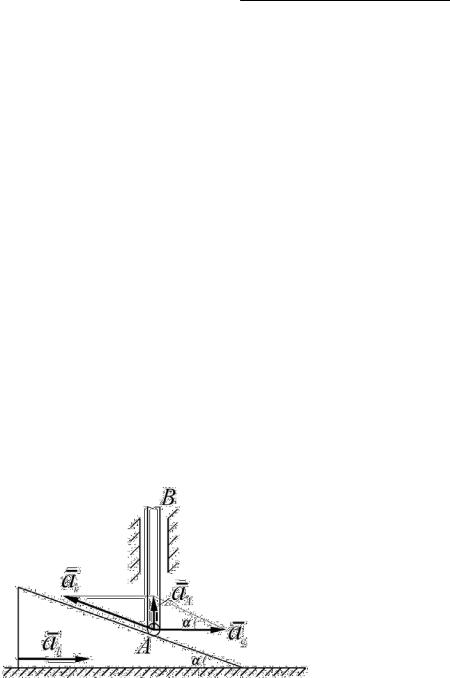
Задача. Клин, движущийся горизонтально с ускорением а1, перемещает вдоль вертикальных направляющих стержень АВ (рис. 14.3). Определить ускорение
стержня, если угол клина равен α. |
|
|
|
|
|
|
Решение. Абсолютное ускорение a→A |
точки А стержня направлено по |
|||||
вертикали вверх. Его можно рассматривать |
||||||
как |
слагающееся |
из |
относительного |
|||
|
→ |
|
|
|
|
|
ускорения ar , направленного вдоль щеки |
||||||
|
|
|
|
|
→ |
|
клина, |
и переносного |
ускорения |
ae |
, |
||
|
|
|
→ |
|
|
|
равного ускорению |
клина a1 |
(так |
как |
|||
Рис. 14.3 |
переносное движение, т.е. движение клина, |
|
является при этом поступательным). Строим соответствующий параллелограмм и
→ → |
|
|
учитывая, что ae = a1 |
, находим: |
|
|
|
aa = a1tgα. |
© Кафедра ТПМ ДонНАСА |
60 |
|
к оглавлению

Величина aa и определяет ускорение стержня.
14.2.2. Сложение ускорений при непоступательном переносном движении. Теорема Кориолиса.
Абсолютное ускорение точки равно геометрической сумме трех ускорений: относительном, характеризующего изменение относительной скорости в относительном движении; переносного, характеризующего изменение переносной скорости точки в переносном движении, и кориолиса, характеризующего изменение относительной скорости точки в переносном движении и переносной скорости точки в относительном движении:
→ → |
→ → |
|
|
aA = ar |
+ ae + ak |
, |
(14.2) |
→
где: ar - относительное ускорение точки, м/с2;
→
ae - переносное ускорение точки, м/с2;
→
ak - ускорение Кориолиса, м/с2.
В общем случае относительное и переносное ускорения точки складываются из нормального и касательного ускорений, т.е.
→ |
→ → |
|
= arn + arτ |
|
|
ar |
и |
Тогда уравнение (14.2) с учетом (14.3) примет вид:
→ →n →τ →n →τ →
aA = ar + ar + ae + ae + ak .
→ |
→ → |
|
ae = aen + aeτ . |
(14.3) |
|
14.2.3. Вычисление относительного, переносного и кориолисова ускорения. Относительное ускорение точки, при заданном законе относительного
движения Sr = f (t), вычисляется по известным формулам кинематики точки:
ar = 
 (arn )2 + (arτ )2 .
(arn )2 + (arτ )2 .
Относительное нормальное ускорение:
an =Vr2 , м/с2.
r ρ
© Кафедра ТПМ ДонНАСА |
61 |
к оглавлению
где: Vr - относительная скорость точки, м/с; ρ - радиус кривизны траектории, м. Относительное касательное ускорение
τ |
|
d 2Sr |
|
dV |
2 |
|
|
ar |
= |
|
= |
r , м/с |
. |
||
dt2 |
|||||||
|
|
|
dt |
|
|
||
Как уже установлено, переносное ускорение точки равно ускорению той точки твердого тела, в которой в данный момент времени находится рассматриваемая точка. Другими словами, переносное ускорение определяется методами кинематики твердого тела. Переносное ускорение равно геометрической сумме переносных нормального и касательного ускорений точки. Переносное нормальное ускорение точки равно:
aen = ωe2 h, м/с2.
где: ωe - угловая скорость переносного вращения, с-1;
h – кратчайшее расстояние от рассматриваемой точки до оси вращения твердого тела, м.
Переносное касательное ускорение определяется по формуле: aeτ = εe h, м/с2.
где: εe - угловое ускорение переносного вращения, с-2. Кориолисово ускорение в векторном виде равно:
→ |
→ |
→ |
(14.4) |
||
a |
k |
= 2(ω |
×V |
), м/с2. |
|
|
e |
r |
|
|
|
Таким образом, кориолисово ускорение точки равно удвоенному векторному произведению угловой скорости переносного движения на относительную скорость
|
|
|
|
→ |
|
→ |
|
|
точки. Если угол между векторами |
|
Vr |
и |
ωe |
обозначить |
α, то по модулю |
||
кориолисово ускорение равно: |
|
|
|
|
|
|
|
|
a |
k |
= 2ω |
e |
V sin α, м/с2. |
(14.5) |
|||
|
|
|
r |
|
|
|
||
© Кафедра ТПМ ДонНАСА |
62 |
к оглавлению
|
|
→ |
|
|
|
→ → |
|
Направлен |
вектор |
ak |
так же, |
как |
вектор |
ωe×Vr , |
т.е. перпендикулярно |
|
|
|
|
→ |
→ |
|
|
плоскости, проходящей через векторы ωe |
и Vr в ту сторону, откуда кратчайшее |
||||||
→ |
→ |
|
|
|
|
|
|
совмещение ωe |
с Vr видим происходящим против хода часовой стрелки. |
||||||
Для определения |
направления |
кориолисова |
ускорения |
удобно пользоваться |
|||
правилом Жуковского: чтобы найти направление кориолисова ускорения, следует спроектировать относительную скорость точки на плоскость, перпендикулярную оси переносного вращения, и повернуть эту проекцию в той же плоскости на 900 в сторону переносного вращения.
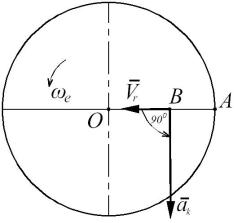
Воспользуемся правилом Жуковского для определения кориолисова ускорения
|
«мухи» (рис. |
14.4, вид |
сверху). Относительная |
|
|
|
|
→ |
|
|
скорость мухи Vr направлена от точки В к точке О и |
|||
|
уже лежит |
в |
плоскости, |
перпендикулярной оси |
|
|
|
|
→ |
|
переносного |
вращения. Поворачиваем вектор Vr в |
||
|
этой плоскости на 900 в сторону переносного |
|||
|
вращения (по направлению ωe ). Получаем вектор |
|||
Рис. 14.4 |
|
|
|
→ |
кориолисова ускорения мухи ak . |
||||
Из формулы (14.5) видно, что кориолисово ускорение может обращаться в ноль в следующих случаях:
1) Когда ωe =0 , т.е. когда переносное движение является поступательным или если угловая скорость переносного вращения в данный момент времени равна нулю. 2) Когда Vr = 0 , т.е. когда относительная скорость в данный момент времени обращается в ноль.
3) Когда α = 0 или α = 1800, т.е. когда относительное движение происходит по направлению, параллельному оси переносного вращения, или если в данный момент
→
времени вектор Vr параллелен этой оси.
© Кафедра ТПМ ДонНАСА |
63 |
к оглавлению
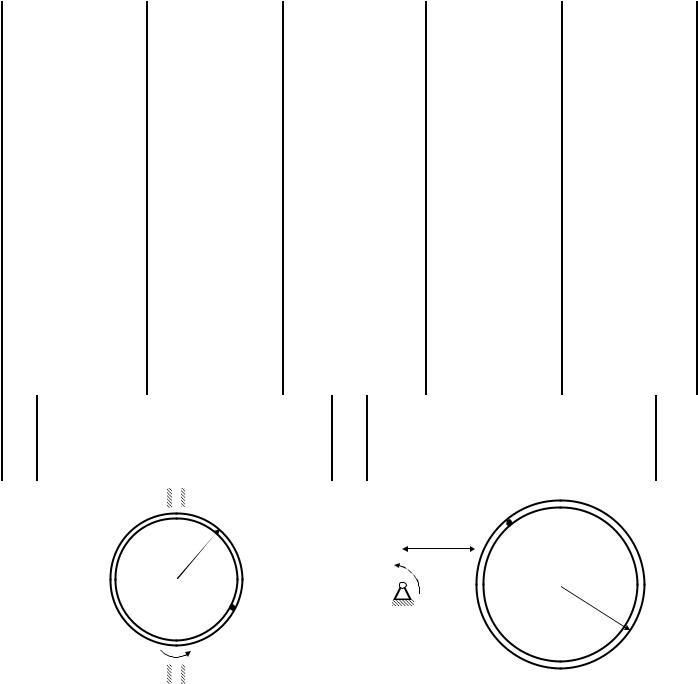
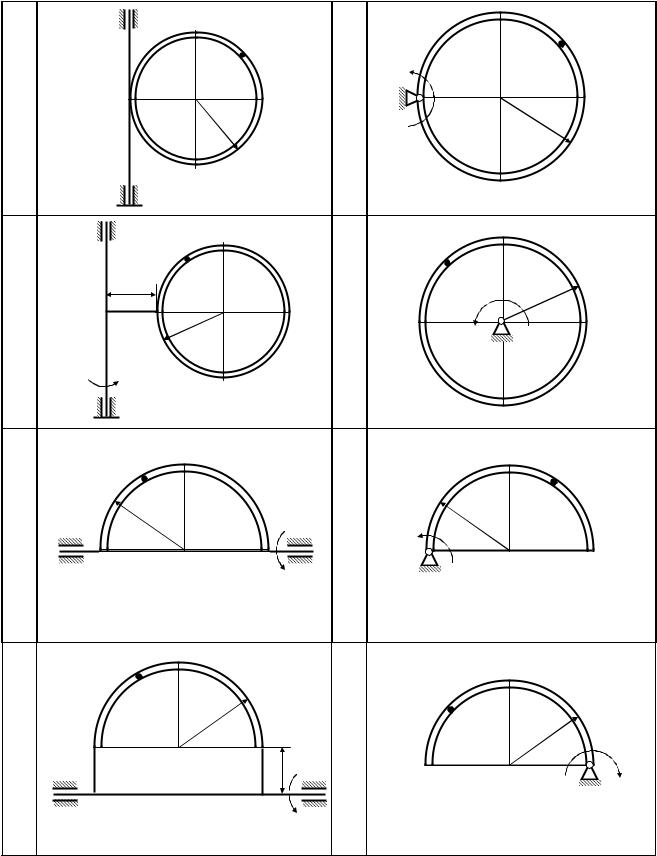
15. Задание К4. Сложное движение точки. Определение абсолютной скорости и абсолютного ускорения точки.
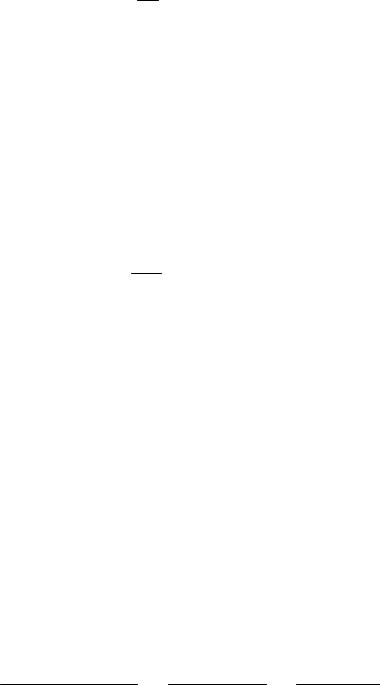
Точка М движется относительно тела В (рис. К4.1). По заданным уравнениям относительного движения точки М и движения тела В (таблица К4-1) определить для момента времени t =t1 абсолютную скорость и абсолютное ускорение точки М.
Указание: схему на рис. К4.1 выбирать в соответствии с последней цифрой шифра.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица К4-1 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Предпоследняя |
φе, рад |
|
|
|
R, см |
t1, с |
|||||||||||||||
цифра шифра |
Sr =OM , см |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
t2 |
|
|
|
|
πt2 |
|
12 |
2 |
|
|
|||||
2 |
|
|
|
|
|
t2 + |
t |
|
1,5πt2 |
|
18 |
2 |
|
|
|||||||
3 |
|
|
|
|
2t2 - |
2t |
|
2πt2 |
|
24 |
2 |
|
|
||||||||
4 |
|
|
|
|
|
1,5t2 |
|
|
|
2,5πt2 |
|
30 |
2 |
|
|
||||||
5 |
|
|
|
|
|
2t2 |
|
|
|
|
3πt2 |
|
18 |
1 |
|
|
|||||
6 |
|
|
|
|
|
2,5t2 |
|
|
|
4πt2 |
|
24 |
2 |
|
|
||||||
7 |
|
|
|
|
2,5t2 - |
|
2t |
|
5πt2 |
|
30 |
2 |
|
|
|||||||
8 |
|
|
|
|
3t2 - |
4t |
|
6πt2 |
|
18 |
1 |
|
|
||||||||
9 |
|
|
|
|
1,5t2 - |
t |
|
8πt2 |
|
16 |
1 |
|
|
||||||||
0 |
|
|
|
|
0,5t2 + |
|
t |
|
10πt2 |
|
30 |
1 |
|
|
|||||||
варіант |
|
|
|
|
|
|
варіант |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
R |
|
|
|
|
2 |
|
|
|
R |
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O1 |
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
B |
|
M |
|
|
|
|
ϕ |
e |
O |
|
R |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
O |
|
|
ϕ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
© Кафедра ТПМ ДонНАСА |
64 |
к оглавлению
3 |
|
4 |
|
M |
|
M |
|
|
|
|
ϕe |
|
|
|
|
|
|
|
|
|
O |
|
B |
O |
|
O1 |
|
||
B |
R |
|
R |
|
|
|
|||
|
|
|
|
 ϕe
ϕe
5 |
6 |
|
|
M |
|
M |
|
R |
|
R |
|
O R |
O |
O1 |
|
ϕe |
|||
B |
|
||
ϕe |
|
B |
|
7 |
8 |
|
M |
|
M |
|
|
|
R |
|
B |
ϕe |
R |
|
B |
|
|
O |
O1 |
O |
|
||
|
|
ϕe |
9 |
M |
0 |
|
|
|
|
|
|
|
|
R |
|
M |
|
|
|
B |
|
|
|
B |
|
R |
|
|
O |
|
|
|
|
R ϕe |
O |
O1 |
ϕe |
|
|
|
Рис. К4.1
© Кафедра ТПМ ДонНАСА |
65 |
к оглавлению
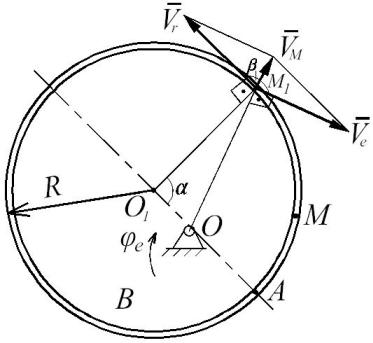
16. Пример выполнения задания К4. |
|
||||||
Условие |
задачи: |
Точка М движется относительно |
тела В (рис. 16.1). По |
||||
|
|
|
|
|
|
|
|
заданным уравнениям относительного движения точки М Sr = AM =12πt 2 + πt (см) |
|||||||
и движения тела В ϕ |
e |
=5t 2 + 2t −3 (рад) определить для момента времени t =t = 2 с |
|||||
|
|
|
|
|
|
1 |
|
абсолютную скорость и абсолютное ускорение т. М, если R =100см, OO1 = 0,5R. |
|||||||
Дано: S |
|
|
|
|
|
=5t 2 + 2t −3 , рад; |
t =t = 2 с; |
r |
= AM =12πt 2 + πt , см; ϕ |
e |
|||||
|
|
|
|
|
1 |
||
R =100см, OO1 = 0,5R.
—————————————————————————————————
Найти: VM - ? aM - ?
Рис. 16.1
Решение.
Точка М совершает сложное движение. Относительное движение точки М –
движение по окружности радиуса R по закону Sr = AM =12πt2 + πt (см). Переносное движение – движение точки вращающегося тела В, в которой в данный момент времени t =t1 находится точка М, относительно оси О.
1. Определим положение т. М при t =t1 = 2 с:
© Кафедра ТПМ ДонНАСА |
66 |
к оглавлению
Sr =OM1 =12πt12 + πt1 =12π 22 + π 2 =50π, см.
Угол α (см. рис. 16.1) равен:
α = SRr = 10050π = π2 , рад.
На рис. 16.1 показываем точку М при t =t1 - точка М занимает положение М1. 2. Определение абсолютной скорости точки.
Абсолютная скорость точки М равна геометрической сумме скоростей относительной и переносной:
→ → →
VM =Vr +Ve .
Относительная скорость т. М:
V r= dSdtr = 24πt + π, см/с.
При t =t1 относительная скорость точки равна:
V r= 24πt1 + π= 24π 2 + π = 49π, см/с.
→
Вектор Vr показываем на рис. 16.1. Переносная скорость точки М:
V e= ωe OM1, см/с.
Угловая скорость переносного вращения:
ωe =ϕ•e =10t + 2, с-1.
При t =t1 угловая скорость переносного вращения равна:
ωe =10t1 + 2 =10 2 + 2 = 22, с-1.
Определим расстояние ОМ1:
OM1 = 
 (O1M1 )2 + (OO1 )2 =
(O1M1 )2 + (OO1 )2 = 
 R2 + (0,5R)2 =
R2 + (0,5R)2 = 
 1002 +502 =119 см.
1002 +502 =119 см.
Таким образом, переносная скорость равна:
V e= 22 119 = 2620 см/с.
→
Вектор Ve показываем на рис. 16.1.
© Кафедра ТПМ ДонНАСА |
67 |
к оглавлению

→ →
Найдем угол β между векторами Vr и Ve . Из построения следует, что
β =1800 − OM1O1.
Синус OM1O1 равен:
sin( OM1O1 )= OO1 = 50 = 0,42.
OM1 119
Следовательно, OM1O1 = 250, и
β =1800 − 250 =1550.
Модуль абсолютной скорости точки М равен:
VM = 
 Vr2 +Ve2 + 2 Vr Ve cos β =
Vr2 +Ve2 + 2 Vr Ve cos β =
= 
 (49π)2 + 26202 + 2 49π 2620 (− 0,91)= 2480 см/с.
(49π)2 + 26202 + 2 49π 2620 (− 0,91)= 2480 см/с.
Показываем вектор V→M на рис. 16.1.
3. Определение абсолютного ускорения т. М. Абсолютное ускорение т. М найдем по теореме Кориолиса:
→ |
|
→ |
→ → → |
→ |
|
|
aM |
= arn |
+ arτ+ aen + aeτ |
+ ak . |
(16.1) |
||
Относительное нормальное ускорение: |
|
|
|
|||
n |
Vr2 |
= |
(49π)2 |
|
2 |
|
ar = |
R |
100 |
= 237 см/с . |
|
||
|
|
|
|
|
||
→
Вектор arn показываем на рис. 16.2.
|
Рис. 16.2. |
© Кафедра ТПМ ДонНАСА |
68 |
к оглавлению