


Если пренебречь потерями в преобразователе, то мощность якорной цепи двигателя
Pя =Uя I = 389,84 14,5 = 5652,68 Вт.
Отсюда коэффициент мощности имеет следующее значение:
Кр = Pя/P = 5652,68/7250 = 0,779.
2. Режим инвертирования (рекуперативного торможения). В момент изменения полярности ЭДС:
/Eя/ = 382,56 В.
Из уравнения для якорной цепи находим
Uя = Eя + Iя Rя = -382,56 + 14,5 0,5 = -375,31 В.
Используя (5.12), находим угол управления:
|
πU я |
|
|
π (−375,31) |
=146,48 |
o |
. |
α = arccos |
|
|
= arccos |
|
|
||
|
2 2U |
|
2 2 500 |
|
|
|
|
Мощность, преобразуемая двигателем:
Pм = Eя Iя.= 382,56 14,5 = 5547,12 Вт.
Потери мощности в сопротивлениях якоря:
Pя = (Iя)2 Rя = (14,5)20,5 = 105,125 Вт.
Мощность, поступающая в сеть, равна разности этих значений:
Pс = Pм - Pя = 5547,12 – 105,125 = 5442 Вт.
При рекуперации энергии в сеть, если к двигателю не подводится механическая энергия с вала, то его скорость и ЭДС снижаются по мере превращения кинетической энергии в электрическую и возвращения последней в сеть. Для того, чтобы ток якоря оставался постоянным на протяжении всего процесса торможения, необходимо постоянно менять угол управления. Такое управление возможно в замкнутых электромеханических системах, в которых вводится обратная связь по току.
Трехфазный управляемый преобразователь
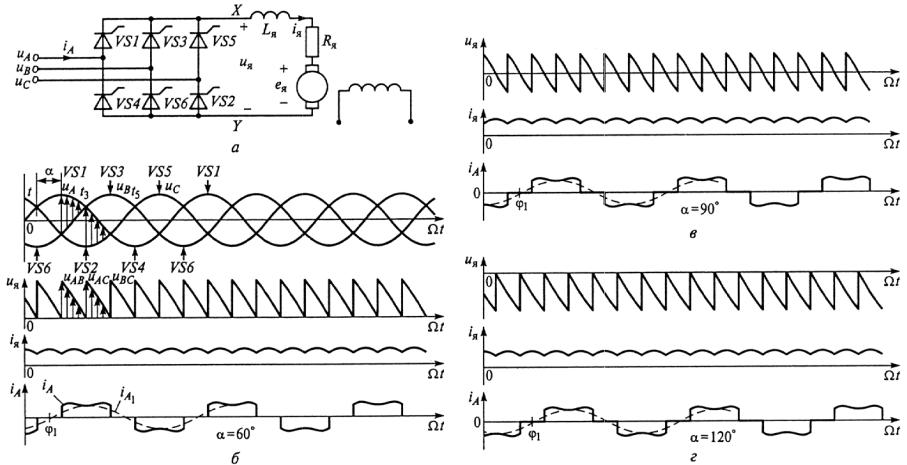
Для электромеханических систем средней и большой мощности применяют трехфазные мостовые полу- и полностью управляемые схемы. На рис. 2.2.1.12 представлены схемы СЧ и диаграммы полностью управляемого преобразователя. Моменты включения тиристоров соответствуют углу управления α = 60°, тиристоры включаются через 60°, а частота напряжения якоря в 6 раз больше частоты сети. При большой частоте в полностью управляемых преобразователях создаются более благоприятные условия для поддержания непрерывного тока якоря, чем в полууправляемом преобразователе [4].
Рассмотрим работу схемы. В момент Ωt = π/6 + α открывается VS1. К этому времени VS6 уже открыт, поэтому на интервале π/6 + α < Ωt < π/6 + α + π/3 ток проходит через тиристоры VS1 и VS6, подключая к якорю напряжение фаз А и В, равное Uя = UAB. В момент Ωt = π/6 + α + π/3 включается VS2, закрывая VS6 обратным напряжением (процесс естественной коммутации). Ток вместо VS6 проходит через VS2, поэтому выводы якоря соединены
25
с фазой А через VS1 и фазой С через VS2, что соответствует Uя = UAC. Процесс повторяется через Ωt = 60°, когда открывается следующий тиристор. Принятая нумерация тиристоров соответствует очередности их включения.
Напряжение на двигателе в инверторном режиме работы преобразователя может быть отрицательным, как показано на рис. 2.2.1.12,г для угла управления α = 120°. Если напряжение двигателя изменить с помощью реверсора в якорной цепи или поменять направление потока, энергия от двигателя будет передаваться в сеть, обеспечивая рекуперативное торможение. Скорость двигателя при этом будет падать, а ЭДС — уменьшаться. Для поддержания тока и обеспечения процесса рекуперации в этом режиме необходимо регулировать угол α. Для полностью управляемого преобразователя среднее напряжение на двигателе определяется выражением:
U я (α)= |
3 |
π 6+α+π 3 |
(U A −U B )d(Ωt)= |
3 6U |
cos(α), (2.2.1.15) |
|
∫ |
π |
|||
π |
|||||
|
|
π 6+α |
|
|
|
где UA и UB — фазные напряжения.
Решая (2.2.1.7) и (2.2.1.15), получим уравнение механической характеристики:
ω = |
3 6U |
cos(α)− |
Rя |
|
M . |
(2.2.1.16) |
πcΦ |
Φ |
2 |
||||
|
|
|
(с |
) |
|
|
Первый член в правой части (2.2.1.16) представляет собой скорость идеального холостого хода (М = 0).
Для полууправляемого преобразователя среднее значение напряжения определяется выражением:
U я (α)= 3 2π6U (1+ cos(α)).
Зависимости Uя от α при непрерывном токе для двух видов преобразователей показаны на рис. 2.2.1.13. Эти же кривые представляют зависимость скорости холостого хода от угла управления. Второй член в правой части (2.2.1.16) соответствует изменению скорости с увеличением момента. Чем меньше сопротивление якорной цепи, тем это изменение меньше, т. е. выше жесткость характеристик и больше диапазон регулирования скорости. В двигателях большой мощности ток реального холостого хода имеет заметное значение и при использовании трехфазных преобразователей может быть непрерывным. Поэтому трехфазные преобразователи обеспечивают
больший диапазон регулирования и лучшие энергетические показатели, чем однофазные.
Вследствие односторонней проводимости преобразователя ток якоря не может изменить своего направления – характеристики располагаются только в квадрантах I и IV. Для работы электропривода во всех четырех квадрантах можно применить 2 способа
26
Первый способ – применение второго управляемого выпрямителя (рис. 2.2.1.14). В этом случае образуется схема реверсивного управляемого выпрямителя, состоящая из двух нереверсивных выпрямителей. В реверсивных управляемых выпрямителях используют различные принципы управления комплектами тиристоров. Например, при раздельном управлении управляющие импульсы подаются только на один из тиристорных комплектов, который должен в данный момент проводить ток. На второй комплект импульсы не подаются, и он не работает — «закрыт».
Второй способ – применение нереверсивного преобразователя в якорной цепи за счет изменения направления тока возбуждения электродвигателя. В этом случае для питания обмотки возбуждения используется реверсивный ТП. Преимущества этого способа — существенно меньшие габариты, мощность и стоимость преобразователя для питания обмотки возбуждения по сравнению со случаем наличия реверсивного преобразователя в якорной цепи ДПТ. Основной недостаток — ток возбуждения при реверсе изменяется значительно медленнее по сравнению с током якоря. Это существенно затягивает переход ДПТ из одного режима в другой. Поэтому этот способ
нельзя использовать в электроприводе механизмов, где необходимо высокое быстродействие.
Для уменьшения зоны работы преобразователя в режиме прерывистого тока в цепь выпрямленного тока вводят дроссель. Расчет необходимой при этом индуктивности дросселя производят следующим образом. Вначале определяют необходимую суммарную эквивалентную индуктивность цепи якоря Lэ, которую для симметричной мостовой схемы можно найти из выражения, мГн:
|
103 |
|
0,22U |
2 |
sin(α1 )− 2xa |
|
|
|
Lэ ≥ |
|
|
|
|
|
, |
||
|
|
|
|
|||||
|
|
ω |
|
Id min |
|
|
|
|
|
|
|
|
|
|
|
||
где U2 — действующее значение вторичного фазового напряжения трансформатора; Id min — минимальный ток нагрузки; α1 — максимальный угол регулирования в рабочем диапазоне изменения напряжения; ха — индуктивное сопротивление обмоток фазы трансформатора.
Часто пользуются упрощенной формулой для определения индуктивности, мГн:
U |
d ном |
|
|
Lэ ≥ 0,3 |
|
. |
|
|
|
||
|
|
|
|
|
Id min |
||
Затем искомую индуктивность дросселя определяют из выражения
Lэ = Lдр + Lдв +Lа,
где Lдр, Lдв и Lа — индуктивность соответственно сглаживающего дросселя, якоря двигателя и фазы трансформатора.
Значение Lдв, мГн ориентировочно можно определить по формуле
27

LДВ = К |
Uном |
103 |
, |
|
Iном |
|
pωном |
||
|
|
|
||
где К — коэффициент (для компенсированных двигателей рекомендуется
K = 0,10...0,25, для некомпенсированных K = 0,5...0,6); Uном; Iном. ωном — но-
минальные значения напряжения, тока и угловой скорости двигателя; р — число пар полюсов.
Пример 2.2.1.2. Требуется рассчитать эквивалентную индуктивность и необходимую индуктивность дросселя, включаемого в цепь двигателя П91.
Технические данные двигателя: Р= 32 кВт, UHOM = 440 В; nном = 1050 мин-1;
Iном = 190 А; р = 2.
Минимальный ток Idmin = 0,18Iном = 16 А.
Примем значение La равным 0,3 мГн и UdHOM = UHOM. Индуктивность якоря двигателя
|
|
|
LДВ = 0,6 |
440 103 |
= 6,3 мГн, |
|
|
|
|
190 2 110 |
|||
|
2πnном |
|
2 3,14 1050 |
|
|
|
где ωном = |
= |
=110 рад/с. |
|
|||
60 |
60 |
|
||||
|
|
|
|
|
||
Требуемая индуктивность цепи якоря
LЭ = 0,3 44016 = 8,1мГн,
Тогда индуктивность сглаживающего дросселя
Lдр = 8,1 - 6,3 - 0,3 = 1,5 мГн.
Дроссель в цепи выпрямленного тока служит также и для уменьшения пульсаций тока. Пульсации тока очень вредно сказываются на работе
двигателя, так как повышают тепловые потери, ухудшают коммутацию, увеличивают износ щеток и подшипников. Дополнительное разрушение подшипников вызывается токами, наведенными пульсирующим напряжением через емкость между обмоткой якоря и валом двигателя.
Пример 2.2.1.3. Частота вращения двигателя постоянного тока с независимым возбуждением n = 1800 мин-1, мощность Р1 = 15 кВт, напряжение U = 300 В. Напряжение двигателя регулируется трехфазным преобразователем в цепи якоря. Ток возбуждения также регулируется трехфазным преобразователем; при этом установлено его максимальное значение. Источник переменного тока соединен в «звезду», напряжение на его выходе UЛ = 208 В, частота f = 50 Гц. Сопротивление обмотки якоря Rя = 0,25 Ом, а обмотки возбуждения RB = 245 Ом, постоянная напряжения Ки = 1,2 (В/А)рад/с. Предполагая, что в токах якоря и возбуждения отсутствуют пульсации и возможно пренебречь трением, требуется определить:
1) угол регулирования преобразователя в цепи якоря α при условии, что
28
29
Рис. 2.2.1.12. Регулирование скорости ДПТ НВ с помощью трехфазного полностью управляемого преобразователя: а — схема СЧ; б— г — диаграммы при различных углах управления в режиме непрерывного тока
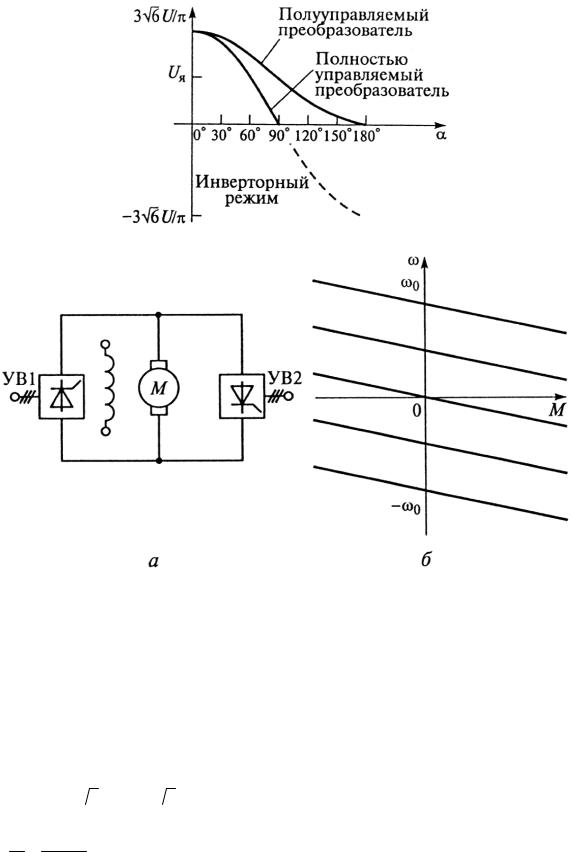
Рис. 2.2.1.13. Зависимости Uя от α в режиме непрерывного тока
Рис. 2.2.1.14. ЭП постоянного тока с реверсивным управляемым выпрямителем (а) и его характеристики (б)
двигатель имеет номинальную мощность и частоту вращения;
2)скорость XX при том же значении угла, что и в п. 1 и в предположении, что ток XX в якоре составляет 10 % номинального;
3)диапазон регулирования скорости. Решение.
1. ω = 1800 π/30 = 188,5 рад/с.
Фазное напряжение на преобразователе:
Uф = Uл/  3 = 208/
3 = 208/  3 = 120 В;
3 = 120 В;
Номинальный ток якоря:
I я = UP1 = 15300кВтВ = 50А.
Для максимального тока возбуждения α = 0. Из уравнения (5.15) находим напряжение
30