

Виробництва ват “зЭиМ” (Росія)
Основними характеристиками механізму є номінальний обертаючий момент на вихідному валу; час одного обороту вихідного вала; інерційність, що повинна бути незначною, щоб забезпечити відпрацьовування керуючих імпульсів тривалістю 0,2-0,3 с.
Механізм електричний багатооборотний використовується для привода регулюючого органа в системах дистанційного й автоматичного управління (рисунок 6.12). Механізми оснащені редуктором 2, муфтою граничного моменту 3, механічними гальмами і ручним приводом 4, кінцевими вимикачами, перетворювачами положення і зворотного зв'язку. В якості приводного електродвигуна 1 використовуються трифазні асинхронні електродвигуни напругою 220/380 В. Умови експлуатації: температура від мінус 30 до плюс 50оС, відносна вологість до 80 %.

Рисунок 6.12 – Багатооборотний ЕВМ типу МЭМ-100 виробництва ВАТ “ЗЭиМ” (Росія)
Показник обертального моменту на вихідному валу багатооборотних ЕВМ лежить в межах від 6,3 до160 Н∙м. Номінальний час повного ходу вихідного вала – від 7,5 до 400 с. Частота обертання вихідного вала – від 9,4 до 48 об/хв. Номінальний повний хід вихідного вала – від 6 до 200 оборотів.
ЕВМ оснащуються одним з видів блоків сигналізації положення вихідного вала: реостатним, індуктивним, струмовим, блоком кінцевих вимикачів.
На рисунку 6.13 наведена спрощена електрична функціональна схема блоку зворотного зв’язку на основі реостатного датчика та блоку кінцевих вимикачів, що вбудовані в ЕВМ. Електродвигун через редуктор обертає вихідний вал, який механічно з’єднаний з РО. Кутові переміщення цього валу приводять до переміщень повзунка реостатного датчика, який живиться стабільною напругою постійного струму плюс 10 В. В результаті на виході формується сигнал зворотного зв’язку “Х” в діапазоні від 0 до плюс 10 В за номінальний повний хід вихідного валу. Крім того, на початку та в кінці номінального повного ходу вала спрацьовує або кінцевий вимикач КL, або кінцевий вимикач КН, механічно зв’язані з валом. Це призводить до формування або сигналу “ХL” , або сигналу “ХН” про досягнення відповідних крайніх положень. Сигнали “Х”, “ХL” та “ХН” можуть використовуватися як вбудованим пристроєм управління виконавчим пристроєм (позиціонером), так і зовнішнім, наприклад ПК чи контролером.

Рисунок 6.13 – Спрощена функціональна схема блоку зворотного
зв’язку та кінцевих вимикачів ЕВМ
Для управління ЕВМ від КСУ необхідно виконувати певне перетворення керуючих сигналів. Характер перетворення залежить від багатьох факторів: типу електродвигуна, типу регулюючого органу, типу джерела живлення ЕВМ. Однак основною складовою цього перетворення є посилення потужності керуючого сигналу, який є малопотужним і сам по собі не може привести до дії будь-який електродвигун ЕВМ.
Крім зазначених вище трифазних асинхронних електродвигунів (ТФАД) в ЕВМ знайшли застосування електродвигуни постійного струму (ДПС), вентильні електродвигуни постійного струму (ВД), двофазні асинхронні двигуни (ДФАД), двофазні та трифазні синхронні електродвигуни (ТФСД, ДФСД) та крокові електродвигуни (КД).
Усі ці електродвигуни через редуктор та вихідну ланку ЕВМ можуть приводити до дії або запірні РО, або запірно-регулюючі РО. Перші працюють тільки в двох крайніх положеннях – закритому та відкритому. Тому перетворення керуючого сигналу від КСУ полягає в організації відповідних комутацій на вході електродвигуна – вмикання живлення, вимикання живлення, електричний реверс двигуна. На рисунку 6.14 показаний ПЗО, через який виводяться два керуючих сигнали – один на запірний ВП на основі ДПС, а другий – на запірний ВП на основі ТФАД. Керуючий сигнал в самому ВП поступає на блок управління СО, а потім на блок комутації SW. Блок комутації управляє підключенням джерел живлення (UЖ чи АВС) до вхідних обмоток електродвигунів (ДПС чи ТФАД), в результаті чого вони починають обертатися в тому чи іншому напрямку, або зупиняються. Блок управління відслідковує моменти досягнення крайніх положень за сигналами “ХL” та “ХН”, щоб своєчасно відключити електродвигуни від живлення.

Рисунок 6.14 – Схеми перетворення керуючих сигналів ЕВМ
для запірних РО
На відміну від запірних РО, запірно-регулюючі РО вимагають точного переміщення вихідної ланки ЕВМ в будь-яке задане положення в межах номінального повного ходу. Таке точне переміщення називається позиціюванням, а виконавчий механізм що його здійснює – виконавчим механізмом позиціювння. Його конструкція найбільш складна і передбачає обов’язкову наявність спеціального керуючого пристрою – позиціонера, який управляє електродвигуном на основі інформації, що отримує від керуючого комп’ютера, блоку зворотного зв’язку та блоку кінцевих вимикачів. Для точного позиціювання ЕВМ на основі аналогових електродвигунів (постійного струму, вентильних, асинхронних та синхронних) схема позиціонера будується у вигляді багатоконтурної системи регулювання переміщень вихідної ланки ВП (рисунок 6.15). Основний контур регулювання переміщень вихідної ланки ВП містить регулятор переміщень РП та датчик переміщень ДП. Завданням для цього контуру є керуючий сигнал, що виводиться з комп’ютера через ПЗО. Вихід РП є сигналом завдання для контуру регулювання швидкості обертання вала електродвигуна ЕД (контур містить регулятор швидкості РШ та датчик швидкості ДШ). Вихід РШ є сигналом завдання для контуру регулювання струму ЕД (контур містить регулятор струму РС та датчик струму ДС). Вихід ДС управляє силовим перетворювачем СП, який, в свою

Рисунок 6.15 – Структурна схема ЕВМ позиціювання для
запірно-регулюючого РО
чергу, управляє потоком енергії від мережі живлення на ЕД, причому форма енергії на виході СП може не співпадати з її формою в мережі (про роботу СП мова піде нижче). Електродвигун через редуктор Р приводить до дії регулюючий орган РО. Положення цього органу задається керуючим сигналом на вході позиціонера (від ПЗО) і вимірюється ДП по положенню вихідної ланки ЕВМ. Застосування такої системи регулювання дозволяє шляхом формування оптимальних траєкторій розгону і зупинки ЕД виконувати точні і швидкі позиціювання вихідної ланки ВМ.
Крім аналогових ЕД в ЕВМ стали широко застосовуватися КД. Кожна зміна кута повороту ротора КД — це реакція крокового двигуна на вхідний керуючий імпульс. Оскільки кожен крок двигуна відповідає визначеному куту повороту ротора, а рух суворо заданий керуючими імпульсами, то керувати позиціюванням і швидкістю обертання дуже просто. Це, однак, справедливо при допущенні, що жоден крок не був пропущений, тобто положення ротора цілком визначено вхідними імпульсами. У цьому випадку немає необхідності в зворотному зв'язку по переміщенню вихідної ланки ВМ. Крім того, контури регулювання по швидкості і струму в таких ЕВМ зазвичай відсутні (див. рис. 6.15). Але в умовах перехідного процесу при моменті навантаження, близькому до номінального, частина керуючих імпульсів може бути пропущена. Якщо кроковому двигуну приходиться працювати в таких умовах, то в позиціонері необхідно передбачати контур зворотного зв'язку по переміщенню для компенсації помилок. Зазвичай в промислових ВП на основі КД такий контур точного регулювання переміщень вихідної ланки обов’язково присутній в позиціонері ЕВМ.
Тепер що стосується особливостей використання силових перетворювачів в електричних ВМ. При їх виборі враховується не тільки тип ЕД, але і форма напруги живлення в мережі. Якщо ЕВМ побудований на основі ДПС чи АД, а мережа живлення постійного струму, то в якості СП найчастіше використовуються ШІП – широтно-імпульсні перетворювачі (тиристорні чи транзисторні). У цьому випадку вихідна напруга СП переключається між двома постійними значеннями з високою частотою (в діапазоні кількох кілогерців). Середній рівень напруги підтримується зміною (модуляцією) ширини імпульсів. На рисунку 6.16 наведений приклад такого сигналу. "Вузькі" імпульси відповідають низькій, а "широкі" — високій середній напрузі. У перетворювачах для потужностей порядку 300 кВт використовуються так називані біполярні транзистори з ізольованим затвором (Insulated Gate Bipolar Transistors — ІGBT). Для великих рівнів потужності доцільно застосовувати тиристори, що замикаються (Gate Turn Off thyristors - GTO thyristors).

Рисунок 6.16 – Утворення середньої напруги живлення ЕД з сигналу
ШІП (а - для ЕД змінного струму; б – для двигуна постійного струму)
Технологія ШІП використовується в тих випадках, коли звичайний підсилювач просто згорить через високий рівень потужності. Імпульсне переключення призводять до того, що напівпровідникові прилади завантажені повною потужністю лише короткий час і, відповідно, розсіювання потужності в них мале, тому виходить, що ШІП мають високу ефективність. Додатковою перевагою ШІП є можливість безпосереднього управління переключеннями через цифровий вихідний порт комп'ютера,
ШІП широко використовуються в техніці виконавчих механізмів безупинної дії, таких як двигуни змінного і постійного струмів. Якщо частота переключень ШІП досить висока в порівнянні зі сталою часу ВМ, то результуючий сигнал має деяке середнє значення UСР (див. рис. 6.16). Для формування напруги живлення електродвигунів змінного струму треба, щоб напруга ШІП переключалась між трьома значеннями (нуль, позитивний максимум і негативний мінімум). Тоді UСР буде двополярною, а в ідеальному випадку – синусоїдальною. Для живлення ДПС треба, щоб сигнал ШІП переключався між двома значеннями – нуль та позитивний максимум, або нуль і негативний максимум. В першому випадку UСР буде мати додатній знак (двигун обертається в одному напрямку), а у другому – від’ємний знак (обертання двигуна у протилежному напрямку). Регулювання швидкості ЕД, а відповідно і переміщень вихідної ланки ВМ, здійснюється шляхом зміни тривалості імпульсів (їх ширини), що призводить до зміни UСР. Якщо змінювати частоту імпульсів, то буде змінюватися частота синусоїди UСР (див. рис. 6.16, а). Таке управління називається частотним і застосовується тільки в ЕВМ на основі електродвигунів змінного струму.
Якщо мережа живлення буде змінного струму, а ВП побудований на ДПС, то часто застосовують СП у вигляді керованих тиристорних випрямлячів. Такими пристроями легко керувати від комп’ютера чи контролера, бо вихідна напруга випрямляча змінюється шляхом зміни моменту подачі імпульсів на керуючі електроди тиристорів.
6.4 Управління виконавчими пристроями запірної дії
Як вже зазначалось вище, ці ВП працюють лише в двох крайніх станах РО – “повністю відкритий” або “повністю закритий”. Відповідно і виконавчий механізм цього ВП повинен відпрацьовувати лише ці два положення вихідної ланки (штока, важеля, вала). Говорять, що такий ВМ є двопозиційним.
Двопозиційні ВМ бувають з одним чи з двома стійкими станами. ВМ з одним стійким станом, якому відповідає відключення живлення, керується тільки одним сигналом. Прикладом пристрою такого типу є електродвигун з дистанційним контактором. Поки на контактор приходить керуючий сигнал від комп’ютера, двигун одержує живлення, але як тільки сигнал пропадає, живлення виключається і вихідна ланка ВМ під дією, наприклад пружини, повертається до вихідного стану.
Пристрій із двома стійкими станами зберігає свій поточний стан доти, поки не одержить новий керуючий сигнал, що змінює його. Можна сказати, що ВМ "пам'ятає" своє останнє положення. Наприклад, щоб надати руху поршневому ВМ, що керується магнітним клапаном із двома стійкими положеннями, необхідний один сигнал для відкриття й інший сигнал для закриття ВП. Виконавчі механізми з двома стійкими станами керуються імпульсними, а не аналоговими сигналами, тобто їх легше вбудовувати в контури управління КСУ.
Розглянемо приклад такої КСУ, яка здійснює управління хімічним реактором (рис. 6.17).

Рисунок 6.17 – Технологічна схема хімічного реактора
Робота хімічного реактора підпорядковується жорсткій послідовності технологічних операцій (вихідний стан характеризується зачиненими клапанами A, B, G, X, O і пустою ємністю реактора та пустою зовнішньою порожнечею): відкривається клапан А і починається наповнення реактору реагентом; виконується контроль рівня реагенту А за допомогою датчика рівня А і в разі досягнення заданого рівня клапан А закривається; відчиняється клапан В і в ємність реактору починає поступати реагент В, рівень якого контролюється датчиком рівня В; при досягненні заданого рівня реагенту В датчик В формує сигнал, за яким клапан В закривається; відкривається клапан G подачі гарячої води до зовнішньої порожнечі ректору та вмикається змішувач; температура суміші поступово піднімається, а її величина контролюється датчиком температури; при досягненні заданої температури клапан G закривається, змішувач відключається, а клапан Х подачі холодної води відкривається; по мірі охолодження суміші температура досягає нижньої границі і за сигналом датчика температури подача холодної води припиняється – клапан Х закривається; відкривається випускний клапан О і суміш виливається з реактору; після випуску усієї готової суміші клапан Х закривається і реактор переходить до вихідного стану.
З опису технологічного процесу видно, що усі РО системи управління повинні бути двопозиційними, тому їх називають клапанами.
Застосуємо для управління РО електричні виконавчі механізми (ЕВМ). Керування цими механізмами можна здійснити за допомогою реверсивних пускачів, наприклад типу ПБР-2М, що випускаються фірмою "ЗЭиМ" (Росія). В таблиці 6.1 наведені його основні параметри.
Таблиця 6.1 - Основні параметри пускачів типу ПБР-2М
|
Вхідний сигнал, В |
24 |
|
Вхідний опір пускача, Ом |
750 |
|
Максимальний струм, що комутується, А |
4 |
|
Швидкодія (час запізнювання вихідного струму при подачі і знятті керуючого сигналу, мс |
25 |
|
Різниця між тривалістю вхідного і вихідного сигналів не більше, мс |
20 |
|
Напруга джерела живлення ланцюгів керування, В |
22÷26 |
|
Норма середнього наробітку на відмовлення, годин |
200000 |
|
Повний термін служби , років |
10 |
|
Ступінь захисту |
IP-20 |
|
Електричне живлення, В; Гц |
220; 50 |
|
Споживана потужність, Вт |
7 |
|
Маса, кг |
4 |
Схема підключення цих пускачів до ПЗО, що виводить керуючі сигнали, та до двофазного асинхронного двигуна ЕВМ (ДФАД) приведена на рисунку 6.18. На рисунку позначено: КDO1 – контакти вихідного реле або ланцюг безконтактного ключового елементу (транзистора, тиристора тощо) каналу ПЗО виведення дискретного сигналу “обертання вправо”, КDO2 – відповідно “обертання вліво”. Пускач має вбудоване джерело живлення, завдяки якому утворюється вихідний струм каналу ПЗО “обертання вправо” чи каналу ПЗО “обертання вліво”, які проходять, відповідно, через вхідний опір пускача RВХ1 або RВХ2. Електронна схема пускача перетворює ці сигнали або у перемикання вихідного контакту КВИХ1, або вихідного контакту КВИХ2, які управляють способом підключення однієї з обмоток збудження ДФАД до мережі живлення 220 В. Якщо замикається один з контактів, то фаза живлення буде підключена до одної сторони обмотки (двигун обертається в одному напрямку), а якщо замикається другий контакт, то фаза підключається до другої сторони обмотки (двигун обертається в протилежному напрямку).

Рисунок 6.18 – Схема управління двопозиційним ЕВМ на основі
реверсивного пускача ПБР-2М
Для своєчасної зупинки двигуна при досягненні крайніх станів РО необхідно застосувати блок кінцевих вимикачів (див. рис. 6.13). Керуючий пристрій за їх сигналами зніме керуючий сигнал “обертання вправо” чи “обертання вліво”, що викличе повернення контактів КВИХ1 чи КВИХ2 у вихідний стан і зупинку двигуна.
Розглянемо у рамках цього прикладу програмну частину контуру управління одним з ВП хімічного реактора. Припустимо, що управління усім реактором здійснюється за допомогою промислового контролера типу SoftPLC (про ці та інші контролери мова піде у розділі 7). Це означає, що це РС-based контролер, який може програмуватися за допомогою засобів SCADA – системи, наприклад Trace Mode. У вбудованій FBD-мові цієї інструментальної системи є спеціальний алгоритмічний блок ZDV “Управління засувкою”. На рисунку 6.19 схематично показаний зв’язок програми управління та двопозиційного ВП через цей алгоритмічний блок.

Рисунок 6.19 – Зв’язок програми управління контролера з двопозиційним
ВП через FBD-блок ZDV “Управління засувкою”
Даний блок контролює значення двох дискретних сигналів: кінцевого вимикача відкриття РО і кінцевого вимикача закриття РО, які з блоку кінцевих вимикачів (БКВ) через ПЗО введення подаються на два входи алгоритмічного блоку ZDV (IOP – вхід вимикача відкривання, ICL – вхід вимикача закривання). Для управління ВП використовуються два дискретних сигнали: “OPN” - відкрити і “CLS” - закрити. Ці сигнали через ПЗО виведення поступають на реверсивний пускач ПБР-2м, який здійснює пуск, зупинку та реверс електродвигуна М виконавчого пристрою. Вхід CMD призначений для прийому команд від програми управління реактором. Такими командами можуть бути: “зупинити”, “відкрити” чи “закрити”. Вхід PT використовується для завдання часу відкриття/закриття ВП (у секундах). Його значення повинне бути трохи більше реального часу відкриття. Ця величина використовується для аналізу аварійних ситуацій, а також для управління ВП за часом у випадку несправності датчиків її стану. Вхід CSC призначений для встановлення спеціальних режимів роботи блоку ZDV.
На вихід Q%L виводиться положення засувки у вигляді відсотка закриття. Ця величина формується відношенням часу, що пройшов з подачі відповідної команди, до значення входу PT. Ця інформація може бути передана до комп’ютера з метою відображення стану ВП на мнемосхемі процесу. Вихід ALR призначений для контролю за загальним станом ВП. Молодший байт цього виходу передає статус стану засувки, а старший – ознаки аварійних станів. Ця інформація передається і до програми контролера, і до програми комп’ютера операторської станції.
Описаний вище електромагнітний пускач ПБР-2м має відносно низьку швидкодію - переключення вимагає порядку кількох десятків мілісекунд, замість мікросекунд для електронних пристроїв. Крім того, у реле, так само як і у механічних вимикачів, буває так називане деренчання контактів, що може викликати перешкоди, що у свою чергу впливає на вимірювальну апаратуру й електроніку комп'ютера.
Тому все частіше разом з ВП використовують перемикаючі напівпровідникові прилади (solid-state semiconductor), оскільки вони позбавлені багатьох недоліків реле. Такий вимикач має керуючий вхід, приєднаний до пристрою управління. Вони можуть приводитися в дію безпосередньо вихідними сигналами ланцюгів цифрової логіки, тому їх досить просто використовувати в комп'ютерному управлінні.
Розглянемо принцип дії та особливості використання таких пристроїв комутації на прикладі силових напівпровідникових реле фірми OMRON [ ]. Вони мають практично необмежений ресурс переключень, високу частоту спрацьовування (до 10 Гц), функції синхронізації вмикання з живильною мережею.
Усі силові напівпровідникові реле OMRON мають функцію синхронізації вмикання. Вона полягає в тому, що вмикання реле відбувається при нульовій вхідній напрузі, а вимикання - при нульовому струмі. Це дозволяє знизити рівень шуму при вмиканні навантаження й усунути перенапруги в індуктивному ланцюзі (рисунок 6.20).
Н аробіток
на відмовлення при дотриманні умов
експлуатації для напівпровідникових
реле OMRON складає 100 000 годин (більш 10
років) при необмеженому числі
переключень.
Для
продовження терміну життя реле не
рекомендується робота при дуже високих
і дуже низьких температурах, різких
коливаннях температури і тривалих
перевантажень.
аробіток
на відмовлення при дотриманні умов
експлуатації для напівпровідникових
реле OMRON складає 100 000 годин (більш 10
років) при необмеженому числі
переключень.
Для
продовження терміну життя реле не
рекомендується робота при дуже високих
і дуже низьких температурах, різких
коливаннях температури і тривалих
перевантажень.
Ф ункціональні
схеми внутрішньої побудови різних
моделей напівпровідникових реле
приведена на рисунку 6.21.
ункціональні
схеми внутрішньої побудови різних
моделей напівпровідникових реле
приведена на рисунку 6.21.
Рисунок 6.21 – Функціональні схеми різних моделей
напівпровідникових реле OMRON
Усі силові напівпровідникові реле OMRON мають:
- гальванічну розв'язку входу і виходу;
- світлодіодний індикатор стану;
- гвинтові термінали для підключення;
- убудований варистор для захисту від перенапруги.
В даний час OMRON випускає три серії силових реле:
G3NA – стандартні напівпровідникові реле; можливі різні варіанти вхідних ланцюгів, мається убудований індикатор стану;
G3PA – моноблочна конструкція з радіатором, компактний вузький корпус, замінний силовий елемент;
G3NH – потужне напівпровідникове реле, убудований радіатор, замінний силовий елемент.
При підключенні до напівпровідникового реле навантаження з великими пусковими струмами варто переконатися, що воно здатне витримати ці струми. У документації завжди указується величина максимального пікового струму (протягом одного періоду): реальні пікові струми повинні бути в 2 рази менші. Якщо можливе перевищення припустимого струму, то для захисту реле встановлюється швидкодіючий плавкий запобіжник.
П ри
навантаженні змінного струму частота
живильної мережі повинна бути 50 чи 60
Гц. Максимальна частота переключення
реле 10 Гц. Для захисту від перенапруги
реле мають вбудований варистор (рисунок
6.22).
ри
навантаженні змінного струму частота
живильної мережі повинна бути 50 чи 60
Гц. Максимальна частота переключення
реле 10 Гц. Для захисту від перенапруги
реле мають вбудований варистор (рисунок
6.22).
Д еякі
електромагніти виконавчих пристроїв
та регулювальні клапани оснащуються
вбудованим випрямлячем. У цьому випадку
струм має прямокутну форму, як показано
на рис.6.23. Для роботи в таких ланцюгах
застосовуються реле типу G3PA-_B-VD.
еякі
електромагніти виконавчих пристроїв
та регулювальні клапани оснащуються
вбудованим випрямлячем. У цьому випадку
струм має прямокутну форму, як показано
на рис.6.23. Для роботи в таких ланцюгах
застосовуються реле типу G3PA-_B-VD.
Напівпровідникові реле без функції вмикання при нулі (G3PA-_BL) нормально працюють у ланцюгах з однополуперіодним випрямлячем. Для реле з функцією синхронізації вмикання варто обмежити струм до 20 % від номінального і підключити шунтуючий резистор (рис. 6.24).

Рисунок 6.24 – Схема обмеження струму реле
У випадку малопотужного навантаження використовується шунтуючий резистор номіналом від 5 до 10 кОм (рис. 6.25).

Рисунок 6.25 – Схема підключення реле до малопотужного навантаження
При створенні реверсивного пускача для електродвигуна виконавчого пристрою робоча напруга реле повинне бути в 2 рази більша напруги мережі живлення (рис. 6.26). Час затримки перед реверсом повинне бути не меншою за 30 мс.

Рисунок 6.26 – Схема реверсивного пускача для електродвигуна ВП
Дані для вибору напівпровідникових реле OMRON приведені в таблиці 6.2.
Таблиця 6.2 – Технічні характеристики реле OMRON
|
Модель |
Вихідні характеристики |
Ціпь управліния |
Рекомендоване навантаження, кВт | ||||||
|
Максимальний струм навантаження, А |
Напруга навантаження, В |
Струм утікання (макс.), мА |
Напруга управління, В |
Вхідний опір/ струм |
Активна (нагревальна) |
Індуктивна |
3-фазний двигун | ||
|
~220B |
G3NA-205B |
5 |
~75 ... 264 |
10 |
-100 ... 120, -200 ... 240 або 5 ... 24 |
ЗбкОм, 72кОм, 7мА |
1 |
0.5 |
0,4 |
|
G3NA-210B |
10 |
_
|
-
|
-
|
-
|
2 |
1 |
0,75 | |
|
G3NA-220B |
20 |
|
|
|
|
3,5 |
2 |
1,5 | |
|
G3NA-240B |
40 |
|
|
|
|
7 |
4 |
2,2 | |
|
G3PA-210B-VD |
10 |
~75 ... 264 |
10 |
5. ..24 або -24 |
5мА |
2 |
1 |
0,75 | |
|
G3PA-220B-VD |
20 |
_
|
- |
-
|
-
|
3,5 |
2 |
1,5 | |
|
G3PA-240B-VD |
40 |
|
20 |
|
|
7 |
4 |
2,2 | |
|
G3PA-260B-VD |
60 |
|
- |
|
|
11 |
6 |
3,2 | |
|
G3NH-2075B |
75 |
~75...264 |
30 |
-100.. .240 або 5. ..24 |
41 кОм, 5 мА |
13 |
7,5 |
3,7 | |
|
G3NH-2150B |
ISO |
- |
- |
- |
_ |
26 |
15 |
7,5 | |
|
G3NA-410B |
10 |
~180.. .528 |
20 |
-100.. .240 або 5. ..24 |
72 кОм, 7мА |
3 |
2 |
1 | |
|
~380 B |
G3NA-420B |
20 |
|
|
|
|
6 |
3,5 |
2 |
|
G3NA-440B |
40 |
|
|
|
|
12 |
7 |
3 | |
|
G3РА-420В |
20 |
~180...528 |
20 |
S...24 |
5мА |
6 |
3,5 |
2 | |
|
G3PA-430B |
30 |
- |
- |
- |
- |
9 |
5 |
2,5 | |
|
G3PA-420B-VD |
20 |
~180...528 |
20 |
12.. .24 |
5мА |
6 |
3,5 |
2 | |
|
G3PA-430B-VD |
30 |
- |
- |
- |
- |
9 |
5 |
2,5 | |
|
G3NH-4075B |
75 |
~150...484 |
60 |
-100.. .240 або 5... 24 |
41 кОм, 5мА |
23 |
13 |
5 | |
|
G3NH-4150B |
150 |
- |
- |
- |
- |
46 |
26 |
10 | |
|
G3NA-D210B |
10 |
_5...200 |
5 |
-100... 240 або 5. ..24 |
- |
2 |
1 |
- | |
|
G3NA-D210B |
10 |
_5...200 |
5 |
-100... 240 або 5. ..24 |
- |
2 |
1 |
- | |
|
_200 В |
G3NA-D210B |
10 |
_5...200 |
5 |
-100... 240 або 5. ..24 |
- |
2 |
1 |
- |
П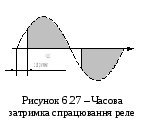 ри
наявності ємнісного навантаження
рекомендується вибирати реле з робочою
напругою в 2 рази більшою напруги в
мережі, тому що при його вимиканні
створюється сума напруг мережі і
конденсатора. Варто обмежувати струм
зарядки конденсатора до 50 % від припустимого
пікового струму в реле.
ри
наявності ємнісного навантаження
рекомендується вибирати реле з робочою
напругою в 2 рази більшою напруги в
мережі, тому що при його вимиканні
створюється сума напруг мережі і
конденсатора. Варто обмежувати струм
зарядки конденсатора до 50 % від припустимого
пікового струму в реле.
При низькій напрузі на виході реле відбувається затримка його спрацьовування: чим менша напруга, тим більше часова затримка (рис. 6.27). Як правило, це явище не викликає серйозних проблем при експлуатації напівпровідникових реле OMRON в системах промислової автоматики .
6.5 “Інтелектуальна” арматура – нове покоління ВП для КСУ ТП
Застосування поняття "інтелект" до будь-якого технічного засобу, у тому числі й до арматури, дуже умовно і визначається, як правило, наявністю закладеного в нього ПЗ. Поняття "інтелектуальна" визначається, по-перше, можливістю арматури керувати трубопровідними потоками рідких і газоподібних середовищ на основі команд, що надходять від контролера чи комп’ютера, які мають відповідні польові мережі і програмне забезпечення. По-друге, її можливістю постійного тестування свого власного стану. При цьому безупинно аналізується стан керованого об'єкта за заданими критеріями, вибираються оптимальні рішення по заданим програмою пріоритетам.
Основні області застосування "інтелектуальної" арматури відносяться, у першу чергу, до систем підвищеного ризику, надійності і живучості об'єкта. Така арматура здійснює оперативне діагностування ВМ та РО, передбачає їх відмовлення, мінімізує вплив людського фактора, підвищує ефективність резервування комунікацій. Підвищення ступеня інтелектуалізації арматури залежить напряму від застосування при її виробництві сучасних технологій в області мікроелектроніки і програмних засобів.
Прогноз на майбутній розвиток галузі арматуробудування з урахуванням новітніх відкриттів техніки мережних технологій можна представити в такий спосіб. Мікропроцесорні засоби контролю і управління ТП, аналізу стану системи і відпрацьовування команди по заданому алгоритму будуть переміщатися в самі РО чи ВМ. І уже від них уся необхідна й оброблена інформація буде передаватися на верхній рівень управління.
Розглянемо детальніше устрій та особливості застосування такого сучасного ВП на прикладі регулюючого клапана з пневматичним ВМ та електропневматичним інтелектуальним позиціонером типу ТZІD-С фірми АВВ [ ]. Зовнішній вигляді позиціонера наведений на рисунку 6.28.

Рисунок 6.28 – Загальний вигляд позиціонерів TZID-C
Функціональна схема позиціонера разом з його підключенням до пневматичного регулюючого клапана та до пристрою управління верхнього рівня показана на рис. 6.29.

Рисунок 6.29 – Функціональна схема позиціонера та схема його
підключення
В клапані вбудований індуктивний датчик переміщень “Н/U” штока пневматичного ВМ, сигнал якого через АЦП вводиться до мікроконтролера CPU позиціонера, що реалізує певний закон управління положенням РО. Керуючий сигнал, що виробляє мікроконтролер через ЦАП виводиться до електропневматичного перетворювача “І/Р”, який живить пневматичний ВМ. До складу позиціонера можуть входити такі модулі:
аналоговий модуль зворотного зв'язку по положенню рухомої системи клапана (2-проводний, 4...20 мА);
цифровий модуль зворотного зв'язку по граничних (максимальному і мінімальному) положеннях рухомої системи клапана;
модуль аварійного закриття клапана (у випадку припинення подачі живлення =24 В модуль незалежно від мікроконтролера забезпечує переведення клапана в безпечне положення (відкрите чи закрите) за рахунок скидання тиску в робочій порожнині);
аналоговий модуль зворотного зв'язку по положенню рухомої системи клапана (2-проводний, 4...20 мА) і цифровий модуль зворотного зв'язку по граничних (максимальному і мінімальному) положеннях рухомої системи клапана;
аналоговий модуль зворотного зв'язку по положенню рухомої системи клапана (живлення =48 В, 4...20 мА).
В ході роботи інтелектуальний позиціонер обмінюється інформацією з пристроєм управління верхнього рівня (контролером чи комп’ютером) через два інтерфейси – RS-232 або HART, в результаті чого вдається реалізувати такі нові функції ВП: перегляд, автоматичне настроювання, діагностика, конфігурування, моделювання та архівація.
У режимі "Перегляд" відбувається перегляд наступних параметрів клапана і позиціонера:
діапазон вхідного сигналу (може бути вибраний повний діапазон 4.. .20 мА чи частковий діапазон); .
статична характеристика "сигнал - хід затвора" (може бути вибрана лінійна характеристика чи характеристика рівного процентного відношення, а також спеціальна, побудована по 20 точкам);
вид дії (може бути обраний прямий чи зворотний хід, тобто зміні сигналу 4...20 мА може відповідати хід 0...100% чи хід 100...0%);
хід штока (чи кутове переміщення) може бути в разі потреби зменшений до 20 % у межах повного ходу 0... 100 %;
зона нечутливості (на заводі-виготовлювачі цей параметр настроюється на значення 0,3 %, надалі це значення може бути збільшено, наприклад для випадків дуже малих переміщень чи штока великих значень гістерезису рухомої системи клапана). Позиціонер може автоматично встановлювати значення зони нечутливості в режимі "автоматичне настроювання";
швидкість ходу (може бути досягнуто збільшення швидкості переміщення до моменту досягнення заданого значення ходу; швидкість встановлюється окремо для кожного напрямку переміщення);
граничний час відпрацьовування керуючого сигналу (якщо за цей часовий проміжок неузгодженість ходу не стане менше зони нечутливості, включається аварійна сигналізація);
неробоча зона переміщення штока (це функція викликає негайне закриття клапана при досягненні визначеного значення командного сигналу);
уставки кінцевих вимикачів;
цифровий вхід (за допомогою цифрового входу можна здійснити припинення чи обмеження доступу до діючої конфігурації, фіксацію клапана в цьому положенні чи перекидання його в одне з крайніх положень).
У режимі "Автоматичне настроювання" позиціонер, виконуючи оптимізацію форми перехідного процесу, установлює значення деяких параметрів, наприклад зони нечутливості.
У режимі "Діагностика" виконується вимір чи обчислення робочих характеристик клапана, що визначають його стан і, зокрема, необхідність ревізії чи ремонту. До таких параметрів відносяться:
число циклів спрацьовування;
сумарне переміщення штока;
гістерезис характеристики “сигнал-хід” (цей параметр визначає силу тертя в сальнику і направляючій втулці);
зусилля ущільнювального контакту в дросельній парі.
У режимі "Конфігурування" відбувається настроювання параметрів, характеристик і уставок, перерахованих вище для режиму "Перегляд".
У режимі "Моделювання" відбувається примусове завдання значень командного сигналу чи положення штока з метою, наприклад, перевірки датчика зворотного зв'язку чи уставок сигналізації. Можливо також формування стандартного збурювання по ходу клапана з метою перевірки перетворювачів (датчиків) і системи в цілому.
Таким чином, інтелектуальний клапан являється інтегрованою частиною АСУ, що формує і передає в загальне інформаційне поле дані про клапан, перетворювачі і систему в цілому. Застосування інтелектуальних ВП дозволяє одержати такі дані чи реалізувати такі функції, що у випадку використання клапанів з аналоговими позиціонерами зажадали б дорогого устаткування, ревізії клапана і позиціонера по місцю, а в ряді випадків - зняття клапана з трубопроводу.
Людина-оператор у зазначених вище режимах позиціонера може здійснювати взаємодію з ним такими способами:
за допомогою клавіатури і дисплея, розташованих на лицьовій панелі позиціонера (див. рис. 6.29);
через спеціальний ручний пристрій комунікації;
через сервісну програму Smart Vislon операторської станції і спеціальний LCI-адаптер;
через сервісну програму Smart Vislon операторської станції та HART-модем (рис. 6.30).

Рисунок 6.30 – Взаємодія з позиціонером через HART-модем
Звичайно існує різниця в ціні між аналоговими й інтелектуальними електропневматичними позиціонерами. Якщо порівняти аналоговий позиціонер типу TZIM тієї ж фірми з інтелектуальним позиціонером типу TZID-C, то базова ціна другого перевищує базову ціпу першого приблизно на 40%. Це, звичайно, дуже небагато, якщо врахувати ті численні додаткові можливості, що можуть бути реалізовані за рахунок застосування інтелектуальних ВП.
6.6 Мережні структури виконавчих пристроїв
Застосування цифрових технологій при створенні ВП змінило загальну концепцію управління технологічними процесами. Роль регулюючої й автоматизованої польової апаратури зростає, оскільки вона тепер здатна обмінюватися інформацією через мережні структури з промисловими засобами автоматизації будь-якого рівня (мережними контролерами, операторськими станціями тощо). У результаті ВП і контрольно-вимірювальні прилади стають усе більш важливим і активним інструментом в управлінні процесами, поліпшуючи технологічні й економічні показники функціонування КСУ ТП.
Розглянемо можливості, що надають інформаційні технології, зокрема технології мережного обміну інформацією, розробникам систем управління при застосуванні ними сучасної інтелектуальної арматури.
У попередньому підрозділі був розглянутий приклад подібної арматури, яка завдяки вбудованому мікропроцесорному контролеру здатна обмінюватися інформацією з іншими вузлами КСУ ТП через стандартну промислову мережу з протоколом HART. Коротко розглянемо особливості цього протоколу.
У середині 80-х років американська компанія Rosemount розробила протокол Highway Addressable Remote Transducer (HART) для передачі як аналогових (струм 4-20 мА), так і цифрових сигналів. На початку 90-х років протокол був доповнений і став відкритим комунікаційним стандартом [ ]. Спочатку він був нормований тільки для застосування в режимі з'єднання «точка-точка», потім з'явилася можливість застосовувати протокол у режимі багатоточкового з'єднання (режим “multidrop”). Основні технічні параметри, обумовлені стандартом на HART-протокол, представлені в таблиці 6.3.
Таблиця 6.3 – Технічні параметри HART-протоколу
|
Топологія |
"Точка - точка" (стандартна) чи шина |
|
Максимальна кількість пристроїв |
Один підпорядкований пристрій і два ведучих пристрої (стандартний режим); 15 підпорядкованих пристроїв, 2 ведучих пристрої (багатоточковий режим з віддаленим живленням) |
|
Максимальна довжина лінії зв'язку |
3 км (стандарт); 100 м (багатоточковий режим) |
|
Тип лінії |
Екранована кручена пара |
|
Інтерфейс |
4-20 мА, струмова петля (аналоговий) |
|
Швидкість передачі |
1,2 Кбіт/с |
|
Метод звертання |
Polling (механізм опитування з унікальною адресацією кожного пристрою) |
|
Максимальна довжина пакета |
0-25 байтів |
|
Час циклу відновлення даних |
Біля 500 мс (у пакетному режимі- 330 мс) |
|
Надійність передачі даних |
1 помилка на 105 біт, контроль по парності кожного байта, байт контрольної суми для кожного пакета |
|
Можливість використання в вибухонебезпечній зоні |
Так |
HART-протокол
використовується в двох режимах
підключення. У більшості випадків
застосовується з'єднання «точка-точка»
(рис. 6.31), тобто безпосереднє з'єднання
приладу низової автоматики (перетворювача
і нформації,
датчика, виконавчого пристрою і т.п.) і
не більш ніж двох ведучих пристроїв.
нформації,
датчика, виконавчого пристрою і т.п.) і
не більш ніж двох ведучих пристроїв.
У якості первинного ведучого пристрою, як правило, використовується ПЗО чи ПЛК, а в якості вторинного — портативний HART-термінал чи налагоджувальний ПК із відповідним модемом. При цьому аналоговий струмовий сигнал передається від веденого приладу до відповідного ведучого пристрою. Цифрові сигнали можуть прийматися чи передаватися як від ведучого, так і від веденого пристрою. Тому що цифровий сигнал накладений на аналоговий, процес передачі аналогового сигналу відбувається без переривання.
У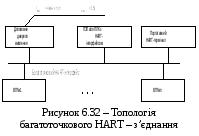 багатоточковому режимі (рис. 6.32) до 15
ведених пристроїв (slave) можуть з'єднуватися
паралельно двопровідною лінією з тими
ж двома ведучими пристроями (master). При
цьому по лінії здійснюється тільки
цифровий зв'язок. Сигнал постійного
струму 4 мА забезпечує допоміжне живлення
ведених приладів по сигнальних лініях.
багатоточковому режимі (рис. 6.32) до 15
ведених пристроїв (slave) можуть з'єднуватися
паралельно двопровідною лінією з тими
ж двома ведучими пристроями (master). При
цьому по лінії здійснюється тільки
цифровий зв'язок. Сигнал постійного
струму 4 мА забезпечує допоміжне живлення
ведених приладів по сигнальних лініях.
Типові HART-компоненти і схема їх підключення показані на рис. 6.33.
HART-протокол заснований на методі передачі даних за допомогою частотної модуляції (Frequency Shift Keying, FSK), відповідно до широко розповсюдженого комунікаційного стандарту Bell 202. Цифрова інформація передається частотами 1200 Гц (логічна “одиниця”) і 2200 Гц (логічний “нуль”), що накладаються на аналоговий струмовий сигнал (рис. 6.34).
Частотно-модульований сигнал є двополярним і при застосуванні відповідної фільтрації не впливає на основний аналоговий сигнал 4-20 мА. Швидкість передачі даних для HART складає 1,2 Кбіт/с. Кожен HART-компонент вимагає для цифрової передачі відповідного модему.

Рисунок 6.33 – Типові HART-компоненти і схема їх підключення

Рисунок 6.34 – Кодування HART-сигналу
Завдяки наявності двох ведучих пристроїв кожний з них може бути готовий до передачі через 270 мс (час чекання). Цикл відновлення даних повторюється 2-3 рази в секунду в режимі запит/відповідь і 3-4 рази в секунду в пакетному режимі. Незважаючи на відносно велику тривалість циклу, у більшості випадків він є достатнім для управління безупинними процесами.
Найважливішою умовою для передачі HART-сигналів є те, що навантаження в загальному ланцюзі комунікаційного каналу повинне бути в межах 230...1100 Ом. У противному випадку виникає невідповідність допустимим значенням параметрів сигналу. Для запобігання неприпустимого рівня перекручування HART-сигналу максимальне ослаблення сигналу HART-приладу повинне бути не більш 3 Дб на частоті 2500 Гц.
Для передачі HART-сигналу можуть застосовуватися будь-які двопровідні кабелі. У залежності від їхнього виконання і параметрів допускається різна довжина лінії. Представлені в табл. 6.4 значення довжини ліній відповідають звичайному з'єднанню «точка-точка».
Таблиця 6.4. Типова довжина ліній передачі HART-сигналу
|
Виконання двопровідної лінії |
Неекранована |
Екранована кручена, багатожильний провідник |
Екранована кручена, одножильний провідник |
|
Перетин провідника |
24AWG/0,2мм2 |
24AWG/0,2мм2
|
20AWG/0,5мм2 |
|
Довжина лінії |
"Коротка лінія" (довжина обмежена зовнішніми факторами) |
До 1500м |
До 3000 м |
При багатоточковому режимі роботи припустима довжина ліній буде значно меншою (табл. 6.5). Це пояснюється, у першу чергу, тим, що в даному випадку складаються паралельні ємності усіх підключених HART-приладів.
Таблиця 6.5. Типова довжина ліній передачі HART-сигналу в залежності
від погонної ємності кабелю та топології з’єднання
|
Топологія з’єднання |
Погонна ємність кабелю | ||
|
400 пФ/м |
200 пФ/м |
100 пФ/м. | |
|
"Точка-точка" |
600 м |
1100 м |
2000 м |
|
Багатоточкове: 10 HART-приладів, загальна ємність 5000 пФ |
500 м |
900 м |
1600 м |
|
Багатоточкове: 10 HART-приладів, загальна ємність 22000 пФ |
85 м |
150 м |
250 м |
HART-протокол реалізує рівні 1, 2 і 7 еталонної моделі ISO/OSI-стандарту (табл. 6.6). Додатково протокол передбачає надбудову до рівня 7 у формі HART Device Description Language. При реалізації рівня 1 HART-протокол спирається на добре відомий стандарт Bell 202. Таким чином, апаратно він орієнтований на так називані Bell- чи HART-модеми. На рівні 2 реалізується протокол передачі даних, що використовує принцип «ведучий-ведений» (master-slave). Ведучими можуть бути, наприклад, портативний HART-термінал чи ПЛК. Активний ведучий пристрій передає відповідну HART-команду на ведений HART-пристрій (як правило, прилади низової автоматики). Запитуваний HART-пристрій інтерпретує відповідну команду і відповідає. Обоє ведучих мають різні адреси, що і гарантує однозначність при обміні командами і відповідями. Передача даних відбувається асинхронно в напівдуплексному режимі.
Таблиця 6.6 – Рівні HART-протоколу
|
Рівень 8 – користувальницький |
DeviceDescription Language (DDL) |
|
Рівень 7 – прикладний |
HART-команди |
|
Рівень 2 – канальний |
HART-протокол Структура пакету |
|
Рівень 1 – фізичний |
Стандарт Bell 202 |
Структура пакетів у всіх режимах роботи однакова, що створює однозначну відповідність між HART-командами і відповідями пристроїв у багатоточковому режимі. Розходження існують тільки між структурою запиту ведучого ( HART-термінала чи ПЛК) і структурою відповіді ведених пристроїв (рис. 6.35, а, б).

PA — преамбула; SD — ознака старту; AD — адреса портативного HART & термінала; CD — НАRT & команда; ST — статус польового пристрою; BC — довжина поля статусу і даних; DT — поле даних; СНК — контрольна сума.
Рисунок 6.35 – Структура HART-телеграми: a – запит від ведучого
пристрою; б – відповідь від веденого пристрою; в –
формат байта
Усі HART-повідомлення передаються окремими байтами. Байт даних містить стартові і стопові біти, а також біт паритету (рис. 6.35, в). Надійність передачі даних по HART-протоколу забезпечується різними заходами контролю як на рівні байта, так і на рівні пакета. Частота виникнення помилки на рівні передачі бітів складає 1 помилку на 105біт. Кожен переданий байт усередині HART-пакета має біт паритету; кожен HART-пакет має контрольну суму, за допомогою якої можна розпізнавати до 3 помилкових бітів. Усередині рівня 7 протокол HART використовує команди, що підрозділяються на три основних класи : універсальні команди, стандартні команди та специфічні команди пристроїв.
Багато фірм-виробників HART-пристроїв пропонують спеціальне програмне забезпечення як для їх конфігурування, так і для їх вбудовування в систему управління. Воно дозволяє використовувати повною мірою можливості сучасних інтелектуальних ВП і датчиків, а також забезпечує їхнє зручне конфігурування і діагностику.
Р озглянемо
роботу такого ПЗ на прикладі інтелектуального
ВП з позиціонером ND-800 фірми “Метсо
Автомейшен” [ ].Система
управління роботою клапана і його
моніторингу складається з двох пакетів
ПЗ. Пакет Field Browser постійно відслідковує
стан клапана (рис. 6.36).
озглянемо
роботу такого ПЗ на прикладі інтелектуального
ВП з позиціонером ND-800 фірми “Метсо
Автомейшен” [ ].Система
управління роботою клапана і його
моніторингу складається з двох пакетів
ПЗ. Пакет Field Browser постійно відслідковує
стан клапана (рис. 6.36).
Рисунок 6.36 – Структура взаємодій через ПЗ Field Browser в процесі
технічного обслуговування інтелектуальних ВП
Коли Field Browser виявляє відхилення від заданих параметрів у ВП, відразу оповіщається обслуговуючий персонал. Установивши Field Browser і позиціонер ND 800, можна на час забути про ВП. Коли стан ВП буде близький до несправного чи погіршаться експлуатаційні характеристики, ПЗ автоматично сповістить персонал по електронній пошті або через коротке повідомлення на мобільний телефон. Можна використовувати будь-який Інтернет браузер для перевірки стану ВП на місцях. Протягом кількох секунд перевіряється стан майже тисячі ВП як у дистанційному режимі, так і на місці.
Для визначення ситуації можна використовувати також ПЗ Valve Manager, що працює в мережі HART через мультиплексор і є інженерною програмою для настроювання, діагностики і тестування ВП. Усі ці операції виконуються, коли ВП монтується, перевіряється на несправності чи ремонтується. За допомогою прямого зв'язку через HART можна настроювати ВП один за іншим із диспетчерського пункту чи будь-якого іншого місця, де маються електричні лінії 4-20 мА. Це найшвидший і безпечний спосіб роботи з ВП, розташованими у важкодоступних чи небезпечних місцях. Можна створити багатоточкову мережу HART і настроювати тисячі ВП з одного віддаленого місця. Настроювання ВП й автоматичне калібрування через Valve Manager займає усього кілька хвилин. Valve Manager дозволяє керувати всіма ВП на заводі, надаючи базу даних про стан процесу в часі, діагностичну інформацію, результати іспитів і інформацію про будь-які зміни в настроюваннях ВП за весь термін його експлуатації. Зібрані дані можна використовувати для складання точного графіка профілактичного обслуговування, максимально продовживши в такий спосіб термін безупинної роботи ВП.
Таким чином, завдяки цифровій системі передачі даних через мережу HART оперативна інформація, одержувана від інтелектуальних ВП, є значним активом у загальній ефективності КСУ ТП. Вона дозволяє зменшити витрати на обслуговування, уникнути позапланових зупинок процесу через аварійний ремонт устаткування і підвищити продуктивність об'єкта за рахунок збільшення об'єму інформації про контур регулювання і роботу ВП.