

itmo347
.pdfТогда тепловым потерям в обмотке ротора будет соответствовать резистивный элемент R2′ , а механической нагрузке двигателя – резистивный эле-
мент R2′(1− s) / s и схема замещения примет вид рис. 10.11, б.
Внешне схема рис. 10.11, б идентична схеме замещения трансформатора, работающего на переменную активную нагрузку. При изменении скольжения, будет меняться режим работы двигателя. В
режиме идеального холостого хода
( s = 0 ) сопротивление нагрузки становится бесконечно большим и ток ротора уменьшается до нуля, что полностью соответствует принципу работы асинхронного двигателя, т.к. при синхронном вращении в роторе не индуцируется ЭДС и не возникает ток. При неподвижном роторе ( s =1) сопротивление нагрузки становится нулевым, создавая в цепи ротора ре-
жим короткого замыкания. Этот режим в асинхронном двигателе так же опасен как в трансформаторе, но он возникает при каждом
пуске и если ротор не приходит в движение, то двигатель может выйти из строя из-за перегрева.
Особенностью асинхронного двигателя по сравнению с трансформатором является наличие воздушного зазора. Поэтому при том же значении магнитного потока ток холостого хода двигателя существенно больше. Если в трансформаторе он не превышает 10% от номинального значения, то в двигателе может составлять до 50%. Кроме того, в номинальном режиме при скольжении ≈0,05 частота ЭДС ротора составляет ≈2,5 Гц. При такой частоте потерями в сердечнике ротора можно пренебречь и принять R0 = 0 .
Схема замещения рис. 10.11, б и соответствующие ей уравнения электрического состояния позволяют исследовать все процессы в двигателе, но при этом выражения для токов получаются сложными, что затрудняет их анализ. Поэтому её преобразуют, вынося ветвь намагничивания на вход (рис. 10.11, в). При этом параметры обмоток статора и ротора приобретают комплексный множитель
C1 = |
Z1 + Z 0 |
=1+ |
Z1 |
, |
|
|
|||
|
Z 0 |
Z 0 |
||
|
181 |
|
|
|
где Z1 = R1 + jX1; Z 0 = R0 + jX0 , а приведённый ток ротора становится рав-
ным I′′2 = I′2 / C1 .
Анализ коэффициента C1 показывает, что при обычных значениях пара-
метров двигателей |
его |
мнимая часть |
практически равна нулю и |
||
C1 ≈ C1 ≈1+ X1 / X0 . |
Но для машин мощностью выше нескольких киловатт |
||||
X1 / X0 < 0,05 , поэтому C1 <1,05 и этим коэффициентом при общем анализе |
|||||
можно пренебречь. Тогда по закону Ома для схемы рис. 10.11, в при C1 ≈1 |
|||||
величина приведённого тока ротора будет равна |
|
||||
|
I2′′ ≈ I2′ |
≈ |
U1 |
(10.19) |
|
|
(R1 + R2′ / s)2 |
+(X1 + X2′ )2 |
|||
|
|
|
|
||
Вопросы для самопроверки
1.Чем отличаются друг от друга коэффициенты трансформации ЭДС и тока?
2.В чём заключается отличие приведения параметров обмотки ротора асинхронного двигателя от приведения параметров вторичной обмотки трансформатора?
3.Укажите сходства и отличия схемы замещения асинхронного двигателя и трансформатора.
4.Укажите параметры схемы замещения, связанные с магнитными потоками двигателя.
5.Укажите параметры схемы замещения, связанные с преобразованием электрической энергии в двигателе.
10.6. Режимы работы асинхронного двигателя
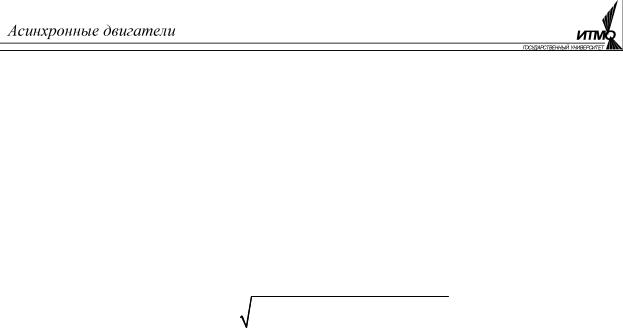
Для анализа режимов работы асинхронного двигателя построим векторную диаграмму, соответствующую схеме его замещения на рис. 10.11, б. Она строится аналогично векторной диаграмме трансформатора.
При изменении скольжения s изменяется активная составляющая комплексного сопротивления цепи ротора. Если входное напряжение при этом остаётся постоянным, то геометрическим местом точек конца вектора тока статора будет окружность диаметром U1 /( X1 + X2′) (рис. 10.12).
Точки холостого хода ( s = 0 ), короткого замыкания ( s =1) и бесконечно большого скольжения ( s = ±∞) делят круговую диаграмму тока статора на три сектора, соответствующие режимам двигателя, генератора и тормоза. Эти режимы отличаются направлениями потоков энергии преобразуемой в асинхронном двигателе.
В режиме двигателя скольжение находится в диапазоне 0 < s <1, а сдвиг фаз между напряжением и током обмотки статора ϕ1 < π/ 2 . Это означает, что
ротор вращается в направлении вращения магнитного поля со скоростью ниже синхронной и двигатель отдаёт механическую энергию нагрузке, т.к.
182
|
|
|
|
|
|
|
|
′ |
(1 |
− s) / s > 0 |
|
′2 |
′ |
(1 |
− s) / s > 0 . Фазовый сдвиг меньше 90° соответ- |
R2 |
P2 = I2 |
R2 |
ствует положительной мощности цепи статора P1 =U1I1 cosϕ1 > 0 . Таким образом, в режиме двигателя подводимая к статору электрическая энергия Wэ
преобразуется в механическую энергию Wм, отдаваемую на-
грузке, и в тепловую энергию Wт =Wэ −Wм , рассеиваемую в сердечнике, обмотках и в опорах ротора.
При |
скольжениях |
s < 0 n > n1 |
ротор двигателя |
вращается со скоростью выше синхронной. Из векторной диаграммы рис. 10.12 видно, что после компенсации потерь в сердечнике вектор тока перемещается по круговой диаграмме в IV-й квадрант и мощность цепи статора P1 =U1I1 cosϕ1 становит-
ся отрицательной, т.к. ϕ1 > π/ 2 .
Отрицательной становится также мощность, преобразуемая Рис. 10.12 переменным резистивным элементом схемы замещения
P2 = I2′2R2′(1− s) / s < 0. Это означает изменение направления потока механиче-
ской энергии, т.е. механическая нагрузка отдаёт энергию двигателю. В результате направление преобразования энергии машиной меняется на противоположное, т.е. механическая энергия Wм преобразуется в электрическую
Wэ и в тепловую Wт =Wм −Wэ . Двигатель при этом работает в генераторном
режиме. В генераторный режим асинхронный двигатель может перейти либо за счёт вращающего момента нагрузки, разгоняющего ротор до скорости выше синхронной, либо при уменьшении частоты источника питания статора, т.е. при уменьшении синхронной скорости. Второй вариант перехода в генераторный режим является обычным для асинхронных приводов с частотным управлением.
В случае вращения ротора в направлении противоположном направлению вращения магнитного поля n < 0 s >1. Механическая мощность при
′2 |
′ |
(1 |
− s) / s < 0, а электрическая – |
положительна |
этом отрицательна P2 = I2 |
R2 |
|||
P1 =U1I1 cosϕ1 > 0 , т.к. ϕ1 < π/ 2 |
(рис. 10.12). Следовательно, |
двигатель по- |
||
|
|
|
183 |
|
требляет электрическую энергию Wэ от источника питания и механическую энергию Wм от нагрузки на валу, и оба вида энергии рассеваются в виде тепла Wт =Wм +Wэ в его обмотках. Этот режим называется режимом электро-
магнитного тормоза или противовключения и является самым тяжёлым. Двигатель переходит в режим тормоза при нагрузке на валу превышающей его вращающий момент, но чаще его используют для быстрой остановки путём изменения направления вращения магнитного поля (реверсом).
Вопросы для самопроверки
1.Что представляет собой геометрическое место точек вектора тока статора?
2.Как определить направление потоков электрической и механической энергии, пользуясь схемой замещения и векторной диаграммой?
3.Укажите секторы круговой диаграммы, соответствующие двигательному, генераторному и тормозному режимам работы.
4.Укажите направления потоков электрической, механической и тепловой энергии, соответствующие двигательному, генераторному и тормозному режимам работы.
5.Почему режим противовключения является наиболее тяжёлым режимом для двигателя?
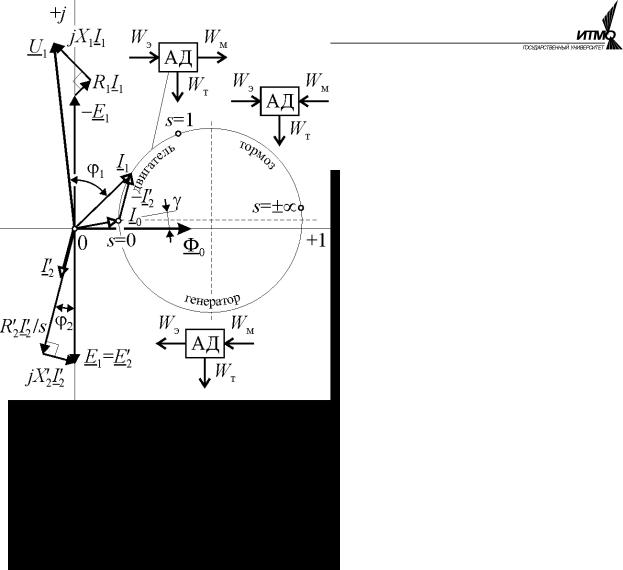
10.7.Энергетический баланс
|
Рассмотрим процесс преоб- |
|||||
|
разования энергии |
|
в режиме |
|||
|
двигателя, перемещаясь по схе- |
|||||
|
ме замещения рис. 10.11, б слева |
|||||
|
направо. От источника питания |
|||||
|
асинхронный двигатель потреб- |
|||||
|
ляет активную мощность |
|||||
|
P = mU I cosϕ . |
|||||
|
1 |
1 |
1 |
1 |
|
1 |
|
Часть её в виде тепла рас- |
|||||
Рис. 10.13 |
сеивается в обмотке статора |
|||||
|
P = m R I 2 |
, |
||||
|
1 |
1 |
|
1 |
1 |
|
а другая часть – в виде потерь в сердечнике статора
Pc = m1R0I02 .
Оставшаяся часть активной мощности передаётся из статора в ротор через зазор δ посредством магнитного поля. Она называется электромагнитной мощностью и соответствует мощности, рассеиваемой на сопротивлении R2′ / s . Поэтому
Pэм = m1R2′I2′2 / s = m2R2I22 / s |
(10.20) |
184 |
|
Часть электромагнитной мощности теряется в виде тепла в активном сопротивлении обмотки ротора
P2 = m1R2′I1′2 = m2R2I22 .
Остальная часть преобразуется в механическую мощность Pмх , развиваемую на валу:
Pмх = m1R2′I2′2 (1− s) / s = m2R2I22 (1− s) / s |
(10.21) |
Часть механической мощности теряется внутри двигателя в виде механических потерь Pмх , вызванных трением в опорах и трением о воздух.
Кроме того, в двигателе существуют другие потери Pд , связанные, напри-
мер, с наличием высших гармоник магнитных полей. Эти потери называются добавочными и учитываются как 0,5% от подводимой мощности при номинальной нагрузке. Для другой нагрузки они пересчитываются пропорционально квадрату тока статора.
Таким образом, полезная мощность на валу двигателя равна
P2 = Pмх − |
Pмх − Pд |
(10.22) |
||||
Отсюда КПД двигателя |
P2 |
|
|
PΣ |
|
|
η= |
|
=1− |
, |
(10.23) |
||
P |
|
|||||
|
|
P |
|
|||
|
1 |
|
|
1 |
|
|
где PΣ = P1 + Pc + P2 + Pмх + |
Pд . |
|
|
|
||
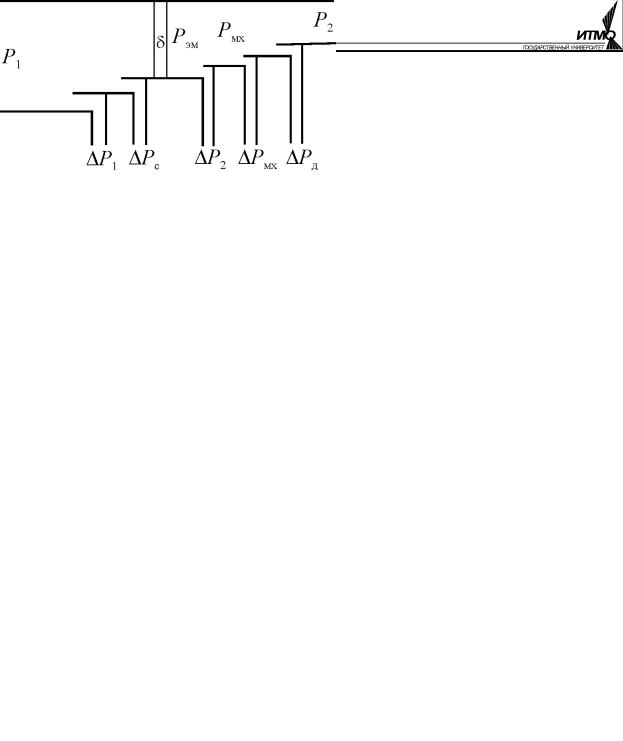
Если пренебречь механическими и добавочными потерями, то КПД асинхронного двигателя можно представить в виде функции коэффициента нагрузки β = P2 / Pном аналогично выражению для КПД трансформатора
η= |
|
βPном |
|
, |
βP |
+ P +β2 |
P |
||
|
ном |
c |
м |
|
где Pм = P1 + P2 . График зависимости η(β) изображён на рис. 10.14.
Асинхронные двигатели обладают высоким КПД. Например, КПД двигателей серии 5А мощностью от 1,5 до 250 кВт составляет соответственно 0,8…0,96.
Кроме активной мощности асинхронные двигатели потребляют реактивную мощность необходимую для возбуждения магнитного поля в машине. В режиме холостого хода коэффициент мощности двигателя очень низкий (около 0,1), т.к. активная мощность, расходуемая только на компенсацию по-
185

терь в сердечника статора и небольшие механические потери, незначительна, а реактивная мощность почти такая же, как в номинальном режиме. С увеличением нагрузки до номинальной активная мощность увеличивается, а реактивная остаётся практически постоянной и коэффициент мощности возрастает до значений 0,7…0,9.
При нагрузке менее половины от номинальной асинхронный двигатель работает с очень низким КПД и коэффициентом мощности. Поэтому при эксплуатации необходимо стремиться к тому, чтобы машина была полностью загружена.
Вопросы для самопроверки
1.Что такое электромагнитная мощность?
2.Как связаны между собой электромагнитная мощность, мощность тепловых потерь в обмотке ротора и механическая мощность?
3.Что такое коэффициент нагрузки и как он используется при расчёте КПД?
4.Как зависят от нагрузки КПД и коэффициент мощности двигателя?
5.Почему нельзя допускать работу двигателя с малой нагрузкой?
10.8. Вращающий момент и механическая характеристика
Величину вращающего момента асинхронного двигателя можно получить из выражения (10.21) с учётом того, что Pмх = M Ω и Ω = (1− s)ω1 / p
M = |
pm1R2′I2′2 |
. |
(10.24) |
|
|||
|
ω s |
|
|
|
1 |
|
|
Подставляя в (10.24) значение приведённого тока ротора из (10.19), получим
|
|
|
|
′ |
|
2 |
|
|
|
|
|
M = |
|
|
|
pm1R2U1 |
|
|
|
(10.25) |
|||
ω1s (R1 + R2′ / s)2 +(X1 + X2′ )2 |
|||||||||||
У асинхронных двигателей общего применения R1 |
X1 + X2′, поэтому выра- |
||||||||||
жение (10.25) можно несколько упростить |
|
|
|
|
|
||||||
|
|
|
|
′ |
2 |
|
|
|
|
||
M ≈ |
|
|
pm1R2U1 |
|
|
|
|
(10.26) |
|||
ω s (R′ |
/ s)2 +( |
X |
1 |
+ X ′ )2 |
|
||||||
|
|
|
|||||||||
|
|
1 |
2 |
|
|
2 |
|
|
|||
Зависимость M (s) показана на рис. 10.15. Она имеет максимумы в области генераторного и двигательного режимов
Mmax ≈ |
|
|
pmU 2 |
|
|
||
|
|
1 |
1 |
|
(10.27) |
||
2ω1 |
(X1 |
+ X2′ ) |
|||||
при скольжении |
|
||||||
|
|
R2′ |
|
|
|
||
sкр ≈ ± |
|
|
, |
(10.28) |
|||
X1 + |
X2′ |
||||||
|
|
|
|
||||
|
|
186 |
|
|
|
||
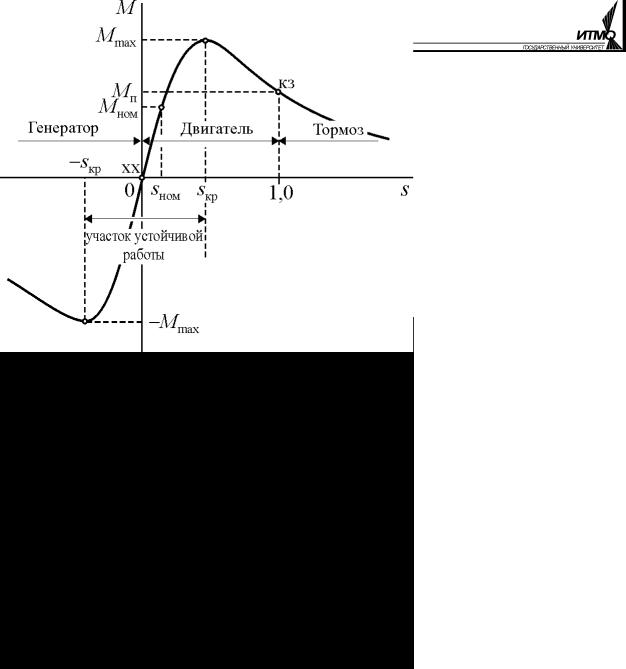
называемом критическим. Это название связано с тем, что при скольжениях больше критического работа асинхронного двигателя может быть неустойчивой. В случае s < sкр увеличение скольжения или, что то же самое, уменьше-
ние скорости вращения, приводит к увеличению вращающего момента и двигатель разгоняется, восстанавливая прежнюю скорость. Увеличение скольжения на участке характеристики, где s > sкр , приводит к уменьшению мо-
мента и ещё большему снижению скорости вплоть до полной остановки ротора. Это явление называется «опрокидыванием» двигателя и должно учитываться при эксплуатации, т.к. оно может привести к тяжёлым последствиям.
Отношение Mmax / Mном = kм называется кратностью максимального
Рис. 10.15
ант характеристики M (s) , т.н. формулу Клосса
M = |
|
2Mmax |
. |
|||
|
|
|||||
|
|
s |
+ |
sкр |
|
|
|
|
s |
s |
|||
|
|
|
||||
|
|
кр |
|
|
|
|
момента. Этот параметр имеет большое практическое значение, т.к. определяет перегрузочную способность двигателя, т.е. способность двигателя выдерживать кратковременное увеличение нагрузки без потери устойчивости и остановки. У двигателей общего применения kм =1,7…3,4 .
Подставляя (10.27) в (10.26) и с учётом то-
го, |
что |
|
из (10.28) |
|
R′ |
≈ s |
(X |
1 |
+ X ′ ), по- |
2 |
кр |
|
2 |
|
лучим ещё один вари-
(10.29)
Из выражения (10.26) при s =1 получается значение вращающего момента, развиваемого двигателем при пуске, или пускового момента
|
|
|
|
′ |
|
2 |
|
|
|
Mп = |
|
|
pm1R2U1 |
|
. |
(10.30) |
|||
ω |
(R′ )2 |
+(X |
|
+ X ′ )2 |
|
||||
|
1 |
|
|
||||||
1 |
|
2 |
|
2 |
|
|
|||
Отношение Mп / Mном = kп называется кратностью пускового момента.
У двигателей общего применения kп =1,0…2,0 .
187
Все значения вращающего момента двигателя пропорциональны U12 . Это
делает асинхронный двигатель очень чувствительным к снижению напряжения питания. Например, при снижении напряжения на 10% пусковой момент уменьшается на 19%, что значительно затрудняет пуск. При значительном понижении напряжения работающий двигатель может потерять устойчивость и остановиться.
Функция M (s) называется механической характеристикой. Характери-
стика, соответствующая номинальным значениям напряжения питания и частоты и отсутствию сопротивлений в цепях фазного ротора называется есте-
ственной механической характеристикой. Часто вместо характеристик M (s)
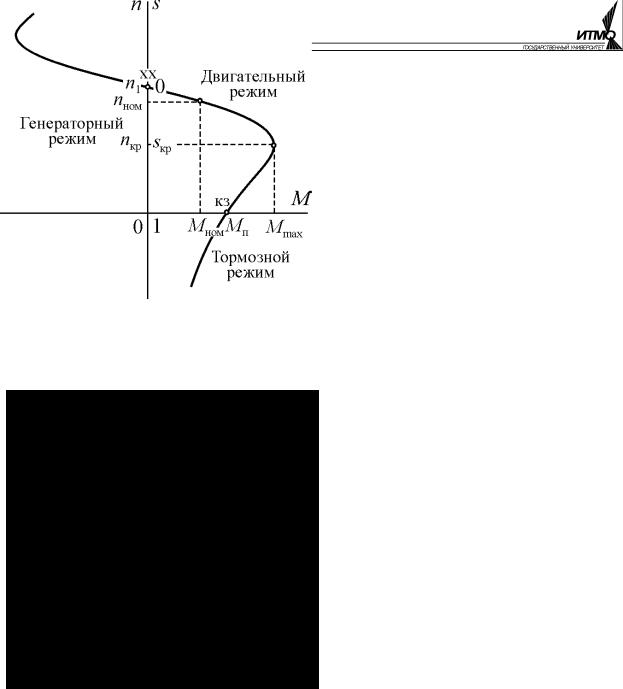
пользуются механическими характеристиками вида n(M ) или Ω(M ) (рис.
10.16). Они удобнее, т.к. деление на режимы работы в них происходит по квадрантам. Кроме того, при анализе работы других типов двигателей не пользуются понятием скольжения и строят механические характеристики в координатах nM или ΩM .
На оси ординат рис. 10.16 показаны также значения скольжения в характерных точках.
Участок механической характеристики, соответствующий области устойчивой работы, называ-
ется рабочим участком. Важней-
шим параметром этого участка, от которого зависят эксплуатационные свойства двигателя, является жёсткость. Она определяется как отношение приращения вращаю-
Рис. 10.16 щего момента к приращению скорости вращения или как производ-
ная dM / dn . Чем жёстче механическая характеристика, тем меньше изменения скорости вращения при изменении нагрузки на валу двигателя. Механическая характеристика асинхронных двигателей общего применения является жёсткой, т.к. номинальные значения скольжения находятся в диапазоне 0,02…0,05. Это означает, что при изменении нагрузочного момента от нуля до номинального значения скорость меняется на 2…5%.
Вопросы для самопроверки
1.От чего зависит величина максимального момента двигателя?
2.Чем определяется величина критического скольжения?
3.Почему скольжение, соответствующее максимальному моменту двигателя, называется критическим?
188
4.Что такое перегрузочная способность двигателя?
5.Почему асинхронный двигатель очень чувствителен к изменениям напряжения питания?
6.Что такое механическая характеристика?
7.Какие квадранты плоскости механической характеристики соответствуют режимам двигателя, генератора и тормоза?
8.Какой участок механической характеристик является рабочим?
9.Как перевести асинхронную машину в генераторный режим (в режим противовключения)?
10.Что такое жёсткость механической характеристики?
10.9. Пуск двигателя
При пуске двигатель разгоняется от нулевой скорости вращения до скорости, при которой создаваемый нагрузкой момент сопротивления Mc будет
уравновешен моментом, развиваемым двигателем M. Кроме момента сопротивления нагрузки двигатель при пуске преодолевает также динамический момент Mд = J dΩ/ dt , создаваемый моментом инерции масс всех приводи-
мых в движение тел, включая ротор – J. Для обеспечения пуска необходимо, чтобы M > Mc + Mд .
Особенностью асинхронных двигателей является относительно небольшая кратность пускового момента (1,2…2,0) при значительном токе, превосходящем номинальное значение в 5…7 раз. Поэтому при питании двигателя от сети соизмеримой мощности может возникать понижение напряжения, делающее пуск невозможным.
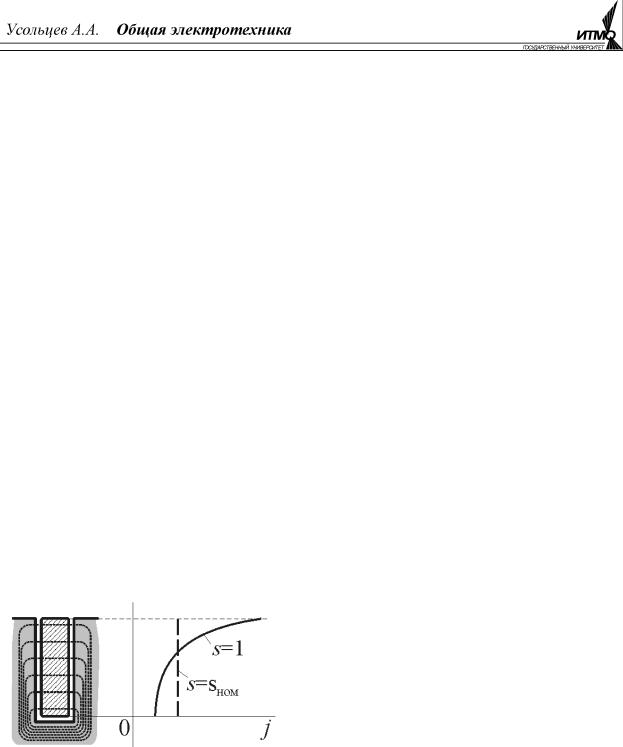
Для улучшения пусковых свойств асинхронных двигателей используют явление вытеснения тока из внутренних слоёв стержня «беличьей клетки» в наружные. Это связано с различным потокосцеплением рассеяния слоёв. У внутренних слоёв оно максимально и уменьшается по мере смещения к наружной части паза (рис. 10.17). Соот-
ветственно меняется и их индуктивное сопротивление, уменьшаясь от внутренних слоёв к наружным. При пуске частота тока в роторе максимальна и равна частоте сети. Максимальны также индуктивные сопротивления и их различие по слоям. В результате плотность тока j в стержне распределяется по кривой рис. 10.17 так, что ток в основном протекает по наружной части. Это эквивалентно уменьшению сечения и увеличению сопротивления стержня. В результате пусковой ток уменьшается, а пусковой момент возрастает.
189
По мере разгона двигателя частота тока в роторе снижается, величина индуктивного сопротивления становится близкой к нулю, и ток распределяется по стержню практически равномерно (рис. 10.17).
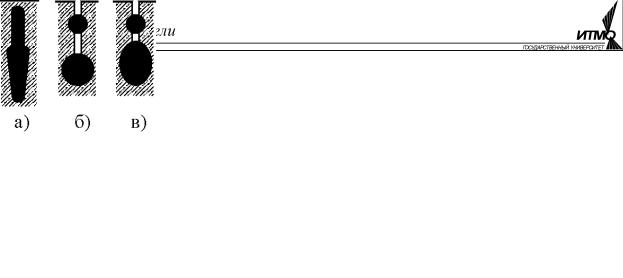
Для получения требуемого эффекта от вытеснения тока глубину паза делают приблизительно в 10 раз больше ширины. Поэтому двигатели такой конструкции называются глубокопазными. Глубину можно несколько уменьшить, если вместо прямой формы паза использовать трапецеидальную или «бутылочную» (рис. 10.18, а). В этом случае сопротивление верхней части стержня увеличивается также за счёт уменьшения сечения.
Максимальный эффект от вытеснения тока достигается в двигателях с двойной «беличьей клеткой». В верхней части паза таких двигателей располагают пусковую короткозамкнутую обмотку, а в нижней – рабочую. Пусковая обмотка изготавливается из латуни или бронзы – материалов, обладающих относительно высоким удельным сопротивлением, а рабочая – из меди. Кроме того, диаметр стержней пусковой обмотки делают меньше, чем рабочей (рис. 10.18, б и в). Таким образом, в двигателях с двойной «беличьей клеткой» используют не только эффект вытеснения тока, но и конструктивные решения, увеличивающие сопротивление пусковой обмотки. При пуске потокосцепление пусковой обмотки незначительно, а рабочая обмотка сцепляется с сильным магнитным полем. В результате практически весь ток вытесняется в пусковую обмотку. По мере разгона ток переходит в рабочую обмотку, а в пусковой – снижается. Помимо уменьшения индуктивного сопротивления рабочей обмотки после разгона, перераспределению тока способствует также то, что её сопротивление существенно меньше за счёт размера и материала стержней.
Пусковой момент двигателей с двойной «беличьей клеткой» значительно выше, чем у обычных двигателей, и несколько выше, чем у глубокопазных двигателей. Однако стоимость таких двигателей существенно больше.
Асинхронные короткозамкнутые двигатели мощностью приблизительно до 50 кВт запускаются прямым включением в сеть. Для пуска более мощных двигателей используют различную пусковую аппаратуру.
Однако при частых пусках прямое включение становится невозможным из-за перегрева двигателя пусковыми токами. В этом случае используют двигатели с фазным ротором.
В цепь фазных обмоток ротора через контактные кольца включают добавочное сопротивление Rд , разделённое на секции (рис. 10.19, а). Величина
сопротивления цепи ротора асинхронного двигателя определяет значение критического скольжения. Чем больше сопротивление, тем больше критическое скольжение и пусковой момент. Пуск производится при разомкнутых
190