

4. 3. Теорема Котельникова-Шеннона

Безперервний сигнал х(t) з обмеженим частотним спектром в межах від 0 до Fс повністю визначається послідовністю своїх дискретних значень,
наступних
через інтервал переривання
![]() (або частоту переривання)
(або частоту переривання)
![]()
Суть теореми полягає в тому, що безперервний сигнал може бути відновлений після квантування в ІЕ без спотворення, якщо частота квантування в 2 рази або більше перевищує граничну частоту в спектрі безперервного сигналу.
{ Як відновити синусоїду заданого періоду Т по двох відліках заданих на інтервалі
[0,Т] ? Чи розв'язується ця задача завжди однозначно ?}

4.4. Динаміка ісау
4.4.1 Поняття про решітчаcті функції та різницеві рівняння
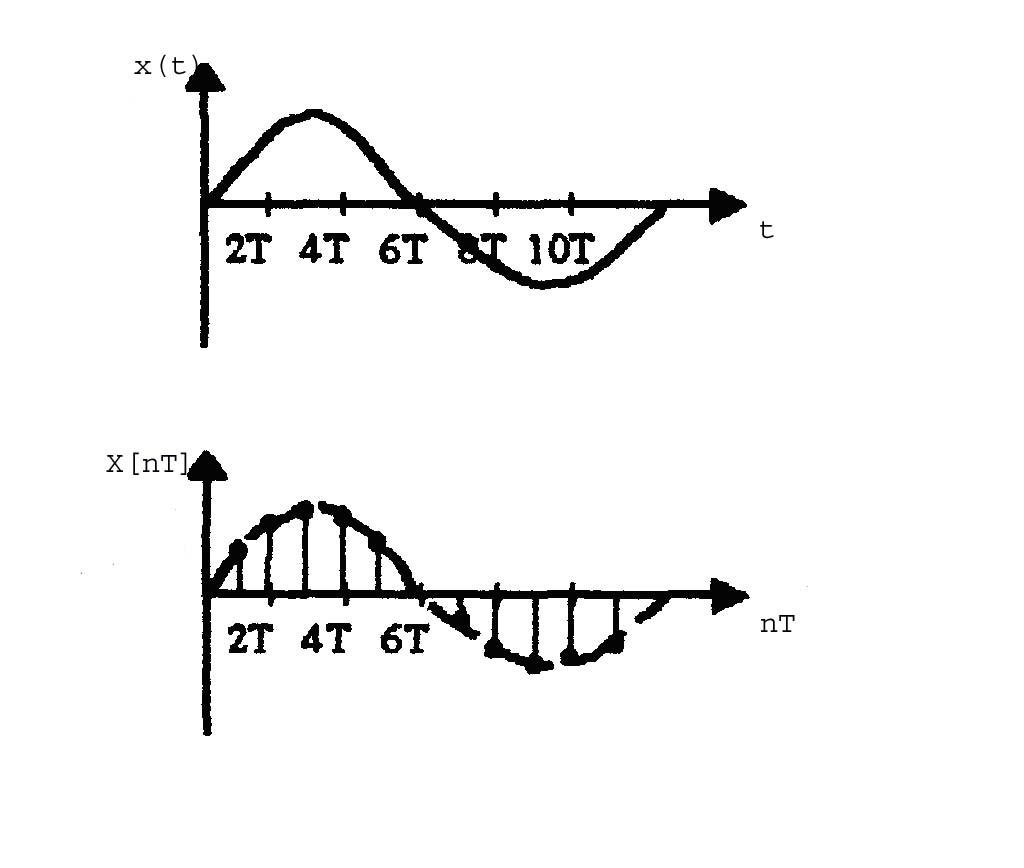
Якщо безперервний сигнал може бути представлений безперервною функцією часу, то сигнал на виході ІЕ може бути представленим тільки частиною значень безперервної функції. Ці значення розділені періодом квантування, а в середині періодів всі проміжні значення тільки нульові.
 Тому
дискретно представлені сигнали зручніше
описувати функціями дискретної, а не
безперервної змінної. Функцію, отриману
в результаті заміни безперервної змінної
дискретною незалежною змінною і визначену
в дискретні моменти часу nТ,(n+1)Т,...
називають решітчастою функцією.
Тому
дискретно представлені сигнали зручніше
описувати функціями дискретної, а не
безперервної змінної. Функцію, отриману
в результаті заміни безперервної змінної
дискретною незалежною змінною і визначену
в дискретні моменти часу nТ,(n+1)Т,...
називають решітчастою функцією.
На відміну від безперервної функції х(t) решітчасту функцію позначають як х[nТ]. Безперервна функція х(t) є огинаючою для своєї решітчастої функції х[nТ], але оскільки через дискретні точки решітчастої функції можна провести безліч огинаючих, то не існує зворотної однозначної відповідності між решітчастою функцією та її безперервною функцією. Ця обставина не дозволяє вважати решітчасту функцію повним аналогом безперервної функції.
Поняття решітчастої функції лежить в основі спеціалізованого апарату опису декретних систем і дозволяє здійснювати перехід до дискретного аналогу диференціальних рівнянь - різницевих рівнянь.
4.4.2.Приклад: Використання цом в якості регулятора. Редукція до безперервної сау.
Коли з'являються нові можливості, новий клас систем, то звичайно пробують застосувати ці можливості в рамках старих систем, синтезувати нові системи старими методами, звести (редуцюювати) до старих освоєних систем.
Згадайте перші автомобілі - карети з мотором, перші електродвигуни - пристрої типу парової машини з соленоїдом замість циліндра.
В методологічному аспекті даний приклад відноситься саме до такого класу підходів.
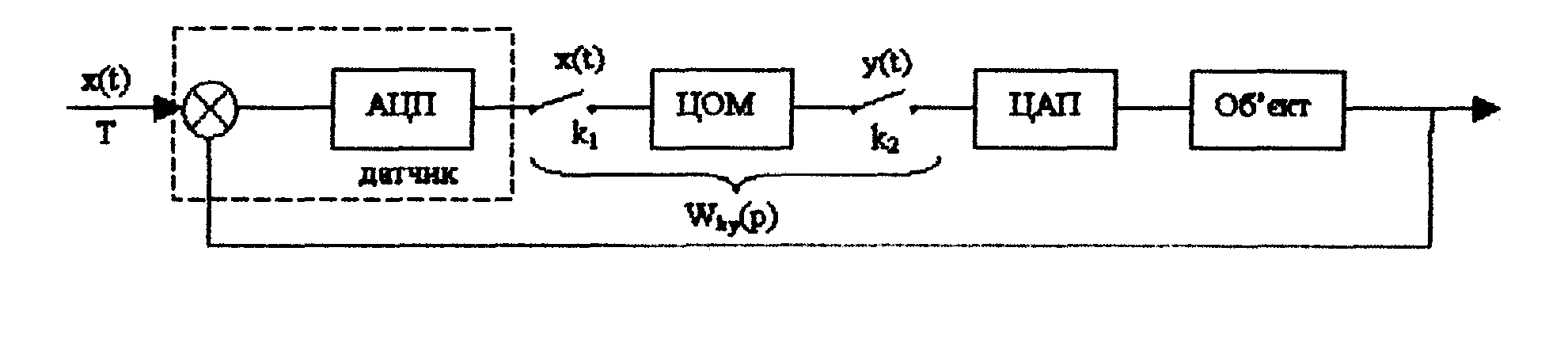
Розглянемо принципи реалізації безперервного регулятора за допомогою імпульсного пристрою ЦОМ.
Припустимо, що для безперервної системи вирішена задача синтезу і отримана передаточна функція регулятора:
![]()
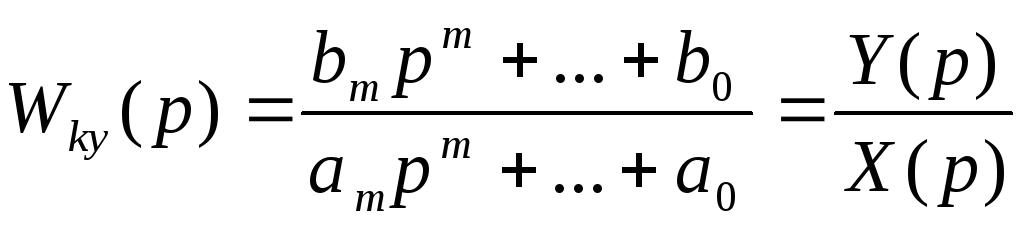
При умові, що частота квантування 1/Т в багато раз більше власних частот лінійної частини, дана функція може бути реалізована за допомогою ЦОМ. З врахуванням припущення про незначимість Т можливо похідні замінити кінцевими різницями, тобто:
Запишемо диференційне рівняння, яке відповідає Wр: (обер. перетв. Лапласа)
![]()
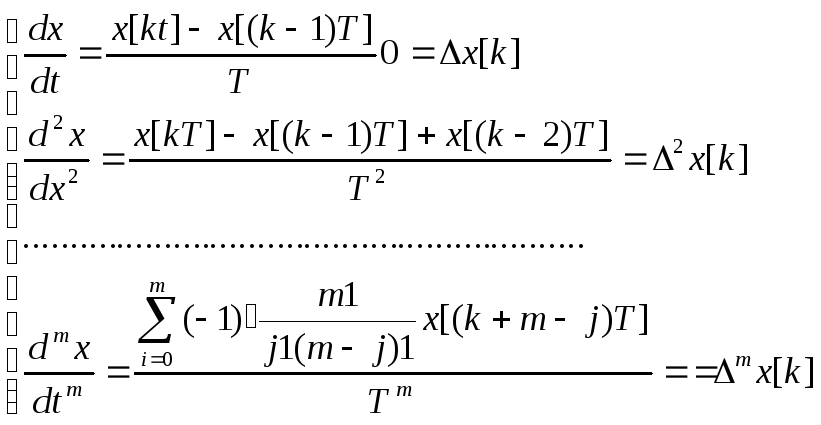
Замінено похідні кінцевими різницями і врахуємо зв'язок останніх з дискретами решітчастої функції:
![]()
Вирішимо рівняння відносно поточного виходу:
![]() -
-
алгоритм роботи управляючої ЦОМ.
Таким чином для реалізації Wky необхідно зберігати в пам'яті m попередніх значень входу та n попередніх значень виходу.
Отже, ми роздивилися приклад використання ЦОМ в якості регулятора, зробивши припущення про те, що внаслідок малості кроку квантуваня по часу Т, безперервні частини САУ "не помічають" дискретності роботи регулятора. Теоретичним фундаментом для цього підходу є теорема Котельникова-Шеннона:
Якщо безперервна частина САУ має обмежений зверху спектр (частотну
характеристику), то існує кінцева частота квантування, при якій не
відбувається втрат інформації в ЦОМ.
? Чи обмежена область застосування ІСАУ тільки такою, основаною на ?
теоремі Котельникова-Шеннона, заміною безперервних систем ?
З досвіду управління складними нелінійними об'єктами відомо, що можливо так підібрати період і величину імпульсних впливів (так узгодити їх з динамікою об'єкта), що САУ буде нормально функціонувати. Однак при цьому виявляється, що у ІСАУ в цьому випадку можуть бути властивості (як "добрі" так і "погані"), які не виводяться з властивостей безперервних САУ.
Наприклад: нехай виміряні значення виходу ІСАУ мають вигляд:


Чи стійка САУ?
Розглядання цього прикладу показує, що проблема стійкості ІСАУ має свої особливості в порівнянні з проблемою стійкості безперервних САУ.
Таким чином для вирішення задач аналізу і синтезу ІСАУ необхідний власний математичний апарат, бажано подібний до вже засвоєного математичного апарату безперервних САУ.