

Манко1 / нечетк логики
.pdfУДК 629.735.3
ОЦЕНКА ЭФФЕКТИВНОСТИ РАБОТЫ СИСТЕМЫ СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА САМОЛЕТА НА ОСНОВЕ НЕЧЕТКОЙ ЛОГИКИ Нгуен Нгок Туан
Национальный технический университет Украины «Киевский политехнический институт»
,В сегодняшнее время для безопасности полетов, кроме традиционных систем автоматического управления, в самолетостроении широко применяются интеллектуальные системы управления (ИСУ). В систему автоматического управления полетом самолета входят различные подсистемы управления режимов полета, в частности, подсистема управления высотой полета. Благоприятное влияние системы управления высотой на процесс управления полетом самолета проявляется в улучшении качества переходных процессов возвращения самолета к исходной высоте после непроизвольного отклонения под действием внешних возмущений, и также в улучшение качества переходных процессов вывода самолета на заданную высоту полета.
Целью данной работы является разработка и оценка эффективности применения системы автоматического управления высотой полета самолета на основе нечеткой логики.
Для выполнения проектирования и построения системы управления выбиран одну конкретную модель самолета. В данной работе была выбрана модель самолета типа БПЛА – ФАКС – 1. Модель пространственного движения самолета построена в среде MATLAB/Simulink с помощью Aerospace Blockset. Готовые блоки этого раздела позволяет уменьшить затраты времени на разработку полной нелинейной модели, описывающую движение самолета. Полученная модель близкая к реальному объекту. На процессе проектирования считается влияние реальной атмосферной среды на полет самолета. При этом возмущение ветра имеет большое влияние на движение самолета.
Вначале построим систему стабилизации и управления скоростью полета самолета. Потому, что аэродинамические силы и моменты зависят от скорости полета. Из изменения скорости полета приводится к изменению всех характеристик движения самолета. Поэтому скорость самолета должна
строго контролироваться, особенно при полете на режимах, близких к граничным. Существуют два основных способа управления скоростью: воздействием на руль высоты и на тягу двигателя. Во втором случае – изменение тяги, простой закон управления скоростью для имеет вид:
tv V0 |
|
K |
|
|
(1) |
V KvP |
|
vI |
|||
|
|
s |
|
|
|
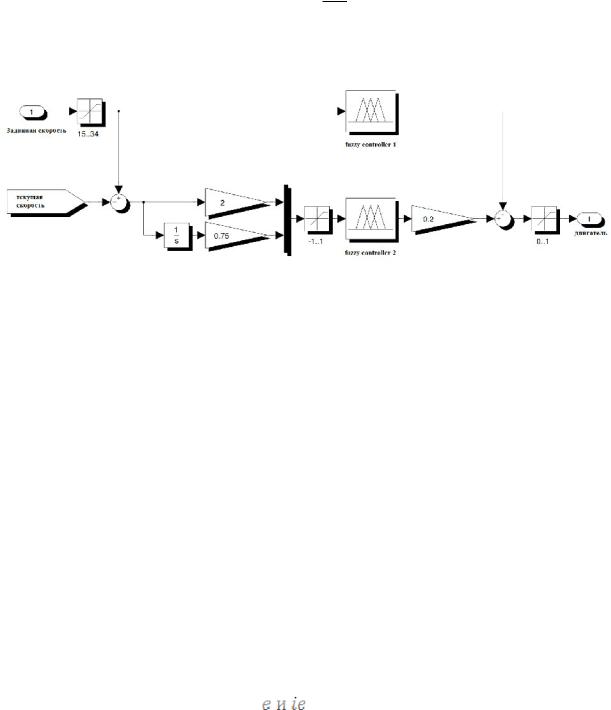
Соответственно этого закона, если проектируем регулятор на основе нечеткой логики, то схема имеет следующий вид:
Рис.1. Имитационная схема системы стабилизации и управления скоростью.
В схеме системы стабилизации и управления скоростью составляют два фаззи-регулятора. Первый регулятор принимает заданную скорость полета входным сигналом и построен по типу Сугено.
База правил первого нечеткого регулятора показана на таблице:
Таб.1
|
skorost (м/с) |
|
dvigatel (k) |
|
14,4 |
|
0,4 |
|
19 |
|
0,5 |
|
22,7 |
|
0,6 |
If |
25,9 |
then |
0,7 |
|
28,9 |
|
0,8 |
|
31,7 |
|
0,9 |
|
34,4 |
|
1 |
Второй регулятор построен по типу Мамдани. На нечеткий регулятор
поступают два входных сигнала |
. |
База правил нечеткого регулятора: |
Поверхность, показывающая базу |
|
правил нечеткого регулятора: |

|
e |
n |
z |
p |
ie |
|
|||
|
|
|
|
|
n |
|
nb |
nm |
z |
z |
|
nm |
z |
pm |
p |
|
z |
pm |
pb |
Исследуем способность работы системы стабилизации и управления скоростью в разных условиях и разных заданных скоростей. При этом начальная высота полета H0 200м, начальная скорость полета V0 25м/ с , самолет летает в горизонтальном полете. При присутствии возмущения ветра, заданная скорость изменяется от V1 19м/ с до V2 31м/ с через 5с, получим графику:
Рис.2. Изменение скорости полета самолета
Вывод: система стабилизации и управления скоростей обеспечивать выполнить задачу стабилизации и управления скоростей. Из графики заметим, что при действии ветра отклонение текущей скорости от заданной скоростью полета самолета не больше 0,2 м/с при устанавливающем.
Системы автоматического управления продольным траекторным движением на маршруте или система автоматического управления высотой самолета. Простейшая система автоматического управления высотой реализует следующий закон управления рулем высоты:
|
|
рвСАУВ K y y K KH (H H0 ) |
(2) |
где рвСАУВ - |
автоматическое отклонение руля высоты от балансировочного |
||
положения; |
|
- приращение опорного угла тангажа 0 ; |
H , H0 - |
соответствующее текущее и опорное (в момент включения режима) значения барометрической высоты. K y , K, KH -передаточные коэффициенты.
Для повышения качества управления система стабилизации и управления высотой не только принимает рассогласование между текущей и заданной высотой а еще скорость изменения высоты самолета как входной сигнал. В результате получаем закон управления:
рвСАУВ K y y K( 0 ) KH (H H0 ) KH ' |
dH |
(3) |
|
dt |
|
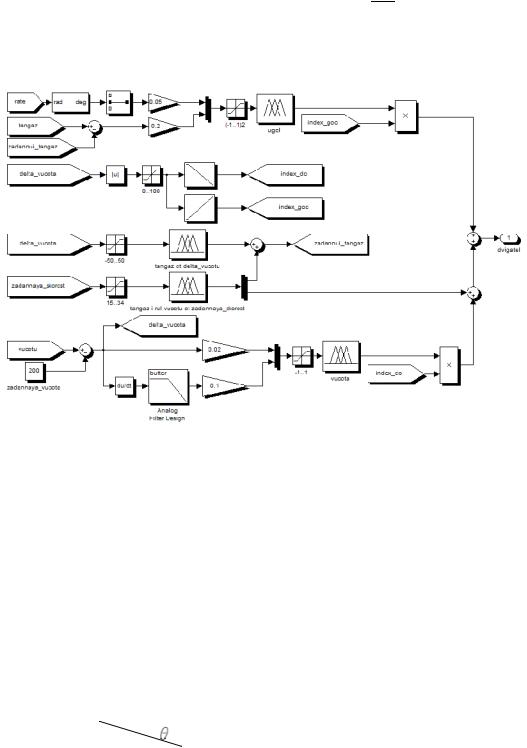
Имитационная схема системы стабилизации и управления высотой имеет следующий взгляд:
Рис.2. Имитационная схема системы стабилизации и управления высотой
Значение заданного тангажа зависит от заданной скорости полета и отклонения текущей высоты от заданной высотой. При устанавливающем движении отклонение руля высоты зависит от заданной скорости. Такие зависимость мы задаем с помощью фаззи-регуляторов типа Сугено: “tangaz ot delta_vucotu” и “tangaz i rul vucotu ot zadannaya_skorost”.
Первый фаззи – регулятор, управляющий угловым положением самолета, построен на базе правил:
Таб.2
|
n |
z |
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
nb |
|
nm |
z |
|
|
z |
|
nm |
|
z |
pm |
|
|
p |
|
z |
|
pm |
pb |
|
Второй фаззи – |
регулятора |
управляет |
положением самолета по |
||||
координате. При этом, первый входной сигнал – отклонение текущей от заданной высоты 










 , второй входной сигнал – скорость изменеия
, второй входной сигнал – скорость изменеия
отклонения высоты 
 , получаемый с помощью звено дифференциала и филтра высоких частот. База правил второго фаззи-регулятора показана ниже в таблице 3:
, получаемый с помощью звено дифференциала и филтра высоких частот. База правил второго фаззи-регулятора показана ниже в таблице 3:
Таб.3
|
nb |
nm |
z |
pm |
pb |
|
|
|
|
|
|
nb |
nb |
nb |
nm |
nm |
z |
nm |
nb |
nm |
nm |
z |
pm |
z |
nm |
nm |
z |
pm |
pm |
pm |
nm |
z |
pm |
pm |
pb |
pb |
z |
pm |
pm |
pb |
pb |
Исследуя процесс работы первого и второго фаззи-регулятора в разных условиях эксплуатации (в разных заданных высотах, при присутствии и отсутствии возмущения ветра) можно провести выводы функционирования каждого регулятора из них: первый фаззи-регулятор, который управляет угловым положением самолета, позволяет самолет достигается к заданной высоты. Но есть недостаток: динамическая и статическая ошибка переходного процесса очень большая. А второй фаззи-регулятор, который управляет по координате, дает лучше результат при небольшом отклонении текущей от заданной высоты. В случае отклонение текущей с заданной высоты больше ста метров, самолет колеблется и нельзя достигаться к заданной высоте. Для воспользоваться преимущества и убирать недостатки характеристик работы этих регуляторов, мы задаем коэффициенты использования этих регулятора, зависящие от H H H0 .
Исследуем способность работы системы в разных заданных высотах при присутствии возмущения ветра, получим результаты:
при заданной высоте Н=200м |
при заданной высоте Н=700м |
|
|
Вывод: система стабилизации и управления высотой полета самолета позволяет самолет достигается к заданной высоте. Отклонение текущей от заданной высоты не больше 20см, погрешность текущей от заданной скорости не больше 0,2 м/с.
Оценка эффективности применения системы автоматического управления высотой самолета на основе нечеткой логики при сравнении с традиционной системы управления. Традиционная система управления высотой построена по закону по формуле (3). Выбранные коэффициенты традиционного регулятора выполняют условие: качества управления традиционной системы не хуже чем качества системы управления на основе нечеткой логики. При этом качества управления системы показывается по показателям: время переходного процесса, значение перерегулирования, статическая погрешность при устанавливающем движении.
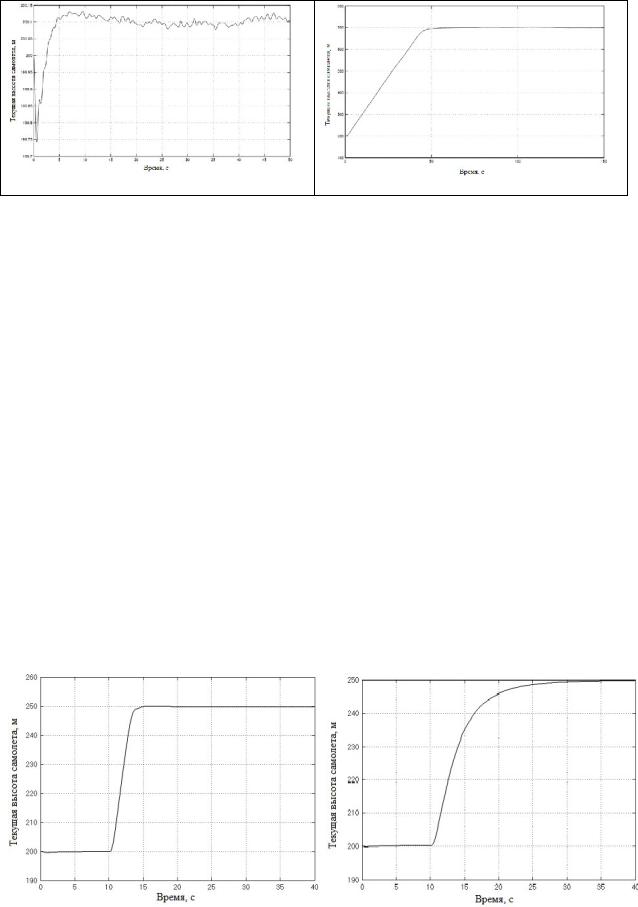
Исследуя обеих системы в условии присутствия возмущения ветра, высота полета изменяется от начального значение 200м на высоту 250м. Результаты показаны на графиках:
Традиционная система управления |
Система управления на основе |
|
нечеткой логики |
Рис.4. Изменение текущей высоты самолета от времени
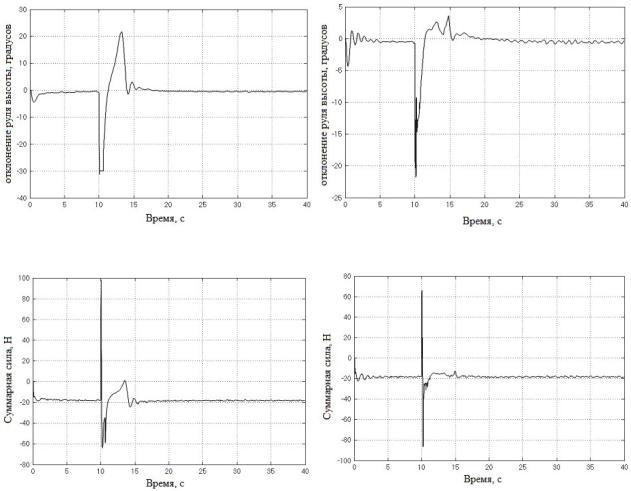
Рис.5. Отклонение руля высоты
Рис.6. Суммарная сила, действующая на поверхность руль высоты
Вывод: Из графики замечаем, что в обоих случаях самолет достигается к заданной высоте. В традиционной системе управления качества управления лучше чем системе управления на основе нечеткой логики. Но движение управляющего органа – отклонение руля высоты (30 градусов) традиционной системы управления больше чем системе на основе нечеткой логики (22 градусов). Максимальная сила, действующая на поверхность руля высоты, традиционной системы управления (98Н) больше чем системе на основе нечеткой логики (88Н). Из этого можно провести выводы, что система управления на основе нечеткой логики позволит выполнять задача удачно и плавно, уменьшение опасности при работе системы, повышение времени использования, уменьшение затраты топлива и повышение эффективности работы.
Список использованной литературы:
1.Воробьев В.Г., Кузнецов С.В. Автоматическое управление полетом самолетов. М.1995. 448 с.
2.Макаров И.М., Лохин В.М., Манько С.В., Романов М.П. –
Искусственный интеллект и интеллектуальные системы управления. -
М.: Наука, 2006. - 333 с.
Леоненков А.В. – Нечеткое моделирование в среде MATLAB и fuzzyTECH. – СПб.:БХВ-Петербург