

Розрахуємо загальну інтенсивність відмов, середній час напрацювання на відмову та ймовірність безвідмовної роботи для кожної функції аср за формулами (7.1) та (7.2).
 (7.4)
(7.4)
де n – кількість елементів у структурній схемі надійності;
i – інтенсивність відмов для i-го елементу схеми;
– загальна інтенсивність відмов.

![]() (7.5)
(7.5)
де Tсер – середнє напрацювання на відмову для схеми.
Розрахунок для інформаційної функції
а)Для інформаційної функції розрахуємо середнє напрацювання на відмову:
![]()
Розрахуємо ймовірність безвідмовної роботи по формулі:
P ( ) = e -= e -/Tсер (7.6)
де P – ймовірність безвідмовної роботи за час .
Приймаємо: = 720 годин (1 місяць);
![]()
б) Для інформаційної функції розрахуємо середнє напрацювання на відмову:
![]()
Розрахуємо ймовірність безвідмовної роботи по формулі:
P ( ) = e -= e -/Tсер
де P – ймовірність безвідмовної роботи за час .
Приймаємо: = 720 годин (1 місяць);
![]()
Розрахунок для керуючої функції
Для керуючої функції розрахуємо середнє напрацювання на відмову:
![]()
Ймовірність безвідмовної роботи:
![]()
Розраховуємо
ймовірність відновлення працездатності,
задавши середній час встановлення
працездатності
![]() та допустимий час функціонування об’єкту
при невиконанні керуючої функції
та допустимий час функціонування об’єкту
при невиконанні керуючої функції![]() :
:
![]()
Розрахуємо ймовірність безвідмовної роботи з урахуванням відновлення відмовляючої функції:
![]()
Розрахунок для захисної функції
Для захисної функції розрахуємо середнє напрацювання на відмову:
![]()
Ймовірність безвідмовної роботи:
![]()
Розрахуємо коефіцієнт готовності для захисної функції:
![]()
Ймовірність безвідмовної роботи при виконанні очікуваної задачі:

![]()
7.3. АСР температури перегріва пари з вводом похідної з проміжної точки
В даному дипломному проекті більш детально розглянемо АСР температури перегрітої пари. Каскадні системи застосовуються для об'єктів з великою інерційністю по каналу регулювання . Якість регулювання можна поліпшити введенням додаткового контуру стабілізації допоміжної змінної.
Розглянемо структуру каскадної АСР яка зображена на рис.


![]() ,
,![]() – передавальні функції об’єкта
по основні
– передавальні функції об’єкта
по основні![]() і додатковій
і додатковій![]() змінним;
змінним;
Рис. 7.5.Структурна схема каскадної АСР
У системі діють два регулятори - основний
регулятор![]() ,
служить для стабілізації основної
регульованої величини
,
служить для стабілізації основної
регульованої величини![]() та
та![]() - допоміжний регулятор , служить для
регулювання допоміжної величини
- допоміжний регулятор , служить для
регулювання допоміжної величини![]() .
При цьому основний регулятор впливає
на зміну завдання допоміжному регулятору.
.
При цьому основний регулятор впливає
на зміну завдання допоміжному регулятору.
Розрахунок каскадної АСР передбачає визначення налаштувань основного і допоміжного регуляторів. Розрахунок налаштувань регуляторів здійснюють зведенням багатоконтурної АСР до одноконтурної шляхом введення певних допущень.
Щоб розрахувати каскадну систему
потрібно знати
![]() ,
,![]() .
.
Тоді якщо
![]() внутрішній контур буде швидкодіючим,
отже розрахунок починаємо з головного
регулятора .Ми вважаємо всю частину
схеми еквівалентним об’єктом і отримуємо
звичайну одноконтурну систему.
внутрішній контур буде швидкодіючим,
отже розрахунок починаємо з головного
регулятора .Ми вважаємо всю частину
схеми еквівалентним об’єктом і отримуємо
звичайну одноконтурну систему.
 (7.7)
(7.7)
Тепер по
 знаходимо налаштування
знаходимо налаштування![]() -головного
регулятора.
-головного
регулятора.
Вони знаходяться будь-яким методом наприклад РАФХ, МАЧХ,інженерними.
Тепер нам потрібно перейти до розрахунку
![]() - допоміжного регулятора.
- допоміжного регулятора.
Головний регулятор у нас уже розрахований, нам потрібно знайти еквівалентний об’єкт для допоміжного регулятора
 (7.8)
(7.8)
Для цього еквівалентного об’єкту розраховуємо налаштування регулятору і
 проводимо
перевірку каскадної системи з отриманими
налаштуваннями головного та допоміжного
регуляторів моделюванням .
проводимо
перевірку каскадної системи з отриманими
налаштуваннями головного та допоміжного
регуляторів моделюванням .
Якщо ![]() тоді
починаємо розрахунок з допоміжного
регулятора.
тоді
починаємо розрахунок з допоміжного
регулятора.
В даній ситуації внутрішній контур потрібно зробити швидкодіючим для цього обирають П-руглятор не зважаючи на статичну помилку .
Розраховують
![]() по
по![]() будь-яким способом. Далі знаходять
еквівалентний об’єкт для
розрахунку налаштувань
будь-яким способом. Далі знаходять
еквівалентний об’єкт для
розрахунку налаштувань ![]() -головного
регулятора.
-головного
регулятора.
 (7.9)
(7.9)
Для цього еквівалентного об’єкту розраховуємо налаштування головного регулятору і проводимо перевірку каскадної системи з отриманими налаштуваннями головного та допоміжного регуляторів моделюванням .
Загальноприйнятою є схема регулювання перегріву температури пара з введенням похідної з проміжної точки. Регулятор перегріву отримує основний сигнал по відхиленню температури перегрітої пари на виході і додатковий- пропорційний похідній від температури пара в проміжній точці безпосередьньо за пароохолоджувачем.

ПО-пароохолоджувач Д-диференціатор РТ-регулятор тем-ри
Рис.7.6. Регулювання температури перегрітої пари

 Рис.7.7.
Структурна схема АСР з додатковим
сигналом з проміжної точки
Рис.7.7.
Структурна схема АСР з додатковим
сигналом з проміжної точки
Для такої АСР можна рекомендувати наступну послідовність розрахунку налаштувань.
Розрахунок налаштувань диференціатора,замінюючи внутрішній контур зі зворотним зв'язком, в якій є диференціатор, контуром з одиничним зворотнім зв'язком, робочу структурну схему (рис. 7.7) можна представити у вигляді структурної схеми, наведеної на рис. 7.8.
Ця схема принципово не відрізняється
від структурної схеми системи із
стабілізуючим і коригуючим регуляторами.
Однак, особливістю її є те, що коригувальний
регулятор в обов'язковому порядку
повинен бути ПІ - регулятором, в якому
роль коефіцієнта передачі грає![]() ,
а
,
а![]() – постійна часу диференціатора Тд.
– постійна часу диференціатора Тд.

![]() ;
;![]() ;
;![]()

Рис. 7.8 Перетворення в каскадну систему
Далі, вважаючи, що внутрішній контур значно менш інерційний в порівнянні з зовнішнім, розраховують настройку коригуючого ПІ - регулятора за передавальної функції еквівалентного об'єкта
![]() (7.11)
(7.11)
За знайденими налаштувань коригуючого ПІ - регулятора знаходять значення налаштування параметрів диференціатора
![]() ;
;![]() .
(7.12)
.
(7.12)
Вихідну структурну схему (рис. 7.7) перетворять до вигляду, зручного для розрахунку налаштувань регулятора (рис. 7.9).

Рис. 7.9 Перетворення вихідної структури для розрахунку головного регулятора
 Тоді
еквівалентний об'єкт, характеристики
якого повинні бути використані для
розрахунку налаштувань регулятора,
описується передавальною функцією
Тоді
еквівалентний об'єкт, характеристики
якого повинні бути використані для
розрахунку налаштувань регулятора,
описується передавальною функцією
![]() (7.13)
(7.13)
З літературних джерел:
Передавальна функція об’єкта управління:![]() .
.
Випереджуючий контур:![]()
За допомогою Matlab y середовищі Simulinkотримаємо перехідні характеристики. Для цього зберемо таку схему.


Рис. 7.10. Структурна схема отримання перехідних характеристик об’єкта управління та випереджуючого контуру

Рис. 7.11.Перехідна характеристика об’єкта управління

Рис. 7.12. Перехідна характеристика випереджуючого контуру
Так як, ![]() ,
,![]() (одного порядку) то скористаємося
методикою, відповідно до якої спочатку
розраховується внутрішній регулятор,
а потім - зовнішній. Розраховучи параметри
налаштування для внутрішнього регулятора
врахуємо,що
(одного порядку) то скористаємося
методикою, відповідно до якої спочатку
розраховується внутрішній регулятор,
а потім - зовнішній. Розраховучи параметри
налаштування для внутрішнього регулятора
врахуємо,що![]() ,
,![]() тому
нам потрібно зробити внутрішній контур
швидкодіючим. Для цього вибираємо
П-закон регулювання
тому
нам потрібно зробити внутрішній контур
швидкодіючим. Для цього вибираємо
П-закон регулювання
Зробимо синтез П-регулятора. Виконаємо
розрахунок параметрів з використанням
методу РАФХ. Виберемо перехідний процес
з ψ = 0,9 m = 0,365.![]() (7.14)
(7.14)

![]() ,
(7.15)
,
(7.15)
де
![]() ,
(7.16)
,
(7.16)
![]() (7.17)
(7.17)
Для побудови РАФХ скористаємося формулами для ПІ-регулятора:
Текст програми:
m=0.3665;
w=0.:0.0001:0.15;
W=(0.1*exp(-10*(-m*w+i*w)))./(55*(-m*w+i*w)+1);
Re=real(W);
Im=imag(W);
Kp=-(m*Im+Re)./(Im.^2+Re.^2);
Ki=-w*(m.^2+1).*Im./(Im.^2+Re.^2);
plot(Kp,Ki);
grid;
title('metod RAFH');
ylabel('Kp/Tu');
xlabel('Kp');

Рис. 7.13. Метод РАФХ для допоміжного регулятора
Для П- регулятора беремо точку на осі![]() ,
коли
,
коли![]() .
.![]()
Розрахуємо налаштування П-регулятоа за допомогою інженерного методу на процес з 20% перерегулюванням
Для П регулятора:
Промоделюємо замкнуту систему за допомогою Simulink для П-регулятора

Рис.7.14.Структурна схема

Отримуємо такі перехідні процеси по каналу «завдання-вихід» та
«збурення-вихід»

Рис. 7.15.Перехідні процеси по каналу «завдання-вихід»

Рис.7.16.Перехідні процеси по каналу «збурення -вихід»
Розрахуємо показники якості для цих перехідних процесів.
Для зручності зведемо всі показники якості до однієї таблиці
Таблиця 7.3. Показники якості перехідних процесів
|
«завдання-вихід» |
«збурення-вихід» | |||
|
РАФХ |
інженерний |
РАФХ |
інженерний | |
|
Статична похибка |
0,117 |
0,223 |
0,0177 |
0,0222 |
|
Динамічна похибка
|
0,275 |
0,128 |
0,06 |
0,036 |
|
Ступінь затухання
|
90,1 |
100 |
97 |
100 |
|
Час регулювання |
90 |
65 |
85 |
65 |
|
Перерегулювання
|
33,4 |
18,4 |
10,1 |
2,7 |
По результатам перехідних процесів
були зроблені розрахунки показників
якості, які показали, що П-регулятор з
налаштуваннями![]()
розрахований за допомогою інженерних методик кращий незважаючи на трошки більшу статичну похибку, так як час перехідного процесу та динамічна похибка менші.
Розраховуємо параметри налаштувань для головного регулятора.
Знайдемо передавальну функцію еквівалентного об’єкта
![]() (7.18)
(7.18)
где
![]() - передавальна функція допоміжного
регулятора
- передавальна функція допоміжного
регулятора
ПІ-регулятор.
Передавальна функція еквівалентного об'єкта для коригуючого ПІ-регулятора буде має вигляд

Текст програми:
m=0.3665;
w=0:0.0001:0.12;
p=-m*w+i*w;
Wr=38.5;
Wob=(0.08.*exp(-23.*p))./(68.*p+1);
Wop=(0.1.*exp(-10*p))./((55*p+1));
Wob_ekv=((Wr.*Wob)./(1+Wr.*Wop));
Re=real(Wob_ekv);
Im=imag(Wob_ekv);
Kp=-(m*Im+Re)./(Im.^2+Re.^2);
Ki=-w*(m.^2+1).*Im./(Im.^2+Re.^2);
plot(Kp,Ki);
 ylabel('Ku');
ylabel('Ku');
xlabel('Kp');
grid on;
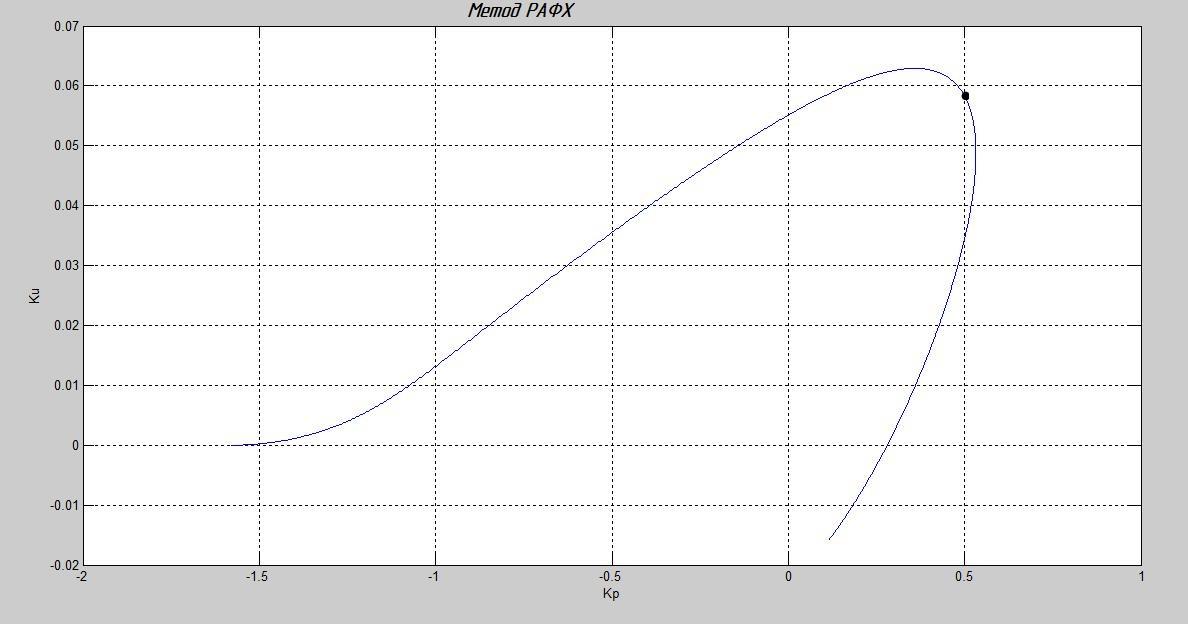
Рис. 7.17.Метод РАФХ для коригуючого регулятора
Для ПІ- регулятора беремoточку правіше від максимума і
знаходимо налаштування ПІ-регулятора
![]()
![]()
![]()
Промоделюємо каскадну систему за допомогою Simulink, для цього потрібно зібрати таку схему:

Рис. 7.18.Структурна схема каскадної АСР температури
Отримуємо такі перехідні процеси по каналу «завдання-вихід» та
«збурення-вихід»


Рис . 7.19.Перехідний процес по каналу «завдання-вихід»

Рис. 7.20.Перехідний процес по каналу «збурення-вихід»
Розрахуємо показники якості для цих перехідних процесів
Для зручності зведемо всі показники якості до таблиці 7.4.
Таблиця7.4.Показники якості перехідних процесів
|
|
«завдання-вихід» |
«збурення-вихід» |
|
Статична похибка |
0 |
0 |
|
Динамічна похибка
|
0,224 |
0,017 |
|
Ступінь затухання
|
82,14 |
89,27 |
|
Час регулювання |
170 |
150 |
|
Перерегулювання
|
22,4 |
19,17 |
Розрахуємо одноконтурну систему керування
Зробимо синтез ПІ-регулятора. Виконаємо розрахунок параметрів з використанням методу РАФХ. Виберемо перехідний процес з ψ = 0,9 m = 0,365. Для побудови РАФХ скористаємося формулами для ПІ-регулятора:
![]() (7.19)
(7.19)
![]() ,
(7.20)
,
(7.20)
де
![]() (7.21)
(7.21)
![]() (7.22)
(7.22)
Текс програми :
m=0.3665;
w=0.:0.0001:0.07;
W=(0.08*exp(-23*(-m*w+i*w)))./(68*(-m*w+i*w)+1);
Re=real(W);
Im=imag(W);
Kp=-(m*Im+Re)./(Im.^2+Re.^2);
Ki=-w*(m.^2+1).*Im./(Im.^2+Re.^2);
plot(Kp,Ki);
grid;
title('metod RAFH');
 ylabel('Kp/Tu');
ylabel('Kp/Tu');
xlabel('Kp');

Рис. 7.21.Метод РАФХ для розрахунку ПІ- регулятора одноконтурної ситеми керування
Знаходимо налаштування ПІ-регулятора![]()
![]()
![]()
 Складаємо
структурну схему для моделювання
перехідних процесів
Складаємо
структурну схему для моделювання
перехідних процесів

Рис. 7.22.Структурна схема моделювання перехідних процесів в одноконтурній АСР
Отримуємо такі перехідні процеси по каналу «завдання-вихід» та
«збурення-вихід»

Рис . 7.23.Перехідний процес по каналу «завдання-вихід»


Рис. 7.24.Перехідний процес по каналу «збурення-вихід»
Для зручності зведемо всі показники якості до таблиці 7.5.
Таблиця7.5.Показники якості перехідних процесів
|
|
«завдання-вихід» |
«збурення-вихід» |
|
Статична похибка |
0 |
0 |
|
Динамічна похибка
|
0,395 |
0,03 |
|
Ступінь затухання
|
89,87 |
100 |
|
Час регулювання |
223 |
233 |
|
Перерегулювання
|
39,5 |
9,78 |
Тепер розрахуємо АСР регулювання перегріву температури пари з сигналом із проміжної точки. Спочатку розраховуємо налаштування для головного регулятора
![]()
Розрахуємо налаштування за допомогою методу РАФХ
 Текст
програми:
Текст
програми:
m=0.3665;
w=0:0.001:0.25;
p=-m*w+i*w;
Wob=(0.08*exp(-23*p))./(68.*p+1);
Wop=(0.1*exp(-10*p))./((55*p+1));
Wob_ekv=Wob./Wop;
Re=real(Wob_ekv);
Im=imag(Wob_ekv);
Kp=-(m*Im+Re)./(Im.^2+Re.^2);
Ki=-w*(m.^2+1).*Im./(Im.^2+Re.^2);
plot(Kp,Ki);
title('metod RAFH');
ylabel('Kp/Tu');
xlabel('Kp');
grid on;

Рис. 7.25.Метод РАФХ для головного регулятора
Знаходимо налаштування ПІ-регулятора![]()
![]()
![]()
Звідси знаходимо налаштування
диференціатора![]()
![]()
![]()
 Тепер
перетворюємо схему,показано на рис.
7.9. і знаходимо налаштування регулятора
за допомогою методу РАФХ
Тепер
перетворюємо схему,показано на рис.
7.9. і знаходимо налаштування регулятора
за допомогою методу РАФХ
m=0.3665;
w=0:0.00001:0.09;
p=-m*w+i*w;
Kp=0.5;
Td=4.1;
Wob=(0.08*exp(-23*p))./(68.*p+1);
Wop=(0.1*exp(-10*p))./((55*p+1));;
Wd=(Kp*(Td*p))./(Td*p+1);
Wob_ekv=Wd.*Wop+Wob;
Re=real(Wob_ekv);
Im=imag(Wob_ekv);
Kp=-(m*Im+Re)./(Im.^2+Re.^2);
Ki=-w*(m.^2+1).*Im./(Im.^2+Re.^2);
plot(Kp,Ki);
title('metod RAFH');
ylabel('Kp/Tu');
xlabel('Kp');
grid on;

Рис. 7.26.Метод РАФХ дляналаштуваньрегулятора
Знаходимо налаштування ПІ-регулятора
![]()
![]()
![]()
 Проведемо
моделювання АСР перегріва пари з сигналом
з проміжної точки
Проведемо
моделювання АСР перегріва пари з сигналом
з проміжної точки
Складаємо структурну схему для моделювання перехідних процесів

Рис. 7.27.Структурна схема моделювання перехідних процесів в АСР з вводом проміжної точки
Отримуємо такі перехідні процеси по каналу «завдання-вихід» та
«збурення вихід»

Рис . 7.28.Перехідний процес по каналу «завдання-вихід»

Рис. 7.29.Перехідний процес по каналу «збурення-вихід»

Для зручності зведемо всі показники якості до таблиці 7.6.
Таблиця 7.6.Показники якості перехідних процесів
|
|
«завдання-вихід» |
«збурення-вихід» |
|
Статична похибка |
0 |
0 |
|
Динамічна похибка
|
0,18 |
0,202 |
|
Ступінь затухання
|
100 |
100 |
|
Час регулювання |
155 |
157 |
|
Перерегулювання
|
18,0 |
0 |
Порівняємо одноконтурну, каскадну та АСР з вводом проміжної точки.

Рис. 7.30.Структурна схема для порівняння АСР
 Отримуємо
такі перехідні процеси по каналу
«завдання-вихід» та
Отримуємо
такі перехідні процеси по каналу
«завдання-вихід» та
«збурення вихід»

Рис . 7.31.Перехідний процес по каналу «завдання-вихід»

Рис. 7.32.Перехідний процес по каналу «збурення-вихід»
 Для
зручності зведемо всі показники якості
до таблиці 7.7. та 7.8.
Для
зручності зведемо всі показники якості
до таблиці 7.7. та 7.8.
Таблиця7.7.Показники якості перехідних процесів
|
«Завдання-вихід» |
Одноконтурна АСР |
Каскадна АСР |
АСР з вводом проміжної точки |
|
| |||
|
Статична похибка
|
0 |
0 |
0 |
|
Динамічна похибка |
0,395 |
0,224 |
0,18 |
|
Ступінь затухання
|
89,87 |
82,14 |
100 |
|
Час регулювання |
223 |
170 |
155 |
|
Перерегулювання
|
39,5 |
22,4 |
18 |
Таблиця 7.8.Показники якості перехідних процесів
|
«Збурення-вихід» |
Одноконтурна АСР |
Каскадна АСР |
АСР з вводом проміжної точки |
|
| |||
|
Статична похибка
|
0 |
0 |
0 |
|
Динамічна похибка
|
0,03 |
0,017 |
0,202 |
|
Ступінь затухання
|
100 |
80,88 |
100 |
|
Час регулювання |
233 |
150 |
157 |
|
Перерегулювання
|
9,78 |
19,17 |
0 |
З приведених показників якості видно,
що найкращою з системою регулювання по
каналу «завдання-вихід» є АСР з вводом
проміжної точки вона має найменьший
час регулювання, динамічну похибку,найбільшу
степінь затухання.По каналу «збурення-вихід»
АСР з введенням проміжної точки трошки
поступається каскадній. Автоматичне
регулювання перегріву пари повинно
забезпечити підтримання температури
перегрітої пари в заданих межах незалежно
від навантаження котельного агрегату.
Для забезпечення надійної
та економічної роботи котла і турбіни
відхилення температури перегріву від
номінального значення на котлах
середнього та високого тисків не повинна
перевищувати 10*С.
надійної
та економічної роботи котла і турбіни
відхилення температури перегріву від
номінального значення на котлах
середнього та високого тисків не повинна
перевищувати 10*С.
Необхідність достатньо точної підтримки температури перегріву викликана наступними причинами:
- Метал труб котельного агрегату знаходиться в особливо важких умовах роботи;
- Підвищення температури вище допустимих значень може призвести до аварії внаслідок появи повзучості металу, підвищених теплових розширень і ряду інших причин;
- Надійність роботи турбіни при підвищенні температури пари обмежується граничними тепловими розширеннями її елементів;
- Зниження температури перегрітої пари знижує економічність роботи котла і ТЕЦ в цілому, крім того, значне зниження температури пара перед турбоагрегатом призводить до неприпустимого підвищення вологості в останніх щаблях турбіни і ерозії лопаток, наслідком чого виявляється збільшення питомої витрати пари, а в деяких випадках і аварійний на зупинка турбоагрегату.
З умов міцності металу труб пароперегрівача, паропроводу і турбіни важливо не тільки забезпечити підтримання температури в заданих межах, але й не допустити різких його змін. Зважаючи на наведені вимоги для регулювання перегрітої пари обираємо АСР з введенням проміжної точки ,тому що вона зможе більш точно підтримувати задану температуру перегріва пари.
Перевіримо АСР на грубість. Під грубістю
одноконтурної АСР розуміють малу
чуттєвість критерію функціонування до
варіацій параметрів. Для дослідження
системи було знято перехідні характеристик:
при змінному![]() ;
при змінному
;
при змінному![]() ;
при змінному
;
при змінному![]() - всі при оптимальних параметрах
налагоджування регулятора. Варіації
параметрів проводились в діапазоні
15%. Дослідження будемо проводити по обом
каналам: «завданням – вихід».
- всі при оптимальних параметрах
налагоджування регулятора. Варіації
параметрів проводились в діапазоні
15%. Дослідження будемо проводити по обом
каналам: «завданням – вихід».
 Варіація
Варіація![]()

Рис . 7.33.Перехідний процес по каналу «завдання-вихід»
Варіація
![]()

Рис . 7.34.Перехідний процес по каналу «завдання-вихід»
 Варіація
Варіація![]()

Рис . 7.35.Перехідний процес по каналу «завдання-вихід»
Зведемо дані показників якості до таблиці 7.9.
Таблиця7.9.Показники якості перехідних процесів
|
Параметри об’єкта |
Каналу «завдання-вихід» | ||||||
|
|
|
|
Y1 |
|
η, % |
Ψ,% | |
|
0,092 |
68 |
23 |
0,25 |
126 |
25 |
100 | |
|
0,08 |
68 |
23 |
0,18 |
155 |
18 |
100 | |
|
0,068 |
68 |
23 |
0,12 |
184 |
12 |
100 | |
|
0,08 |
78,2 |
23 |
0,18 |
180 |
18 |
100 | |
|
0,08 |
68 |
23 |
0,18 |
155 |
18 |
100 | |
|
0,08 |
57,7 |
23 |
0,2 |
115 |
20 |
100 | |
|
0,08 |
68 |
26,45 |
0,285 |
142 |
28,5 |
100 | |
|
0,08 |
68 |
23 |
0,18 |
155 |
18 |
100 | |
|
0,08 |
68 |
19,55 |
0,1 |
170 |
10 |
100 | |
 Розрахуємо
далі відносні коефіцієнти чутливості
за наступною формулою:
Розрахуємо
далі відносні коефіцієнти чутливості
за наступною формулою:
 (7.19)
(7.19)
де
![]() - відносний коефіцієнт чутливості для
змінного параметра Z;
- відносний коефіцієнт чутливості для
змінного параметра Z;![]() - поточне значення параметра;
- поточне значення параметра;![]() - оптимальне значення параметру;
- оптимальне значення параметру;![]() - відповідно поточне значення критерію
якості та значення при оптимальних
параметрах.
- відповідно поточне значення критерію
якості та значення при оптимальних
параметрах.
Таблиця 7.10.Коефіцієнти чуттєвості
-
Y1
tay.c
η, %
ψ
Коб
+15%
2,592593
1,247312
2,592593
0
-15%
2,833333
1,060215
2,833333
0
Tоб
+15%
0,392157
1,075269
0,392157
0
-15%
0,840291
1,948501
0,840291
0
tay об
+15%
3,888889
0,55914
3,888889
0
-15%
4,533333
0,5
4,533333
0
Так як коефіцієнти якості всі коефіцієнти чутливості більші ніж 0,1, система є не грубою по відношенню до варіації параметрів об’єкта.