

§ 8.4. Механические свойства биологических тканей
Под механическими свойствами биологических тканей понимают две их разновидности. Одна связана с процессами биологической подвижности: сокращение мышц животных, рост клеток, движение хромосом в клетках при их делении и др. Эти процессы обусловлены химическими процессами и энергетически обеспечиваются АТФ, их природа рассматривается в курсе биохимии. Условно указанную группу называют активными механическими свойствами биологических систем. Другая разновидность — пассивные механические свойства биологических тел. Рассмотрим этот вопрос применительно к биологическим тканям.
Как технический объект биологическая ткань — композиционный материал, он образован объемным сочетанием химически разнородных компонентов. Механические свойства биологической ткани отличаются от механических свойств каждого компонента, взятого в отдельности. Методы определения механических свойств биологических тканей аналогичны методам определения этих свойств у технических материалов.
Костная ткань. Кость — основной материал опорно-двигательного аппарата. В упрощенном виде можно считать, что 2/3 массы компактной костной ткани (0,5 объема) составляет неорганический материал, минеральное вещество кости — гидроксилапатит ЗСа3(Р04)2 • Са(ОН)2. Это вещество представлено в форме микроскопических кристалликов. В остальном кость состоит из органического материала, главным образом коллагена (высокомолекулярное соединение, волокнистый белок, обладающий высокоэлас-тичностью). Кристаллики гидроксилапатита расположены между коллагеновыми волокнами (фибриллами).
Плотность костной ткани 2400 кг/м3. Ее механические свойства зависят от многих факторов, в том числе от возраста, индивидуальных условий роста организма и, конечно, от участка организма.
Композиционное строение кости придает ей нужные механические свойства: твердость, упругость и прочность. Зависимость о = = /(е) для компактной костной ткани имеет характерный вид, показанный на рис. 8.18, т. е. подобна аналогичной зависимости для твердого тела (см. рис. 8.13); при небольших деформациях выполняется закон Гука. Модуль Юнга около 10 ГПа, предел прочности 100 МПа. Полезно эти данные сопоставить с данными для капрона, армированного стеклом (см. табл. 16, заметно хорошее соответствие).
Примерный вид кривых ползучести компактной костной ткани приведен на рис. 8.19. Участок ОА соответствует быстрой де-


формации, АВ — ползучести. В момент tv соответствующий точке В, нагрузка была снята. ВС соответствует быстрой деформации сокращения, CD — обратной ползучести. В результате даже за длительный период образец кости не восстанавливает своих прежних размеров, сохраняется некоторая остаточная деформация ;:ост.
Этой зависимости приближенно соответствует модель (рис. 8.20, а), сочетающая последовательное соединение пружины с моделью Кельвина—Фойхта. Временная зависимость относительной деформации показана на рис. 8.20, б. При действии постоянной нагрузки мгновенно растягивается пружина 1 (участок ОА), затем вытягивается поршень (ползучесть АВ), после прекращения нагрузки происходит быстрое сжатие пружины 1 (ВС), а пружина 2 втягивает поршень в прежнее положение (ползучесть CD). В предложенной модели не предусматривается остаточная деформация.
Схематично можно заключить, что минеральное содержимое кости обеспечивает быструю деформацию, а полимерная часть (коллаген) определяет ползучесть.
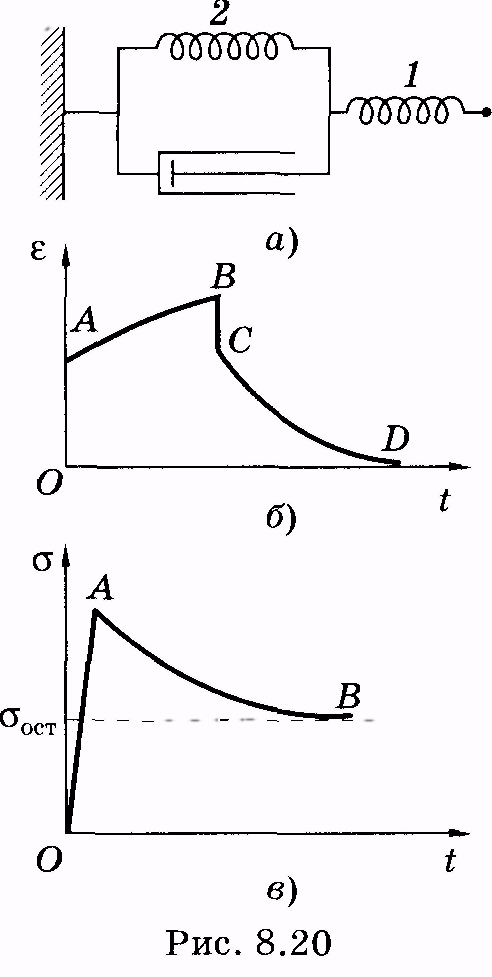
Если в кости или в ее механической модели быстро создать постоянную деформацию, то скачкообразно возникает и напряжение (участок ОА на рис. 8.20, в). На модели это означает растяжение пружины 1 и возникновение в ней напряжения. Затем (участок AS) эта пружина будет сокращаться, вытягивая поршень и растягивая пружину 2, напряжение в системе будет убывать (релаксация напряжения). Однако даже спустя значительное время сохранится остаточное напряжение оост. Для модели это означает, что не возникнет при постоянной деформации такой ситуации, чтобы пружины вернулись в недеформированное состояние.
Кожа. Она состоит из волокон коллагена, эластина (так же как и коллаген, волокнистый белок) и основной ткани — матрицы. Коллаген составляет около 75% сухой массы, а эластин — около 4%. Примерные данные по механическим свойствам приведены в табл. 17.
Эластин растягивается очень сильно (до 200—300%), примерно как резина. Коллаген может растягиваться до 10%, что соответствует капроновому волокну.
Таблица 17
|
Материал |
Модуль упругости, МПа |
Предел прочности, МПа |
|
Коллаген Эластин |
10—100 0,1—0,6 |
100 5 |
Из сказанного ясно, что кожа является вязкоупругим материалом с высокоэластическими свойствами, она хорошо растягивается и удлиняется.
Мышцы. В состав мышц входит соединительная ткань, состоящая из волокон коллагена и эластина. Поэтому механические свойства мышц подобны механическим свойствам полимеров.
Релаксация напряжения в гладких мышцах соответствует модели Максвелла (см. рис. 8.15, в; 8.16, б). Поэтому гладкие мышцы могут значительно растягиваться без особого напряжения, что способствует увеличению объема полых органов, например мочевого пузыря.
Механическое поведение скелетной мышцы соответствует модели, представленной на рис. 8.20, а. При быстром растяжении мышц на определенную величину напряжение резко возрастает, а затем уменьшается до оост (см. рис. 8.20, в).
Зависимость о = де) для скелетной мышцы нелинейна (рис. 8.21). Анализ этой кривой показывает, что примерно до е ~ 0,25 в портняжной мышце лягушки механизм деформации обусловлен распрямлением молекул коллагена (см. § 8.3). При большей деформации происходит увеличение межатомных расстояний в молекулах.
Ткань кровеносных сосудов (сосудистая ткань). Механические свойства кровеносных сосудов определяются главным образом свойствами коллагена, эластина и гладких мышечных волокон. Содержание этих составляющих сосудистой ткани изменяется по ходу кровеносной системы: отношение эластина к коллагену в общей сонной артерии 2:1, а в бедренной артерии 1 : 2. С удалением от сердца увеличивается доля гладких мышечных волокон, в артерио-лах они уже являются основной составляющей сосудистой ткани.
При детальном исследовании механических свойств сосудистой ткани различают, каким образом вырезан из сосуда образец (вдоль или поперек сосуда). Можно, однако, рассматривать деформацию сосуда в целом как результат действия давления изнутри на упругий цилиндр.


Рассмотрим цилиндрическую часть кровеносного сосуда длиной I, толщиной h и радиусом внутренней части г. Сечения вдоль и поперек оси цилиндра показаны на рис. 8.22, а, б. Две половины цилиндрического сосуда взаимодействуют между собой по сечениям стенок цилиндра (заштрихованные области на рис. 8.22, а). Общая площадь этого «сечения взаимодействия» равна 2hl. Если в сосудистой стенке существует механическое напряжение σ, то сила взаимодействия двух половинок сосуда равна
F = σ • 2hl. (8.10)
Эта сила уравновешивается силами давления на цилиндр изнутри (они показаны стрелками на рис. 8.22, б). Силы направлены под разными углами к горизонтальной плоскости (на рисунке). Для того чтобы найти их равнодействующую, следует просуммировать горизонтальные проекции. Однако проще найти равнодействующую силу, если умножить давление на проекцию площади полуцилиндра на вертикальную плоскость ОО'. Эта проекция равна 2rl. Тогда выражение для силы через давление имеет вид
F=p • 2rl. (8.11)
Приравнивая (8.10) и (8.11), получаем σ • 2hl = р • 2rl, откуда
![]()
Это уравнение Ламе.
Будем считать, что при растяжении сосуда объем его стенки не изменяется (площадь стенки возрастает, а толщина убывает), т. е. не изменяется площадь сечения стенки сосуда (рис. 8.22, б):
![]()
![]()
(8.14)
Из (8.14) видно, что в капиллярах (г -» 0) напряжение отсутствует (а —> 0).
В заключение отметим разделы и направления медицины, для которых особо важно иметь представление о пассивных механических свойствах биологических тканей:
в космической медицине, так как человек находится в но вых, экстремальных, условиях обитания;
в спортивной медицине результативность достижений и ее возрастание побуждают спортивных медиков обращать внимание на физические возможности опорно-двигательного аппарата человека;
механические свойства тканей необходимо учитывать гиги енистам при защите человека от действия вибраций;
в протезировании при замене естественных органов и тка ней искусственными также важно знать механические свойства и параметры биологических объектов;
в судебной медицине следует знать устойчивость биологиче ских структур по отношению к различным деформациям;
в травматологии и ортопедии вопросы механического воз действия на организм являются определяющими.
Этот перечень не исчерпывает значения материала, изложенного в настоящей главе, для врачебного образования.
Дополнительный материал
Перечень вопросов
Введение
Механические свойства биологических тканей. Вязкоупругие, упруговязкие и и вязкопластичные системы. Механические свойства мыщц, костей, кровеносных сосудов, легких.
Задачи, объекты и методы биомеханики.
Значение биомеханики для медицины
Биомеханика опорно-двигательной системы человека. Биомеханические аспекты остеогенеза .
Сочленение и рычаги в опорно-двигательном аппарате человека.
Эргометрия. Механические свойства тканей организма.
Тема:
Основы биомеханики
Введение
Механические процессы в живом мире протекают на разных уровнях организации, от целого организма до клетки и субклеточных структур, и относятся к числу важнейших явлений в организме. Биомеханические явления весьма разнохарактерны и включают в себя такие процессы, как функционирование опорно-двигательной системы организма, процессы деформации тканей и клеток, распространение волн упругой деформации, сокращение и расслабление мышц, конвекционное движение биологических жидкостей и легочного газа.

Момент инерции (J) материальной точки равен произведению массы (m) материальной точки на квадрат расстояния (г) этой точки от оси вращения:
J=mr2
Момент инерции твердого тела
![]() ,
,
где интегрирование должно проводиться по всему объему тела
Если для какого-либо тела известен его момент инерции (J0) относительно оси, проходящей через центр тяжести, то момент инерции (J) относительно любой оси, параллельной первой, может быть найден по формуле
J = J0 + mа2,
где а — расстояние от центра тяжести тела до оси вращения; m — масса тела.
Момент инерции различных однородных тел массой m относительно оси, проходящей через центр масс: шара радиусом R
J= mR22/5,
цилиндра с внутренним радиусом r и внешним R (ось враще ния совпадает с геометрической осью цилиндра)
J= m(r2+R2)/2
В частном случае момент инерции: тонкостенного цилиндра (R ≈ г)
J=mR2
сплошного цилиндра (г=0)
J= mR2/2;
тонкого стержня длиной l (ось вращения проходит перпендикулярно стержню через его середину)
J=ml2/12
Момент силы относительно оси вращения равен произведению силы F на плечо l:
![]() ,
,
где l— кратчайшее расстояние от оси вращения до линии действия силы.
Изменение момента количества движения пропорционально величине приложенного момента силы и времени его действия (основное уравнение динамики вращательного движения):
dL = Mdt,
где dL — изменение момента количества движения.
Момент количества движения L равен произведению момента инерции J на угловую скорость вращения ωо, т. е.
L = Jω0;
М — момент силы, приложенной к телу; dt — промежуток времени, в течение которого на тело действовала сила.
Момент импульса (момент количества движения) материальной точки
Li=miviri
Момент импульса тела
![]()
Если момент инерции тела постоянен, то основное уравнение динамики вращательного движения можно записать в виде
Jdω0 = Mdt или М =Jε,
где ε — угловое ускорение.
Для изолированного тела, способного изменять момент инерции при вращении, закон сохранения момента количества движения можно записать так:
L = const или Jω0 = const.
Кинетическая энергия вращающегося тела
![]()
Кинетическая энергия тела, вращающегося с угловой скоростью ω вокруг оси, при поступательном движении оси со скоростью v
Ek=Jω2/2+mv2/2
Элементарная работа во вращательном движении
dA=Mdφ
где М — момент силы, приложенной к телу. Работа силы при вращательном движении
где углы φ1 и φ2 соответствуют начальному и конечному положениям радиуса-вектора любой точки твердого тела.
Сила, действующая на частицу со стороны окружающей жидкости, при центрифугировании
F1 = ρ0Vω2r,
где ρ0 — плотность жидкости, V — объем частицы, ω — угловая скорость вращения, r — расстояние частицы от оси вращения.
Сила, действующая на частицу при ее движении по окружности,
F = ρ1Vω2r,
где ρ1— плотность вещества частицы. ПриF1≠Fпроисходитперемещение частицы в направлении к оси вращения (при F1> >F) или от оси (при F1<.F).
МЕХАНИЧЕСКИЕ СВОЙСТВА БИОЛОГИЧЕСКИХ ТКАНЕЙ.
ВЯЗКОУПРУГИЕ, УПРУГОВЯЗКИЕ И ВЯЗКОПЛАСТИЧНЫЕ
СИСТЕМЫ. МЕХАНИЧЕСКИЕ СВОЙСТВА МЫШЦ, КОСТЕЙ,
КРОВЕНОСНЫХ СОСУДОВ, ЛЁГКИХ
Под влиянием механических воздействий (природных и искусственных) в биологических тканях, органах и системах появляется механическое движение, возникают деформации и напряжения.
Физиологический ответ на эти воздействия зависит от механических свойств биологических тканей и жидкостей. Знания, как меняются под механическим воздействием свойства биологических тканей и жидкостей, важно для понимания физиологии органа, организма и проявления патологического процесса, являются фундаментом профилактики, защиты организм от вредного воздействия и используются для применения искусственных органов и тканей.
Биологические ткани, обладают сложной анизотропной структурой, зависящей от функций, для которых они предназначены. Обычно биологические ткани испытывают большие деформации. Зависимость между силами и удлинениями, соответственно между напряжениями и деформациями, устанавливается экспериментальным образом и имеет нелинейный характер.
Деформациейназывают изменение взаимного положения точек тела при котором меняются расстояния между ними в результате внешнего воздействия.Деформации могут быть вызваны внешними воздействиями или изменением температуры.
Деформацию
называют упругой, если после прекращения
действия силы она исчезает. Неупругие
деформации являются пластическими.
Мерой деформации служит относительная
деформация
![]() ,
гдех- первоначальное значение
величины, характеризующей деформацию,
аDх- изменение
этой величины при деформации.
,
гдех- первоначальное значение
величины, характеризующей деформацию,
аDх- изменение
этой величины при деформации.
Напряжениемназывают внутреннюю силу возникающую в деформированном теле под внешним воздействием, отнесенную к площади поперечного сечения тела перпендикулярной силе:
![]()
Упругие деформации подчиняются закону Гука, согласно которому напряжение пропорционально относительной деформации:

где Е - модуль упругости, он равен напряжению, возникшему при относительной деформации, равной единице. При односторонней деформацииЕназывают также модулем Юнга.
Закон Гука обычно справедлив при малых деформациях. Экспериментальная кривая растяжения приведена на рисунке.
Д C s

B
A



![]()
O
Участок ОА соответствует упругим деформациям, точка В - пределу упругости, характеризующему то максимальное напряжение, при котором ещё не имеют места деформации, остающиеся в теле после снятия напряжения (остаточные деформации).
Горизонтальный участок СД кривой растяжения соответствует пределу текучести - напряжению, начиная с которого деформация возрастает без увеличения напряжения. И наконец, напряжение, определяемое наибольшей нагрузкой, выдерживаемой перед разрушением, является пределом прочности.
Биологические структуры, мышцы, сухожилия, кровеносные сосуды, легочная ткань и др., представляют собой вязкоупругие или упруговязкие системы. То есть их механические свойства, проявляющиеся при действии внешней силы, можно промоделировать сочетанием упругих и вязких элементов (рисунок).









а б
а) идеально упругая пружина б) чисто вязкостный элемент
Примером чисто упругого элемента служит идеально упругая пружина, в которой процесс деформации подчиняется закону Гука:
![]() , ()
, ()
где
![]() - напряжение;
- напряжение;
F- упругая сила, равная внешней силе (нагрузке), которая приложена перпендикулярно к поперечному сечению с площадью “S”;
Е- модуль упругости;
![]() -
относительная деформация;
-
относительная деформация;
“х” и“Dх” - исходная длина и её изменение при деформации.
Пример чисто вязкостного элемента - цилиндр с вязкой жидкостью и неплотным поршнем. Изменение длины вязкостного элемента пропорционально времени “t” и зависит от приложенной силы “f”, площади поперечного сечения моделируемого объекта “S”, его исходной длины “х” и вязкости вещества этого объекта “h“ в соответствии с уравнением:
![]() .
.
При приложении растягивающей силы к гладким мышцам они ведут себя в основном подобно телу Максвелла:
ббh
а

Начальное напряжение, обусловленное упругостью элемента “Е”, постепенно исчезает из-за необратимой деформации в вязком элементе “б“. Это способствует большой растяжимости полых органов, содержащих гладкие мышцы, например, мочевого пузыря.
б

а1а2
Но в отличие от этой механической модели мышца характеризуется нелинейной зависимостью напряжения от длины:
s![]()


l(м)

Соответственно модуль упругости “Е” мышцы будет не постоянным, а различным при разных нагрузках. Находят такой модуль упругости (называемый эффективным или тангенциальным) по модифицированному уравнению:
![]() ,
,
где dl- небольшое увеличение длины, аds- cоответствующее увеличение напряжения. На графике зависимости “s“ от “l” (кривая растяжения) величина “Е” находится через тангенс угла наклона касательной к оси “l” в точках, соответствующих интересующей нас “l” (абсцисса) или “s“ (ордината).
Почти все мягкие ткани человека проявляют свойства вязкоупругости и вязкопластичности. Механические свойства биологических тканей имеют индивидуальный характер и зависят от многих параметров - возраста, способа питания, среды и т.п.
Установлено, например, что прочность тканей и органов увеличивается до 20 лет и после этого начинает убывать, а прочность зубов и кожи увеличивается до 50-летнего возраста.
При исследовании биологических тканей на растяжение экспериментальным путем установлено, как это было сказано выше, что они имеют ясно выраженный нелинейный характер (рисунок).
s s
- e диаграмма
мягкой ткани
s
- e диаграмма
мягкой ткани
(e- деформация)

![]()


Ка уже
указывалось, основной характеристикой
деформационного поведения материала
является кривая напряжение-деформация
(s = f(e)илиs=f(l),гдеs -
напряжение,e-
деформация, l
-удлинение). Кривые напряжение-деформация
биологических тканей нелинейны, причём
эта нелинейность имеет такой характер,
который не встречается в технике. Теорию
упругого поведения биологических тканей
создал Фанг Я.Ч. Им было показано, что
напряжение и растяжение связаны
соотношением![]() ,
что дает экспоненциальную зависимость
вида
,
что дает экспоненциальную зависимость
вида![]() . После удовлетворения начальным условиям
(s=0, приl=1)
закон Фанга трансформировался и
используется в настоящее время в двух
формах:
. После удовлетворения начальным условиям
(s=0, приl=1)
закон Фанга трансформировался и
используется в настоящее время в двух
формах:
![]() ,
,
где s* - значение напряжения в точкеl*, и
 .
.
Справедливость этих функций была показана на широком классе биологических тканей: портняжная мышца лягушки, капиллярная мышца кролика, кожа человека, сосудистая стенка, костная мозоль и т.д.). Причем первая формула хорошо работает при l £1,5 , а вторая - вплоть доl= 2,5.
При экспериментах с мягкими тканями наблюдается первая зона, для которой характерно значительное удлинение при небольших растягивающих напряжениях. В коже, например, это удлинение может достигать 70-100;% первоначальной длины. Этот эффект получается от распрямления S - образных образований молекул. Для костной ткани этой зоны нет.
В следующих зонах ткань начинает сопротивляться нагрузке и на диаграмме появляется характерный удлинённый S-образный участок. В первом приближении для этой зоны можно принять, что материал ткани подчиняется закону Гука.
В следующей зоне удлинение продолжается при небольшом увеличении нагрузки. Эта зона предшествует разрушению образца. Динамическое нарушение тканей оказывает более благоприятное влияние на их рост, чем статическое нагружение.
Механические свойства мягких тканей во многом обусловлены их строением. Позвоночные животные имеют три вида мышц: гладкие мышцы в стенках полых органов, поперечно-полосатые мышцы сердца и поперечно-полосатые скелетные мышцы.
Мышцы имеют волокнистое строение. Под обычным микроскопом без труда наблюдается поперечно-полосатая структура мышечных волокон. Отдельное мышечное волокно имеет диаметр 0,02-0,08 мм. Оно окружено мембраной, толщина которой около 10 мм. Волокно состоит из 1000-2000 более тонких волокон-миофибрилл диаметром 1-2 мкм. Фибриллы имеют оболочку, образованную трубочками и пузырьками саркоплазматического ретикулума. Мышца содержит также митохондрии, расположенные между фибриллами. Миофибрилла в свою очередь состоит из ряда белковых нитей - толстых и тонких. Симметрия их расположения в поперечном сечении гексагональна (рисунок).
Схема участка поперечного
 сечения миофибриллы.
сечения миофибриллы.
1 – толстые нити,
2 – тонкие нити.
1 2
На рисунке показано продольное сечение миофибриллы.
Z Z H

Схема строения саркомера.
I I A
Черные линии - это так называемые Z-линии (Z- диски, имеющие вид линий в продольном сечении). Участок миофибриллы между двумяZ-линиями называется саркомером. Он разделяется на несколько зон. Центральная полоса-А анизотропна и обладает двойным лучепреломлением. К ней примыкают с двух сторон изотропные I-полосы. При растяжении покоящейся мышцы в серединеА-полосы появляется зонаНменьшей плотности.
Толстые нити образованы белком миозином, тонкие - в основном белком актином. Каждая толстая нить состоит из 180-360 продольно ориентированных молекул миозина, ответственных за анизотропию плотной А-полосы. Менее плотнаяI-полоса образована тонкими нитями актина, молекулы которого представляют собой двойные спирали (F- форма актина), возникшие в результате полимеризации глобулярногоG- актина. В саркоме числоG-глобул равно примерно 800 на одну тонкую нить. Тонкие нитиF-актина проходят черезZ-диски.
У высших позвоночных молярное отношение актина к миозину примерно равно 4:1, весовое отношение 1:2.
При сокращении (укорочении) мышцы происходит сужение I-полос без изменения протяженностиА-полосы.Z-диски движутся навстречу друг другу. В конечном счётеI-полосы исчезают вовсе, а в центре саркомера появляется уплотнение. Объем сакромера при укорочении меняется мало, следовательно, он становится толще.
Очевидно, вещество А-полосы более жёстко, чем веществоI-полос. Электронная микроскопия показывает, что при укорочении толстые нити вдвигаются между тонкими и саркомер укорачивается подобно подзорной трубе.
Скелетные мышцы состоят из волокон (клеток) и соединительной ткани. Они присоединяется к костям скелета при помощи сухожилий. В веретенообразных мышцах волокна расположены главным образом параллельно друг другу. Каждое волокно окружено тонкой оболочкой (сарколемой), а её внутренность состоит из протоплазмы (сарко-плазмы), в которой расположены тонкие нити (миофибриллы) толщиной до 2 мкм и множество ядер. Мышечные волокна имеют длину до 10 см и толщину около 50 мкм (приближённо равна толщине волоса). Волокна образуют сократительный механизм мышцы. Поперечные Z-мембраны разделяют каждую миофибриллу на волокна поменьше -саркомеры, которые представляют собой мельчайшие образования, обладающие способностью сокращаться.








3 2 1 3






a) б)
Расположение нитей актина и миозина.
а) нормальное состояние,
б) сокращение мышцы.
1 – миозин, 2 – актин, 3 – смешанный компонент.
Во всяком мышечном волокне имеются несколько миофибрилл, которые со своей стороны разделяются на два вида нитей, называемых протофибриллами, связанных между собой мостиками. Тонкие протофибриллы состоят из белковых молекул, называемых актинами, а толстые протофибриллы - и молекул, называемых миозинами (см. рисунок).
В процессе сокращения производится сдвиг протофибрилл, при котором тонкие нити заходят между толстыми. В активизированном состоянии нити актина и миозина зацепляются между собой при помощи мостиков, являющихся элементами молекул миозина. Любой саркомер сокращается приблизительно на 20% или 0,5 мкм.
Сила мышцы на 1 см2её поперечного сечения называется абсолютной мышечной силой. Для человека она равна от 50 до 100 Н.
Работа мышечной ткани осуществляется благодаря сокращению (укорачиванию с утолщением) миофибрилл, которые находятся в мышечных клетках).
Всякое мышечное волокно представляет собой многоядерную цилиндрическую клетку, имеющую диаметр от 10 до 100 мкм и длину от нескольких миллиметров до нескольких см.
Мышечные волокна окружены соединительной тканью, состоящей из волокон коллагена и эластина. Прочность волокон коллагена можно сравнить с прочностью стали - настолько она велика. Волокна эластина обладают способностью растягиваться упругим образом подобно резине. Связь мышц с сухожилиями осуществляется посредством коллагеновых волокон соединительной ткани.
При исследовании жёсткости в диапазоне малых синусоидальных деформаций напряжение сердечной мышцы удовлетворяет закону Гука. В этом случае модуль упругости зависит от начальной длины мышцы, температуры и вида объекта. В желудочке кролика при 300С иl = 1,14 l0Е = 2,6×105Н/м2, приl= 1,23l0Е = 5,7×105Н/м2 и при l= 1,31l0 Е= 8,9×105Н/м2. В предсердии значения модуля упругости соответственно равны 3,0×105, 6,9×105и 19,1×105Н/м2. Определенная таким образом жёсткость предсердий выше жёсткости желудочков. На примере желудочка видна зависимость модуля упругости от температуры. При 200С модуль упругости возрастает до 4,5×105Н/м2приl=1,14l0и до 12,7×105Н/м2приl = 1,31l0.
Сердечная мышца ведёт себя как вязко-упругое тело.
Коллаген, эластин и связующее вещество составляет основу биотканей.
Прочность костной ткани должна быть значительной, поскольку она является основным материалом опорно-двигательной системы. Она зависит от химического состава, общей структуры, системы внутреннего армирования, количества и прочности компонентов, ориентации основных компонентов по отношению к продольной оси кости, возраста, плотности, индивидуальных условий роста соответствующего организма, условий хранения экспериментальных костных образцов, участка кости, с которого снят образец, и т.д.
Компактная костная ткань обладает специфичным композиционным строением. Она представляет собой среду с пятью структурными уровнями.
Плотность костной ткани приблизительно равна 2,4 г/см3.
Возраст оказывает существенное влияние на прочность костной ткани. С увеличением возраста в костной ткани появляются изменения её химического состава и внутренней структуры.
Из экспериментов установлено, что для костной ткани самым опасным является растягивающее напряжение.
Диаграмма s - eкостной ткани показана на рисунке.
smax




e

При небольших деформациях для костей справедлив закон Гука: напряжение пропорционально относительной деформации, модуль упругости не зависит от напряжения. Модуль упругости костей может достигать ~109Н/м2, то есть может превышать эффективные модули упругости мышц практически при всех нетравмирующих нагрузках.
Прочность костной ткани на растяжение при разрушении меняется от 150 до 177 МПа в зависимости от зоны поперечного сечения, с которой взят соответствующий экспериментальный образец. Эта прочность зависит от прочности отдельных компонентов: гидроксилапатита - с 600 до 700 МПа, коллагена - с 50 до 100 МПа.
Принимается, что волокна костной ткани деформируются преимущественно упругим образом, а матрицы (остальная ткань) - пластически и разрушаются хрупким образом.
Прочность костей на сжатие высокая. Несущая способность бедренной кости в продольном направлении выше 45000 Н для мужчин и 39000 Н для женщин. Образцы компактной кости, взятые с разных мест, обладают предельными напряжениями на сжатие от 120 до 170МПа.
Несущая способность костей при изгибе значительно меньше. Так, например, бедренная кость выдерживает нагрузку на изгиб до 2500 Н. Установлено, что прочность на кручение является наибольшей в возрасте от 25 до 35 лет (105,4 МПа), и после этого постепенно убывает. Для возрастной группы с 75 до 89 лет она достигает в среднем 90,3МПа.
Прочностные деформационные свойства стенок кровеносных сосудов и изменение этих свойств с возрастом имеют большое значение для медицины. Они также в некоторой степени зависят от структуры и биохимического состава ткани соответствующих сосудов.
Кровеносные сосуды состоят их трёх концентрических слоёв. Самый внутренний называется интимой, средний - сосудистой оболочкой, и наружный - внешней сосудистой оболочкой. Механические свойства кровеносных сосудов обусловливаются главным образом, свойствами средней сосудистой оболочки, состоящей из коллагена, эластина и гладких мышечных волокон. Эластин растягивается очень сильно (допускает деформацию до 200-300%), обладает ярко выраженным нелинейным механическим поведением с переменным модулем упругости от 1 ×105до 6×105Па. Чистый коллаген растягивается меньше (предельные деформации до 10%) и тоже обнаруживает нелинейное механическое поведение. Его модуль упругости достигает значений от 1×107до 1×108Па, то есть он уже относительно высок.
Гладкие мышечные клетки могут менять свою длину (сокращаться) под действием нервных или химических стимуляторов. В результате этого меняются их механические свойства - модуль упругости от 1 ×104Па для нестимулированной мышцы возрастает примерно в десять раз для активированного состояния.
Разные авторы дают модули упругости для артериальных сосудов в пределах от 0,6 ×105до 7×105Па в зависимости от локализации, направления ориентации и деформаций, при которых они определяются. Модуль сдвига для передней стенки аорты G = 0,84 МПа при напряжении 0,05 МПа, что соответствует физиологическому состоянию организма.
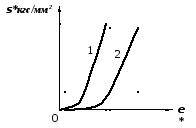
На рисунке даны характерные диаграммы экспериментально установленных зависимостей между напряжениями и деформациями в продольном направлении различных артериальных сосудов: 1 – под- вздошная артерия, 2 - внутренняя сонная артерия.
Задачи, объекты и методы биомеханики.
Биомеханика- раздел биофизики, изучающий механические свойства живых тканей, органов и организма в целом, а также физические явления, происходящие в них в процессе жизнедеятельности и перемещения тела в пространстве (при движениях, дыхании, кровообращении).
Опираясь на данные анатомии и используя методы теоретической и прикладной механики, биомеханика исследует деформации структурных элементов тела, движение жидкостей и газов в живом организме, перемещения звеньев тела относительно друг друга и всего тела в пространстве, устойчивость и управляемость движений, и другие вопросы, доступные методам механики.
Биомеханика движений исследует структуру опорно-двигательного аппарата (характер подвижных сочленений, число степеней свободы), кинематику движений (скорость, ускорения, траектории), динамику движений - картину действующих сил. Чаще всего задача биомеханического исследования состоит в том, чтобы по кинематическим характеристикам движения определить картину действующих сил.
Современная биомеханика не ограничивается анализом движений. Сфера приложения биомеханики расширяется, и сейчас она включает в себя изучение дыхательной системы, системы кровообращения, специализированных рецепторов и т.п.
Биомеханика дыхательного аппарата изучает кинематику и динамику дыхательных движений, сопротивление дыханию, обусловленное трением воздуха при движении по гортани, трахее и бронхам (неэластическое сопротивление), сопротивление, связанное с упругостью грудной клетки, эластичностью тканей легких, а также поверхностным натяжением жидкости, тонким слоем покрывающим аловеолы (эластическое сопротивление).
Биомеханика кровообращения изучает реологические свойства крови, сосудистой стенки и периваскулярных тканей, особенности тока крови в ветвящихся сосудах, в сосудах малого диаметра и капиллярах, гидродинамические явления в полостях сердца и магистральных сосудах, возникновение акустических колебаний в сердечно-сосудистой системе, вопросы теплообмена и др.
Начало исследований по биомеханике было положено Леонардо да Винчи. Изучая полет птиц и движения человека, работу скелетных мышц и сердца, механику дыхания и голосообразования, он считал, что функционирование ряда систем организма подчинено законам механики.
Значительное влияние на развитие биомеханики оказали труды Джованни Борелли (1608-1679г.) итальянского анатома и физиолога, в книге “О движении животных” он дает анализ различных движений тела при ходьбе, беге, плавании и позиций механики. Борелли впервые определил положение центра тяжести тела человека. Экспериментальное исследование ходьбы было проведено братьями Вебер (E. и W. Weber, 1836 г.) и т.д.
В России начало изучения вопросов биомеханики положено работами И.М.Сеченова и П.Ф.Лесгафта. В “Очерках рабочих движений человека” (1901 г.) И.М.Сеченов дал сводку важнейших биомеханических характеристик движений человека. Кроме того следует отметить работы А.А.Ухтомского (“Физиология двигательного аппарата” - 1927 г.), Н.В.Парийского. Значительный вклад в развитие биомеханики внёс Н.А.Бернштейн, значительно усовершенствовавший методы регистрации и анализа движений и др.
Методы биомеханических исследований включают различные приемы регистрации положения и движения тела, измерений силы групп мышц, моментов инерции звеньев тела и др. Для изучения положения тела существуют приборы, позволяющие определять положение общего центра тяжести по отношению к поверхности опоры, величину опорного контура, степень устойчивости тела в пространстве. Для регистрации движений используются различные варианты световой записи.
Циклография заключается в регистрации на неподвижной фотопластинке нескольких избранных точек движущегося тела. Для регистрации движений, траектории которых могут накладываться друг на друга (например, циклические движения), применяют кимоциклографию - регистрацию движений на равномерно движущейся пленке. Система обработки циклограмм (циклограмметрия) позволяет по циклограмме определить амплитуду движения, скорости и ускорения. Большое распространение получили методы электрической регистрации биомеханических параметров движения. С помощью различных датчиков можно непосредственно регистрировать кривые движения в суставах, составляющие опорных реакций и точку приложения их равнодействующей, линейные и угловые скорости и ускорения и др.
При изучении рабочих движений человека используют специальные насадки к рабочему инструменту с датчиками, позволяющими регистрировать величину прилагаемых мышечных моментов в различных плоскостях, силу удара и т.п. При электрической регистрации параметров движения возможен их непосредственный ввод в ЭВМ. Это даёт возможность получения в реальном масштабе времени таких важнейших показателей движения, как моменты сил, действующих в суставе, работа и мощность.
Значение биомеханики для медицины.
Результаты биомеханических исследований представляют интерес для физиологии и клинической медицины. На основе этих исследований могут быть составлены биомеханические характеристики органов и систем организма, знание которых является важнейшей предпосылкой для изучения процессов регуляции. Значительный интерес биомеханика представляет для протезирования. Многие характеристики опорно-двигательного аппарата используются при проектировании других технических систем (бионика).
Ряд биомеханических показателей состояния кровообращения (например, баллистокардиография, динамокардиография) и дыхания играет роль важных количественных показателей в диагностике, в определении показаний и противопоказаний к операциям на сердце и лёгких.
Исследования биомеханики дыхания и кровообращения использованы при создании аппарата “сердце-лёгкие”. Характеристики прочности костей, суставов и связок, упруго-вязких свойств мышц и других тканей представляют значительный интерес для травмотологии и ортопедии, для понимания механизмов действия повреждающих факторов и предупреждения травм.
Биомеханика опорно-двигательной системы человека. Биомеханические аспекты остеогенеза.
Остео - (греч. osteou) - кость.
Генез - (греч. genesis) - часть сложного слова, означающая: связанный с процессом образования, возникновения.
Изучение динамики опорно-двигательной системы человека имеет целью изучить закономерности движения организма в пространстве и во времени и определить эффективность этих движений.
Опорно-двигательная система человека состоит из костей, суставов, связок и мышц. Это основная система, которая оформляет структуру человека и дает ему возможность выполнять основное свойство - двигаться, что играет основную роль в жизни. Движение совершается в местах соединений костей - в суставах. Мышцы обладают основным свойством - сокращаться и приводить таким образом в движение рычаги костей. Поэтому кости и их соединения являются пассивной частью двигательного аппарата, а мышцы - активной.
Кости позвоночного столба и нижних конечностей выполняют, в основном, опорную функцию. Кости черепа, позвоночного столба и грудной клетки выполняют защитные функции соответственно по отношению к мозгу, спинному мозгу, лёгким и сердцу. Двигательная функция осуществляется главным образом конечностями.
Вес скелета составляет для мужчин 18%, а для женщин 16% общего веса. Он является местом накопления минеральных солей организма - фосфора, кальция, железа и др. Скелет взрослого человека имеет 206 костей. Любая кость скелета занимает определенное место и положение в человеческом теле, имеет свою форму и строение и выполняет определённые функции.
Соединений в скелете приблизительно 150. Почти половина из них - суставы, самые подвижные соединения скелета. Многочисленные связки скрепляют суставы, обеспечивающие определенную кинематику движения и очень часто ограничивают их диапазон. Существует множество суставов со сложной кинематикой взаимного движения соединяемых костей скелета.
Силы, которые появляются в человеческом теле при движении и в процессе труда, имеют динамический характер. И здесь наблюдается влияние принципа целесообразности в структуре опорно-двигательной системы, где развиты образования, имеющие целью ослабить удары.
Движение твердого тела описывается в прямоугольной системе координат. Произвольное перемещение и поворот тела вокруг произвольной оси можно разложить соответственно на три перемещения по координатным осям и на три поворота вокруг них. Поэтому для полного описания движения жесткого тела нужно 6 величин (то есть 3 поступательных и 3 вращательных).
Независимые друг от друга величины, определяющие состояние данной физической системы, называются степенями свободы этой системы.
Жесткое тело, которое соединяется шарниром с другим телом, называется звеном. Звено имеет ограниченную свободу движения и меньше степеней свободы. Когда звено прикреплено к другому телу, принимаемому за неподвижное, степени свободы определяются возможностями перемещений и поворотов.
Опорно-двигательный механизм человека представляет собой исключительно сложную систему со многими степенями свободы. Когда две кости соединяются между собой суставом, они образуют кинематическую пару, а когда несколько костей соединяются последовательно суставами, они образуют кинематическую цепь.
Общее число степеней свободы равно разности между степенями свободы звеньев, когда они свободны, и числом ограничений (связей) в соединениях. Число степеней свободы определяется по формуле:
n = 6N - S i P(i), i = 5,4,3,
где n- число степеней свободы,N- число подвижных звеньев,i- число ограничений степеней свободы в соединениях,P(i)- число соединений, имеющих “i” ограничений;S P(i) = N - 1.
Общее число степеней свободы человеческого тела равно около:
6 × 144 - 5 × 81 - 4 × 33 - 3 × 29 = 240.
В процессе движения тела степени свободы находятся под контролем нервно-мышечного аппарата. Основная задача координации движений состоит в подчинении лишних степеней свободы, одной единой управляющей системе. Трудность этой задачи видна из того, что число степеней свободы больше двухсот.
Динамические модели опорно-двигательного аппарата принадлежат к классу склерономных голономных механических систем, к которым можно применить результаты классической механики. Живые организмы тоже подчиняются принципу сохранения механической энергии.
![]()
где Е- механическая энергия,Ек- кинетическая энергия,Еп - потенциальная энергия, Fl- внешние силы,Vl – скорости точек приложения внешних сил,Мk - моменты сил в суставах,wk- угловые скорости, соответствующие моментам.
Кинетическая энергия определяется только скоростью движения материальных частиц организма, а потенциальная - положением этих частиц в гравитационном поле. Компоненты механической энергии определяются при помощи циклограммы или другими способами. Ими определяются положения и скорости центра тяжести отдельных звеньев. Выражая механическую энергию через измеренные таким образом величины, получаем:
![]()
![]() ; (1)
; (1)
где S обозначает суммирование по всем звеньям тела;m - масса звена;V- скорость центра тяжести звена;Iik - компоненты тензора моментов инерции относительно осей i, kлокальной системы координат с началом в центре тяжести звена;Wi, Wk- проекции угловых скоростей звена по тем же осям,g - гравитационное ускорение,Н - высота центра тяжести звена над некоторым гравитационным уровнем.
Первые два члена определяют компоненты кинетической энергии в зависимости от перемещений и поворотов, а третий член - потенциальную энергию.
В уравнении (1) фигурируют движения, которые совершаются при помощи сил мышц в связи с трудовыми процессами: при перемещении предметов в пространстве или при некоторых ручных операциях и т.д. Положение тела можно определить при помощи уравнений Лагранжа второго рода, имеющих вид:
 (2)
(2)
где “n”, как и прежде, число степеней свободы. Первые три уравнения содержат в правой части проекции активных и реактивных сил. Следующие (n - 3) уравнений содержат моменты реактивных сил и сил в суставах относительно осей при поворотах на уголai .В левых частях уравнения (2) представлены кинематические характеристики, динамические константы (размеры тела), массы звеньев и инерционным моменты.
При помощи системы уравнений (2) устанавливается связь между кинематическими и силовыми характеристиками движения живого организма. Эта связь очень сложна, поскольку не всегда нервное возбуждение мышцы, которое увеличивает его тягу, приводит к повороту сустава в направлении действия этой силы.
Примеры: 1) кисть имеет две степени свободы;
2) локтевом суставе - 1 степень свободы;
3) сочленение между плечевой и локтевой и между локтевой и лучевой костями относятся к типу суставов, допускающих только одну степень свободы. Таким образом, предплечье обладает двумя степенями свободы движения относительно плеча;
4) тазобедренный сустав относится к типу шаровидных суставов, допускающих три степени свободы.
Сочленения и рычаги в опорно-двигательном аппарате человека.
Опорно-двигательный аппарат человека состоит из сочлененных между собой костей скелета, к которым в определенных точках прикрепляются мышцы. Кости скелета действуют как рычаги, которые имеют точку опоры в сочленениях и приводятся в движение силой тяги, возникающей при сокращении мышц.
Рычагомназывается твердое тело, которое может вращаться около неподвижной оси. Различают три вида рычагов:
Когда точка опоры лежит между точками приложения действующей силы F и силы сопротивления R.
О
а



F b

R

Условие равновесия рычага Fа = Rb.
Пример: череп, рассматриваемый в сагиттальной плоскости. (Сагиттальный - расположенный в переднезаднем направлении. Сагиттальные плоскости (мнимые) проходят вертикально спереди назад вдоль тела; только срединная сагиттальная плоскость делит его на две симметричные половины). Ось вращения О проходит через сочленение черепа с первым позвонком.R - сила тяжести головы, приложенная в центре тяжести. F- сила тяги мышц и связок, прикрепленных к затылочной кости.
Когда точка опоры лежит за точкой приложения силы сопротивления R, а силаFприложена на конце рычага.
F a O
b


R
Условие равновесия рычага Fa = Rb, ноа > b, следовательно,F > R, то есть рычаг дает выигрыш в силе, но проигрыш в перемеще-
нии и называется рычагом силы.
Пример: действие свода стопы при подъёме на полупальцы. ОпоройОслужат головки плюсневых костей.R- сила тяжести всего тела, приложена к торанной кости.F - мышечная сила, осуществляющая подъём тела, передается через ахиллово сухожилие и приложена к выступу пяточной кости.
Когда сила Fприложена ближе к точке опоры, чем силаR.
F
a a

O
R b


Условие
равновесия рычага
 .Fa=Rb,ноа < b,
следовательно,F > R, то есть рычаг
дает проигрыш в силе, но выигрыш в
перемещении и называетсярычагом
скорости.
.Fa=Rb,ноа < b,
следовательно,F > R, то есть рычаг
дает проигрыш в силе, но выигрыш в
перемещении и называетсярычагом
скорости.
Пример: кости предплечья. Точка опоры Онаходится в локтевом суставе.F- сила мышц, сгибающих предплечье,R- сила тяжести поддерживаемого груза, приложенная обычно к кисти, а также сила тяжести самого предплечья.
 ,
,
то есть мышечная сила F, необходимая для преодоления данной силыRсопротивления, должна быть тем больше, чем под мышечным углом к оси рычага она направлена. Поэтому, например, человек удерживает относительно большой груз при согнутом предплечье и значительно меньший - при разогнутом.
F sina F


a

R b O




a

Кости опорно-двигательного аппарата соединяются между собой в сочленениях или суставах.
Основной механической характеристикой сустава является число степеней свободы. Различают суставы с 1, 2 и 3 степенями свободы.
Примеры: плечево-локтевой сустав - одна степень свободы;
лучезапястный сустав - две степени свободы;
тазобедренный сустав, лопаточно-плечевое сочленение - три степени свободы (сгибание и разгибание, приведение и отведение, вращение).
Эргометрия.
Механические свойства тканей организма.
Человек с помощью мышц совершает механическую работу, которая обусловлена силой мышц и развиваемой ими мощностью. Средняя мощность, развиваемая человеком, не занятым специально физическим трудом, весьма невелика и, например, при ходьбе по ровной местности составляет 100-200 вт в зависимости от скорости.
Усталость свидетельствует о том, что мышцы совершают работу, хотя перемещения нет и работа равна нулю. Такую работу называют статической работой мышц.
Исследование работоспособности мышц называется эргометрией, а соответствующие приборы -эргомерами.
Пример: тормозной велосипед (велоэргометр). F- сила трения между лентой и ободом колеса, измеряемая динамометром. Вся работа испытуемого затрачивается на преодоление силы трения.
Тогда A = Fтр × l = Fтр × 2p r - за один оборот,
A = n × Fтр × 2p r - за nоборотов,
![]() - средняя мощность.
- средняя мощность.
Когда мышцы совершают работу, в них освобождается химическая энергия, накопленная в процессе метаболизма; она частично превращается в механическую работу, а частично теряется в виде тепла.
Во время работы используемых на велоэргометре можно рассчитать к.п.д. превращения химической энергии в механическую. КПД варьирует в зависимости от скорости вращения педалей и достигает максимальной величины - 22% - при нажимании ногой на педаль через каждые 0,9 (то есть при одном обороте педалей за 1,8 с). С помощью велоэргометра можно измерить не только к.п.д. мускулатуры ног, но и максимальную мощность, которую она способна развить - эта мощность достигает 40 Вт на 1 кг мышечной ткани. На таком уровне она может оставаться лишь короткое время, так как мышцы не могут получать кислород с необходимой для этого скоростью.
Заключение
Мы рассмотрели биомеханические закономерности, являющимися основанием, функционирования опорно-двигательной системы организма, процессов деформации тканей и клеток, распространения волн упругой деформации, сокращения и расслабления мышц, конвекционное движение биологических жидкостей и легочного газа.
|
№ |
Pi=mg |
xi |
|
|
|
|
|
|
п/п | |||||||
|
1 |
0.25 |
|
|
SXср=(SQR∑(Xi-Xср)2)∙ ∙1/n(n-1) |
ΔXсл=tα,п∙ SXср |
|
|
|
2 |
0.5 |
|
| ||||
|
3 |
0.75 |
|
| ||||
|
4 |
1.0 |
|
| ||||
|
5 |
1.25 |
|
| ||||
|
|
|
|
|
|
|
| |