

Конспект лекций электротехника
.pdfТакое расположение выводов обмоток позволяет легко соединять с помощью специальных пластин обмотки статора звездой или треугольником.
Пересоединение обмотки статора позволяет использовать один и тот же двигатель при двух напряжениях. Например, если двигатель расчитан на работу при соединении обмоток статора звездой при 380 В, то он может развивать ту же мощность при тех же оборотах при напряжении 220 В при соединении обмоток статора треугольником.
Внутри статора помещается вращающаяся часть электродвигателя - ротор.
Ротор асинхронного двигателя также набирают из стальных штампованных листов в форме дисков. Насаженные на вал они образуют ротор имеющий форму цилиндра. По окружности диска выштамповывают отверстия, образующие при сборке ротора пазы в которые закладывают обмотку ротора.
По конструктивному исполнению обмотки ротора асинхронные двигатели подразделяют на двигатели с короткозамкнутым ротором и двигатели с фазным ротором.
Короткозамкнутая обмотка ротора образуется медными или латунными неизолированными стержнями, помещенными в пазы ротора. По торцам стержни соединяют медными короткозамыкающими кольцами. Такая короткозамкнутая обмотка отдельно от ротора имеет вид клетки, называемой «беличьим колесом».
Обмотку фазного ротора выполняют из изолированных проводников. В пазы ротора укладывают три фазные обмотки сдвинутые в пространстве на 1200. Обмотка ротора получается такой же как и обмотка статора.
Фазные обмотки ротора соединяют звездой, при этом их начала соединяют с контактными кольцами, насаженными на вал и изолированными как от вала, таки друг от друга. Контактные кольца вращаются вместе с валом. По ним скользят неподвижные графитовые щетки. Такое устройство позволяет обмотки замкнуть накоротко или подключить к обмоткам ротора пусковые трехфазные реостаты, которые позволяют снизитьвеличину пускового тока.
На схемах асинхронные двигатели изображают такими стандартными обозначениями:

с короткозамкнутым ротором |
с фазным ротором |
|
|
|
|
ПРИНЦИП ДЕЙСТВИЯ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
При включении двигателя в сеть трехфазного переменного тока в статоре образуется вращающееся магнитное поле, силовые линии которого пересекают стержни или обмотки ротора. При этом согласно закону электромагнитной индукции в обмотке ротора индуктируется э.д.с., пропорциональная скорости пересечения силовых линий.
Под действием индуктированной э.д.с. в короткозамкнутом роторе возникают значительные токи.
В результате взаимодействия тока ротора с вращающимся магнитным полем возникает сила, действующая на проводники ротора (закон Ампера), направление которой определяется по правилу левой руки (если ладонь левой руки расположить так, чтобы в нее входил вектор магнитной индукции, а четыре вытянутых пальца расположить по направлению тока в проводнике, то отогнутый большой палец покажет направление силы, действующей на ток).
Эта сила создает момент силы, вызывающий вращение ротора в направлении вращения магнитного поля статора. Этот момент силы также называется вращающим моментом.
Частота вращения ротора всегда меньше частоты вращения магнитного поля статора. По этой причине эти электродвигатели называются асинхронными.
Ротор не может вращаться синхронно с магнитным полем, так как при совпадении частот не будет относительного движения магнитного поля и ротора, вследствие чего ротор не будет пересекаться полем, в нем не будет наводится ток и, следовательно исчезнет вращающий момент.
Разность частот вращения поля статора и ротора отнесенная к частоте вращения магнитного поля статора называется скольжением. Скольжение показывает на сколько частота вращения ротора отстает от вращающегося магнитного поля.
s = 100% (n1 - n2)/n1
где n1- частота вращения магнитного поля; n2 - частота вращения ротора. В начальный момент включения электродвигателя частота вращения ротора n2 = 0 и s = 1.
У выпускаемых промышленностью электродвигателей при полной нагрузке скольжение колеблется от
2% до 12%.
ВРАЩАЮЩИЙ МОМЕНТ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ.
Для определения пригодности электродвигателя для работы в качестве привода различных механизмов необходимо знать вращающий момент этого двигателя и характер его изменения.
Вращающий момент электродвигателя возникает в результате взаимодействия токов протекающих по обмотке ротора с вращающимся магнитным полем статора.
Вращающий момент асинхронного электродвигателя определяется следующей формулой:
M = k Ф Iрот cos рот
где M - вращающий момент (Н м); Ф - вращающийся магнитный поток (Вб); Iрот - ток в обмотке ротора; k - константа, зависящая от конструкции электродвигателя; cos рот - косинус угла сдвига фаз между током и э.д.с. в обмотке ротора.
Таким образом, вращающий момент асинхронного двигателя пропорционален величине вращающегося магнитного потока, пронизывающего ротор, и активной составляющей тока ротора. Магнитный поток двигателя величиной постоянной для данного двигателя. Переменной величиной
является ток ротора, зависящий в свою очередь от скольжения. Вращающий момент асинхронного двигателя приближенно может быть выражен формулой:
M = 2Mкр/(s/sкр + sкр/s),
где s - скольжение электродвигателя; Mкр -максимальный момент электродвигателя, называемый критическим; sкр - критическое скольжение электродвигателя, соответствующее критическому моменту. Эта формула следует из анализа схемы замещения асинхронного электродвигателя.
Критическое скольжение можно определить по приближенной формуле:
sкр = Rрот/(xст + xрот),
где Rрот - активное сопротивление обмотки ротора; xст и xрот - реактивные сопротивления обмоток статора и ротора.
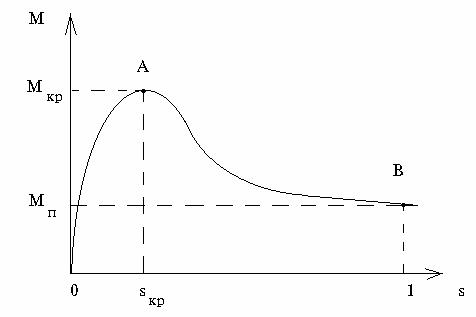
Зависимость вращающего момента от скольжения имеет вид:
Кривую можно условно разделить на два участка: ОА и АВ. Участок ОА соответствует устойчивым режимам работы асинхронного двигателя: с увеличением момента нагрузки скорость вращения двигателя замедляется, скольжение увеличивается, и как видно из графика, возростает вращающий момент.
Новое положение равновесия достигается. когда вращающий момент становится равным тормозному. При этом двигатель устойчиво вращается с уменьшенной скоростью.
Участок АВ соответствует неустойчивым режимам работы двигателя.
С увеличением момента нагрузки скольжение увеличивается, вращающий момент уменьшается, скольжение возростает еще больше.
Двигатель останавливается и начинает быстро нагреваться, так как при s = 1 его пусковой ток в 6 - 7 раз превышает номинальное значение.
Максимальный момент двигателя (Мкр) называется опрокидывающим. Двигатель может работать только на устойчивой части характеристики.
Для практических целей вращающий момент электродвигателя определяют исходя из его мощности и скорости вращения.
Для этого служит следующее соотношение:
M = 9550 P/n (Н м)
где P - мощность двигателя в кВт; n - скорость вращения в об/мин.
МЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКА АСИНХРОННОГО ДВИГАТЕЛЯ
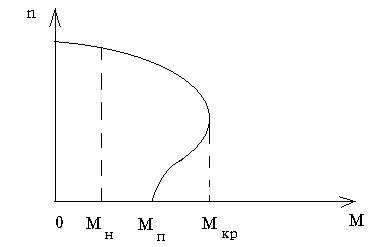
Зависимость скорости вращения двигателя от момента на валу при постоянных напряжении питания и частоте сети называют механической характеристикой.
Механическая характеристика асинхронного двигателя имеет вид:
Механическая характеристика снимается экспериментально или На этом графике можно отметить максимальный критический момент; пусковой момент (при пуске
двигателя, то есть при n2 = 0); номинальный момент, соответствующий номинальному режиму. Номинальные технические параметры расчитываются из условия допустимой температуры нагрева двигателя и электрической прочности, ограничиваемых стойкостью изоляции проводников обмоток. строится на основании графика M(s).
С увеличением момента нагрузки скорость вращения двигателя уменьшается незначительно. Если момент нагрузки превысит максимальный, то скорость вращения двигателя лавинообразно уменьшиться до нуля.
Скорость вращения асинхронного двигателя зависит от напряжения питания. Вращающий момент пропорционален квадрату напряжения питания. Поэтому даже небольшие колебания напряжения питания приводят к заметному изменению вращающего момента и скорости вращения двигателя.
При увеличении вращательного момента от нуля до максимального значения скорость двигателя уменьшается незначительно.
Такая механическая характеристика называется жесткой.
При перегрузке свыше мсаксимального момента двигатель работает в области неустойчивого режима и может остановиться, если тормозящий момент превышает вращающий момент создаваемый двигателем.
Механическая характеристика, относящаяся к нормальным рабочим условиям работы двигателя, называется естественной механической характеристикой.

ЛЕКЦИЯ № 8
ПУСК АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ.
Двигатель с короткозамкнутым ротором. Для двигателей с короткозамкнутым ротором обычно применяют прямое включение в сеть обмотки статора с помощью соответствующей коммутационной аппаратуры. Кратковременный толчок пускового тока (Iп = 4 7 Iн ) безопасен для двигателя, но может явиться причиной чрезмерно большого падения напряжения в сети при недостаточной мощности источника энергии (обычно трансформатора). В этих случаях ограничивают пусковой ток пуском двигателя при пониженном напряжении.
Напряжение в период пуска двигателя понижают:
1).используя в период пуска соединение обмотки статора звездой с последующим переключением ее на треугольник; 2).включая в цепь обмотки статора на период пуски добавочные активные или реактивные
сопротивления {реакторы); 3).подключая двигатель к сети через понижающий автотрансформатор.
Общий недостаток всех способов - значительное уменьшение пускового и максимального моментов двигателя, пропорциональных квадрату приложенного напряжения.
В тех случаях, когда требуются большие значения пускового момента. Применяется ротор с двойной клеткой, причем разных клеток могут чередоваться. Короткозамыкающие кольца в случае литых двойных клеток выполняются общими для обеих клеток. В ряде случаев обмотка двухклеточного двигателя выполняется из латуни или специальной бронзы, благодаря чему обеспечивается относительно большее ее активное сопротивление. Эта обмотка выполняет функции пусковой в асинхронном двигателе. Другая обмотка ротора - внутренняя - изготавливается изготавливается из меди с минимальным активным сопротивлением. Она выполняет функции основной рабочей обмотки двигателя. Обе обмотки могут иметь круглые пазы, однако внутренняя обмотка в ряде случаев выполняется прямоугольной или овальной формы. Короткозамыкающие торцевые кольца для обеих обмоток обычно изготавливаются из меди.
Двигатель с фазным ротором. Хорошими пусковыми характеристиками обладает двигатель с фазным ротором. Для снижения пускового тока обмотки ротора при пуске замыкают на активное сопротивление пускового реостата.
При этом уменьшается ток ротора, а следовательно, и ток статора. В то же время активная составляющая тока ротора возрастает, увеличивая пусковой момент. В пусковом реостате обычно имеется несколько ступеней, которые последовательно выводятся во время пуска вплоть до замыкания
обмотки ротора накоротко. Длительная работа с добавочным сопротивлением в цепи ротора неэкономична.
РЕГУЛИРОВАНИЕ СКОРОСТИ ВРАЩЕНИЯ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ.
Регулирование скорости вращения асинхронных двигателей производят несколькими способами. Скорость вращения асинхронного двигателя расчитывается по формуле:
n = 60 f(1 - s)/p (об/мин)
s - скольжение в долях единицы.
Из этой формулы видно, что скорость можно регулировать изменением:
-частоты переменного тока;
-числа пар полюсов;
-скольжения.
Регулирование скорости изменением величины скольжения асинхронного электродвигателя ввозможно двумя способами:
1). введением в цепь ротора дополнительного сопротивления, что возможно для двигателя с фазным ротором.
2). изменением реактивных сопротивлений, включаемых в обмотку статора.
Регулирование скорости вращения двигателя с фазным ротором введением в его цепь дополнительного сопротивления позволяет уменьшить его скорость не более, чем на 40 - 50% номинальной скорости. При таком регулировании с увеличением сопротивления реостата увеличивается величина скольжения, то есть уменьшается скорость вращения двигателя.
В этом случае схема регулирования сходна со схемой пуска асинхронного двигателя с фазным ротором
стой разницей, что регулировочный реостат должен быть расчитан на длительную нагрузку током. Регулирование скорости вращения с помощью добавочного сопротивления в цепи ротора приводит к неустойчивой работе электродвигателя на малых оборотах, так как при этом приходится включать большие сопротивления, что приводит к значительным колебаниям скорости при небольших изменениях момента сопротивления нагрузки.
Этот способ неэкономичен, так как увеличивает потери в роторной цепи.
Такой способ регулирования скорости вращения асинхронных электродвигателей применяют в тех случаях, когда работа двигателя с пониженной скоростью непродолжительна и когда не требуется большой точности регулировки (например подьемно-транспротные механизмы).
Регулирование скорости двигателе при помощи дросселей состоит в том, что в цепь статора электродвигателя включают реактивные сопротивления с переменной индуктивностью.
Изменение индуктивности реактивных сопротивлений (дросселей) осуществляется пропусканием постоянного тока различной величины через обмотку управления дросселями.
Изменяемое индуктивное сопротивление в цепи статора позволяет получить на зажимах электродвигателя различное напряжение, чем достигается изменение скольжения, то есть скорости вращения ротора.
Достоинством этого способа является плавное регулирования скорости вращения электродвигателя.
К недостаткам относится следующее: значительное уменьшение максимального вращающего момента, а так же уменьшение коэффициента мощности.
Регулирование скорости вращения за счет изменения числа пар полюсов осуществляется переключением обмоток статора и является ступенчатым.
Для этих целей применяют специально выпускаемые многоскоростные двигатели ( на 2, 3 и 4 скорости).

Двухскоростные двигатели имеют 6, трехскоростные - 9 и четырехскоростные - 12 выводов к переключателю полюсов.
Регулирование скорости вращения двигателей изменением частоты тока требует применения специального источника переменного тока с изменяемой частотой. Такие источники питания представляют собой тиристорные преобразователи частоты с регулируемой частотой.
При эксплуатации двигателей нередко возникает необходимость их торможения. Торможение двигателя может быть механическим и электрическим.
При механическом торможении электромагнит или пружины воздействуют через тормозные колодки на шкив, закрепленный на валу двигателя.
При электрическом торможении используют режим противовключения, когда у работающего двигателя переключением двух фаз (реверсирование) меняется направление вращения поля или режим динамического торможения, когда после отключения двигателя от сети в обмотку статора кратковременно подается постоянный ток.
СПЕЦИАЛЬНЫЕ ТИПЫ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
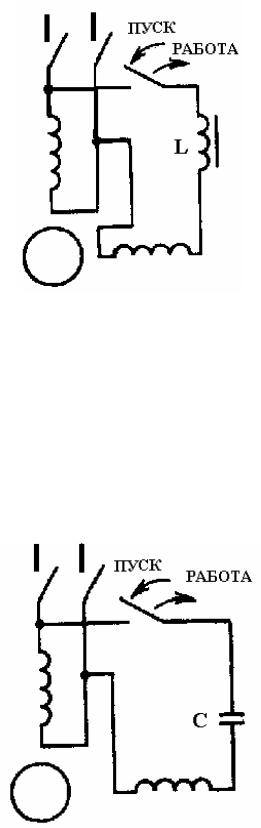
Однофазные асинхронные электродвигатели. Особенностью однофазного двигателя является отсутствие начального, или пускового, момента, то есть при включении такого двигателя в сеть ротор его будет оставаться неподвижным. Если же под действием какой-либо внешней силы вывести ротор из состояния покоя, то двигатель будет развивать вращающий момент. Отсутствие. начального вращающего момента является существенным недостатком однофазных асинхронных двигателей, поэтому их всегда снабжают пусковыми устройствами.
В однофазных асинхронных двигателях мощностью до 1-2 кВт имеется две обмотки рабочая и пусковая, сдвинутые на 900. Обе обмотки питаются от сети однофазного тока. Для создания вращающегося магнитного поля через пусковую обмотку должен проходить ток со сдвигом по фазе на 90° по отношению к току рабочей обмотки. Это достигается включением в цепь пусковой обмотки фазосдвигающего элемента: активного сопротивления или емкости.
После запуска двигателя пусковая обмотка отключается. Движение поддерживается пульсирующим полем рабочей обмотки.
В качестве однофазного асинхронного двигателя может быть использован трехфазный двигатель с отсоединенной одной из фаз статора. Мощность, развиваемая таким электродвигателем при однофазном включении состовляет 50 - 60 % номинальной мощности двигателя при трехфазной схеме включения.
Конденсаторные двигатели. В конденсаторном двигателе во время работы включены обе обмотки. Необходимый сдвиг по фазе между токами создается включением последовательно одной из них рабочей емкости Сраб, причем при пуске желательно иметь несколько большую емкость, что достигается включением Сп. После разгона и снижения тока пусковую емкость отключают, что позволяет улучшить условия работы двигателя в номинальном режиме. Мощности конденсаторных двигателей невелики (до 1,5 кВт).
Асинхронные двигатели небольшой мощности (до 600 Вт) применяют в автоматических устройствах и электробытовых приборах. Обычно используют однофазные микродвигатели. Для этих двигателей характерны повышенное (по сравнению с обычными двигателями) сопротивление обмотки ротора и соответственно работа с повышенным скольжением.
В устройствах автоматики используют асинхронные исполнительные двигатели и асинхронные тахогенераторы.
Исполнительные двигатели. Исполнительные двигатели служат для преобразования электрического сигнала в механическое перемещение вала. Частота вращения таких двигателей должна плавно изменяться под воздействием сигнала управления. Исполнительные двигатели не допускают самохода (при снятии сигнала управления ротор останавливается), имеют линейные механические и регулировочные характеристики, высокое быстродействие, бесшумны.
Асинхронные тахогенераторы. Асинхронные тахогенераторы преобразуют механическое вращение в электрический сигнал. Их применяют для измерения частоты вращения, выработки ускоряющих и замедляющих сигналов, выполнения операций дифференцирования и интегрирования в схемах счетнорешающих устройств.
Линейные асинхронные двигатели. Линейные асинхронные двигатели применяют в тех случаях, когда требуется линейное перемещение подвижной части исполнительного устройства. Их принцип действия основан на способности многофазной системы токов создавать «бегущее» магнитное поле. Такое поле создается токами трехфазной обмотки, уложенной в прямолинейный статор. Параллельно статору располагают подвижную часть двигателя - магнитопровод, в пазы которого заложены алюминиевые или медные стержни короткозамкнутой обмотки. Взаимодействие бегущего магнитного поля с токами, наводимыми в этой обмотке, создает электромагнитные силы, увлекающие подвижную часть двигателя за собой.
Подвижной частью такого двигателя может быть электропроводящая жидкость (жидкие металлы, электролиты), которая заполняет канал между двумя статорами с трехфазной обмоткой. Такие устройства называются магнитогидродинамическими насосами.
Использование линейных двигателей позволяет исключить в механических устройствах кинематические звенья для преобразования вршцагельного движении в поступательное.
СИНХРОННЫЕ МАШИНЫ
Синхронные машины, используют в качестве генераторов и двигателей. Все генераторы переменного тока - это синхронные машины. Синхронные двигатели применяют реже асинхронных и только в тех случаях, когда при заданной мощности и режиме работы они оказываются экономичнее, чем асинхронные., Синхронные машины, так же как и асинхронные, состоят из статора и ротора.. В пазах статора
подобно тому, как это сделано у асинхронного двигателя, уложена трехфазная силовая обмотка. На роторе размещена обмотка возбуждения . Она соединена через кольца и щетки с источником постоянного тока. Мощность, необходимая для возбуждения, составляет 0,3 - 3 % от номинальной мощности синхронной машины.
Постоянный магнитный поток, создаваемый током ротора, замыкается через сталь ротора, воздушные зазоры и сердечник статора. Если ротор вращается, то создается вращающееся магнитное поле. Пересекая проводники фазных обмоток статора, это поле наводит в них переменную э.д.с...
Частота вращения ротора поддерживается постоянной, поэтому изменение э.д.с. во времени определяется только распределением магнитной индукции вдоль окружности ротора. Это распределение носит синусоидальный характер, поэтому и в фазных обмотках статора индуцируются синусоидальные э.д.с., сдвинутые по фазе одна относительно другой на одну треть периода (1200 ). Если на роторе р пар полюсов, то за один его оборот p раз изменяется э.д.с. и частота этого изменения:
f = pn/60.
Для получения частоты 50 Гц двухполюсный генератор (р=1) должен делать 3000об/мин.
При подключении обмотки статора к трехфазной нагрузке проходящий по ней ток создает вращающее магнитное поле с частотой вращения, равной частоте вращения ротора.
Суммарное магнитное поле вращается с той же частотой, с какой вращается ротор. Поэтому машина называется синхронной.
Обмотка возбуждения генератора через кольца и щетки получает питание либо от генератора постоянного тока (возбудителя), связанного с ротором синхронного генератора, либо от выпрямителей,
подключаемых к сети. Для мощных синхронных генераторов применяют так называемую бесщеточную систему возбуждения. В этой системе в качестве возбудителя используют специальный синхронный генератор, у которого обмотка якоря расположена на роторе машины, а выпрямитель укреплен непосредственно на валу. При этом в цепи обмотки генератора отсутствуют скользящие контакты, что повышает надежность системы.
Устройство синхронных двигателей аналогично устройству трехфазного синхронного генератора. Трехфазную статорную обмотку подключают к сети трехфазного переменного тока, а в обмотку возбуждения подают постоянный ток.
Частота вращения ротора синхронного двигателя равна частоте вращения магнитного поля, то есть не зависит от нагрузки, то есть двигатель имеет абсолютно жесткую механическую характеристику.
Для разгона синхронного двигателя применяют асинхронный пуск. Для этого на роторе имеется специальная короткозамкнутая пусковая обмотка: медные или латунные стержни, заложенные в полюсные наконечники и замкнутые накоротко торцевыми кольцами. После разгона ротора до частоты вращения, близкой к синхронной, в обмотку возбуждения подается постоянный ток и ротор начинает вращаться с синхронной частотой.
Достоинством синхронных двигателей помимо абсолютно жесткой механической характеристики является их способность работать с cos = 1 и даже с опережающим током, то есть генерировать реактивную мощность. Для этого увеличивают возбуждение двигателей.
Применение синхронных двигателей позволяет повысить cos в системе и тем самым снизить потери при передаче электроэнергии.
Для повышения cos в системе применяют также синхронные компенсаторы - перевозбужденные синхронные двигатели облегченной конструкции, работающие вхолостую.
Основным недостатком синхронных двигателей является потребление от источника как переменного. Так и постоянного тока.
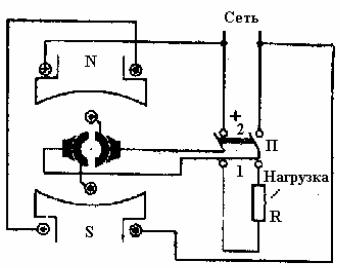
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПОСТОЯННОГО ТОКА
Схема машины постоянного тока, показанная ниже на рисунке, поясняет принцип работы генератора и двигателя постоянного тока.
На схеме показан один виток обмотки якоря и простейший коллектор в виде двух изолированных полуколец. При положении переключателя П в позиции 1 и вращении якоря в последнем наводится э.д.с., направление которой определяется по правилу правой руки. В цепи нагрузки R будет протекать ток, совпадающий по направлению с э.д.с.. При такой схеме машина работает в режиме генератора. При положении переключателя П в позиции 2 (первичный двигатель отключен) в якоре будет протекать ток, направление которого противоположно ранее рассмотренному. Взаимодействие тока