

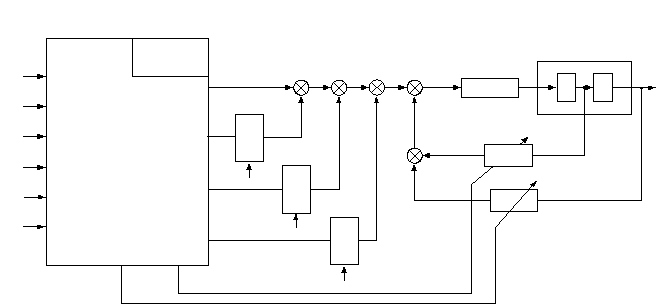
Структурна схема термінальної сау (для задачі зближення)

![]() -
змінні коефіцієнти, які встановлюються
кожен раз у відповідності знеобхідною
задачею.
-
змінні коефіцієнти, які встановлюються
кожен раз у відповідності знеобхідною
задачею.
Термінальне управління при застосуванні де-кількох паралельно працюючих виконавчих елементів (приводів)
Для сучасних об’єктів управління характерна надлишковість виконавчих пристроїв (приводів). Причини цієї надлишковості різноманітні: вимоги надійності та живучості, багаторежимність (коли для кожного режиму використовуються різні типи виконавчих пристроїв), неможливість повного розділення каналів. В САУ таких об’єктів виникає задача забезпечення паралельної роботи де-кількох виконавчих пристроїв.
? Наведіть приклад задачі узгодження виконавчих пристроїв.
(1.Рак, лебідь та щука. 2.Трійка коней. Відомо, що тяга 2 коней = 1,6 коня;
3-x коней = 2 коня; 10 коней = 3-4 коня)
Розглянемо більш сучасні приклади з техніки.
Вертикально злітаючий літак
|
|
1,2,3 – газотурбінні двигуни 4,5 – аеродинамічні керма 6,7 – газоструйні керма |

Для керування рухом такого літака використовуються спільно: газотурбінні двигуни, газоструйні керма, аеродинамічні керма. Надлишковість тут необхідна як для надійності, так і для забезпечення працездатності на різних режимах (аеродинамічні керма неефективні на малих швидкостях). Необхідно, щоб на всіх режимах – посадка, розгон, ... – ці виконавчі органи працювали узгоджено.
Скажіть, скільки різних м’язів беруть участь в де-якому певному ручі руки?
(приблиззно 10÷50).
2) Роботи – маніпулятори по багатьом причинам вимушені копіювати, наприклад, людську руку.
Розглянимо типову схему РМ (робота-маніпулятора).

Більшість РМ являють собою кінематичний ланцюг (поки з 2-3 ланцюгів, в майбутньому з 3-10).
Вочевидь, рух захвату складним нелінійним обращом ззалежить від обертальних рухів окремих ланцюгів.
Як керувати окремими ланцюгами, щоб їх рухи склались в цілеспрямований стійкий рух захвату?
Традиційними методами ТАУ таку задачу задачу кількості ланцюгів > 3 роз’язати неможливо. Як жеузгодити окремі приводи РМ ?
З’ясовується, що термінальне управління по вищій похідній дозволяє включати на паралльну роботу необмежену кількість виконавчих пристроїв. Причому, термінальна САУ виявляється нечутливою до нелінійності окремих виконавчих пристроїв і навіть відмов. Як це довести? В даному випадку при довільних нелінійностях для довдення може використовуватися моделювання перехідних процесів в системі, хоча можливо застосовувати і де-які аналітичні методи (метод функцій Ляпунова,...), однак тільки для вузьких класів нелінійностей.
Таким чином, для доведення використовується експеримент – модельний або натуральний.
Розглянимо схему термінальної САУ з паралельними виконавчими органами.

![]() - коефіцієнт
передачі (підсилення)
окремого
привода, обираємий в широких межах;
- коефіцієнт
передачі (підсилення)
окремого
привода, обираємий в широких межах;
![]() -
структурний елемент, який характеризує
нелінійності привода.
-
структурний елемент, який характеризує
нелінійності привода.
В якості
управляючого впливу (однакового для
всіх приводів !!!) використовується
![]() :
:
що в
підсумку забезпечує астатизм внутрішнього
контура
![]() .
.
При
використанні метода управління по вищій
похідній не вимагається здійснювати
узгодження паралельно працюючих
виконавчих елементів. Достатньо подати
на всі елементи один і той же управляючий
вплив
![]() .
.