

Лабы_идентификация
.pdfде yuk – значення функції відгуку в k-тому паралельному досліді u-того експерименту; k-номер паралельного досліду; m-загальна кількість паралельних дослідів (m=3).
Розрахувати порядкові дисперсії (дисперсії кожного експерименту)
|
|
|
|
|
m |
|
||||
|
|
|
|
|
å( yuk - |
|
u )2 |
|
||
|
|
|
|
|
y |
|
||||
|
2 |
|
|
k =1 |
|
|||||
|
S yu |
= |
|
|
|
|
|
(2.2) |
||
|
|
m -1 |
||||||||
|
|
|
|
|
|
|
||||
Розрахувати значення критерію Кохрена |
|
|||||||||
|
|
S |
2 |
max |
|
|||||
|
Gp = |
|
yu |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.3) |
|
|
|
N |
|
|
|
|
|
|
||
|
|
åS y2u |
|
|||||||
|
|
u =1 |
|
|
|
|
|
|
||
2 |
max – максимальне значення дисперсії експерименту; |
N - загальна |
||||||||
де S yu |
||||||||||
кількість експериментів в одній повторності (N=4).
Порівняти розраховане значення критеріїв КохренаGр із його табличним (критичним) значенням Gт при рівні значущостіq=0,05 та ступенях вільності f1=m-1=2 та f2=N. (Рівень значущості – ймовірність помилки при статистичному аналізі). Існують два види помилок:
1)Прийняття хибної гіпотези;
2)Відхилення вірної гіпотези.
Якщо Gp<Gт, то експериментальні дані відтворюють вплив вибраних нами
факторів на |
функцію |
відгуку |
і їх |
можна |
|
|
використати |
для |
побу |
||||||||||||||
математичної моделі. |
|
|
математичної |
моделі(коефіцієнтів рівняння |
|
||||||||||||||||||
2.2. |
Визначення |
параметрів |
|
|
|||||||||||||||||||
регресії) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
N |
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
N |
|
|
|
|
a |
|
|
å y u |
|
|
|
|
å yu x1u |
|
|
|
|
|
å yu x2u |
|
|
|
||||||
0 |
= |
u=1 |
; |
a |
= |
u=1 |
|
|
; |
a |
2 |
= |
|
u =1 |
; |
(2.4) |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
N |
|
1 |
|
|
|
N |
|
|
|
N |
|
||||||||||
|
|
Записати математичну модельy=a0+a1x1+a2x2 із числовими значеннями |
|
||||||||||||||||||||
параметрів. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
2.3. Перевірка параметрів математичної моделі (коефіцієнтів рівняння регресії) |
|
||||||||||||||||||||||
на їх значущість. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
Визначити дисперсію дослідів |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S02 = |
åS y2u |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
u =1 |
|
|
|
|
|
|
|
|
|
(2.5) |
|
|||||
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Визначити дисперсію коефіцієнтів рівняння регресії |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
S |
2 |
= |
|
|
S |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
aj |
|
|
N × m |
|
|
|
|
|
|
|
(2.6) |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
11

Значущість коефіцієнтів рівняння регресії оцінити за критерієм Стюдента
a j
t paj = |
|
Saj2 |
|
|
|
|
(2.7) |
|
|
|
|
|
|
||
Порівняти розраховані значення t paj |
для кожного |
коефіцієнта рівняння |
|||||
регресії із його табличним(критичним) |
значенням |
tт при |
рівні |
значущості |
|||
q=0,05 та ступені вільностіN(m-1)=8. Якщо t paj > |
tт , |
то |
даний |
коефіцієнт |
|||
вноситься вх математичну модель.
2.4.Перевірка отриманої математичної моделі на її адекватність. Визначити дисперсію адекватності
N
å( yu - yˆu )2
|
Sад2 = |
u =1 |
|
|
|
|
|
|
(2.8) |
|
||
|
|
N - l |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||
де yˆu - розраховане значення функції відгуку за результатами u-того |
|
|||||||||||
експерименту; |
l - кількість значущих коефіцієнтів рівняння регресії |
|
|
|||||||||
(параметрів математичної моделі). |
|
|
|
|
|
|
|
|
||||
Оцінку |
адекватності |
|
отриманої |
|
математичної |
моделі |
здійснити |
з |
||||
критерієм Фішера: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
= |
S 2 |
|
|
|
|
|
||
|
|
p |
ад |
|
, |
|
|
(2.9) |
|
|||
|
|
2 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
S0 |
|
|
|
|
|
|
порівнявши Fp |
із його |
табличним(критичним) значенням Fт |
при рівні |
|
||||||||
значущості q=0,05 та ступенях вільності f1=N- l і f2=N(m-1)=8. Якщо Fp< Fт,то |
|
|||||||||||
отримана математична модель є адекватною. |
|
|
|
|||||||||
Контрольні запитання
1.Особливості активного експерименту.
2.Відмінності в методиці проведення активного експерименту класичним способом та методами планування експерименту.
3.Яким чином оцінюється відтворюваність експериментальних даних?
4.Охарактеризуйте методику визначення значущості коефіцієнтів рівняння регресії.
5.Як встановлюється адекватність отриманих математичних моделей за результатами повного факторного експерименту?
12
Лабораторна робота №3.
Адаптивнна ідентифікація статичних об'єктів управліня методом стохастичної апроксимації
Мета: засвоїти методику адаптивної ідентифікації нестаціонарних об'єктів управління.
Загальні відомості
Більшість об'єктів управління є нестаціонарними,тобто вони змінюють
свої характеристики, властивості в часі. Головною причиною цих змінювань є |
|
||||||
вплив зовнішнього середовища. Нестаціонарність може проявлятись у вигляді |
|
||||||
повільного змінювання характеристик(еволюційні змінювання) чи в якісних |
|
||||||
стрибкоподібних |
(різких) змінюваннях (революційних). Для |
забезпечення |
|
||||
адекватності математичних моделей таких об'єктів, вони повинні мати функцію |
|
||||||
адаптивності. Ця |
особливість |
полягає |
в , |
томущо модель |
повинна |
||
відслідковувати |
еволюційні |
змінювання |
в |
об'єкті |
управління |
шляхо |
|
змінювання її параметрів (адаптивна параметрична ідентифікація), а у випадках революційних змінювань в об'єкті управління-шляхом змінювання структури.
Адаптивні методи ідентифікації можна розбити на два класи:
-неітераційні;
-ітераційні.
В неітераційних методах параметри і можлива структура моде
визначають чи уточнюють на |
певному масиві інформації, отриманої від об'єкта |
за деякий інтервал часу. В |
ітераційних методах адаптивної ідентифікації |
проводиться уточнення, як правило, параметрів математичної моделі на кожному кроці ітерації. Серед методів параметричної ітераційної ідентифікації найбільше розповсюдження має метод стохастичної апроксимації. Метод стохастичної апроксимації є також оптимізаційною задачею, як і метод найменших квадратів.
Критерій оптимальності має вигляд:
|
|
|
|
k |
r |
r |
|
|
(3.1) |
|
|
|
Ф= å ( уіе - A j |
X ie ) 2 |
¾¾® min |
||||
де yеі − |
|
|
|
і =1 |
|
|
|
і-му кроці адаптації; X ei − |
|
значення |
вихідною змінної, отримане на |
||||||||
вектор значень вхідних змінних, отриманий на і-му кроці адаптації; А j − вектор |
|||||||||
оцінок |
параметрів |
математичної |
моделі, визначений на і-му кроці |
адаптації |
|||||
(ітерації); |
і, k-номери кроків ітераційної ідентифікації. |
|
|||||||
В такій постановці параметрична ідентифікація як оптимізаційна задача |
|||||||||
виконується на кожному |
кроці |
адаптації. Таку складну задачу |
оптимізації |
||||||
можна спростити у тому випадку, коли математична модель представлена у |
|||||||||
вигляді |
|
диференцьовувана |
функції |
і |
для |
оптимізації |
використовуються |
||
градієнтні |
методи. |
Наприклад, якщо математична модель є |
лінійною чи |
||||||
лінійною за параметрами, то коефіцієнти цієї моделі можна уточнювати за |
|||||||||
рекурентними формулами: |
|
|
|
|
|
|
|||
Лінійна модель: |
у=а0+а1х1+а2х2 |
|
|
|
|
||||
Лінійна за параметрами: у= а0+а1х1+а2х12 |
|
|
|
|
|||||
|
|
|
аk+1=аk+jk*f( А k, Х k+1) |
|
|
(3.2) |
|||
13
де аk+1, аk − відповідно оцінки параметра ММ(лінійною за параметрами), визначені на поточному та попередньому кроках адаптації; Х k+1 − вектор вхідних змінних, отриманий на поточному кроці адаптації; А k − вектор оцінок параметрів математичної моделі, визначений на попередньому кроці адаптації; jk − параметр адаптації.
Параметр адаптації − це числова послідовність, яка повинна задовольняти вимогам Дворецького:
1) lim jk =0
k ®¥
¥
2) å jk = ¥, "n
k=n
¥
3)å( jk )2 < ¥
k =1
Таким вимогам задовольняє послідовність вигляду:
jk = A , де А, В – постійні коефіцієнти, які є настройками параметрів
B + k
алгоритму адаптації.
Опис лабораторної установки
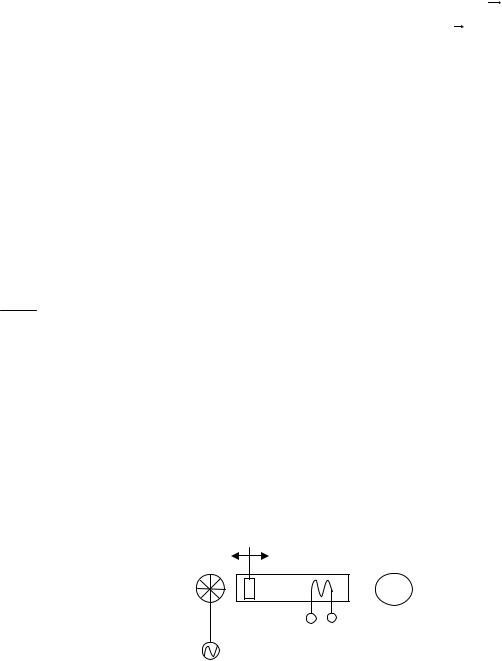
Об’єктом досліджень є тепловий об’,єктщо являє собою трубу з електронагрівачем, в якому вентилятором подається холодне повітря. Кількість повітря, що подається в трубу регулюється за допомогою шиберу, який змінює своє положення за допомогою пневматичного виконавчого механізму за рахунок зміни тиску стиснутого повітря. Вихідною змінною є температура на виході з труби.
X(k)
Y(k)
ТЕ
Рис. 3.1. Структурна схема теплового об’єкта.
Лабораторний стенд складається із автоматичного моста КСМ-3 1 із пневмоперетворювачем, пневматичних вторинних приладів 2 та 3, об’єкта 6, вентилятора 7, автотрансформатора 5 та пневматичного виконавчого механізму із регулюючим шибером 4.
14
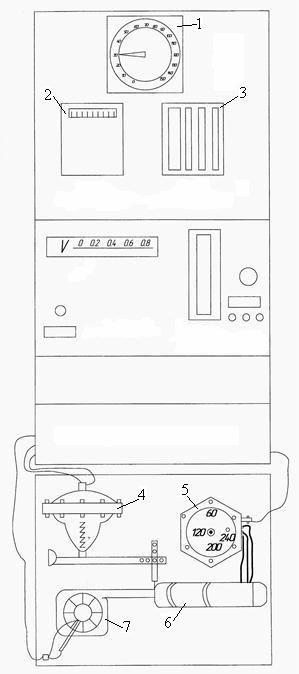
Рис. 3.2. Схема лабораторного стенду.
Порядок виконання роботи
1.Ввімкнути лабораторну установку та вентилятор.
2.За допомогою задатчика приладу 3 встановити випадкове значення тиску в межах від 0,85 до 1,0 кгс/см2.
3.Після закінчення перехідного процесу виміряти значення температури на приладі 1.
4.Задатчиком приладу 3 встановити мінімальне значення тиску 0,2 кгс/см2.
5.Після зниження температури в об’єкті 6 до температури навколишнього середовища перейти до пункту 2.
6.Експеримент проводити в кількості кроків адаптації, вказаній викладачем.
7.Результати експериментів занести в таблицю 3.1.
15
8.Розрахувати параметри математичної моделі за формулою 3.2, використавши програму ADAPT.pas.
9.Побудувати графіки змінювання параметрів математичної моделі у=а0+а1х в процесі адаптації при значеннях параметрів А і В, вказаних викладачем.
10.Провести якісний аналіз графіків адаптивної ідентифікації при змінюванні параметрів А і В.
Таблиця 3.1
№ |
|
|
|
|
1 |
|
2 |
|
3 |
|
4 |
|
5 |
|
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
|
15 |
|||||||||
кроку |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
k |
|
кг·с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X1 |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
см2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
16 |
|
17 |
18 |
19 |
|
20 |
|
21 |
|
22 |
23 |
|
24 |
|
25 |
|
26 |
|
27 |
|
28 |
|
29 |
|
30 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Контрольні запитання
1. Що таке нестаціонарний об’єкт?
2. Чим відрізняються ітераційні та неітераційні методи адаптив ідентифікації?
3.Охарактеризуйте властивості параметра адаптації.
4.Чому метод стохастичної апроксимації є оптимізаційним?
5.Назвіть умови Дворецького для параметра адаптації.
Лабораторна робота №4 Експериментальне визначення динамічних характеристик об’єкта
управління Мета: освоїти методику експериментальних досліджень динамічних об’єктів
управління (ОУ), навчитись |
визначати |
динамічні |
характеристики |
ОУ |
|
аналітичними та графо-аналітичними методами. |
|
|
|
|
|
Загальні положення |
всього |
визначають шляхом |
|
||
Динамічні характеристики |
ОУ частіше |
|
|||
нанесення на об’єкт спеціально організованих дій стрибкоподібної форми, у вигляді імпульсу чи гармонійних коливань. Найпростіше здійснюється
подача стрибкоподібної вхідної .діїУ об’єкті із самовирівнюванням
отримуємо після нанесення стрибкоподібної дії криву розгону. Для |
|
||||||||
багатоємнісних об’єктів крива розгону маєS-подібний характер. Тобто |
|
||||||||
вона має точку перегину, в якій швидкість змінювання вихідної змінної є |
від |
||||||||
найбільшою. |
Встановлено, |
що |
характер |
кривої |
розгону залежить |
||||
ємності об’єкта (кількості елементарних динамічних ланок), характер |
|
||||||||
кривої розгону визначається характерними часовими параметрами рис4.1. |
гра |
||||||||
На |
основі |
наведених |
часових |
параметрів |
розроблено |
ряд- |
|||
аналітичних методів, які дають |
можливість |
за допомогою номограм |
чи |
|
|||||
16

графічних побудов визначити динамічні характеристики .ОУСеред графоаналітичних методів використовується метод кратних коренів та методи номограм.
|
|
|
|
Рис. 4.1. Крива розгону багатоємнісного об’єкта. |
|||||||||||||
Метод кратних коренів використовується для |
побудови динамічних |
||||||||||||||||
моделей |
ОУ, |
які можна |
|
представити |
у |
вигляді |
послідовно з’єднаних |
||||||||||
аперіодичних ланок 1-го порядку, у яких однакова стала часу. Модель такого |
|||||||||||||||||
об’єкта апроксимується передаточною функцією |
|
|
|
||||||||||||||
W= |
|
Коб |
|
; n - кількість ланок ; Коб= |
Dу |
- коефіціент передачі об’єкта. |
|||||||||||
|
+ Тоб × р)n |
|
|||||||||||||||
(1 |
|
|
|
|
|
|
|
|
Dх |
|
|
|
|||||
Наприклад, для двохємністного об’єкта сталі часуТ1 |
і Т2 визначаються |
||||||||||||||||
графо-аналітичним методом шляхом визначення площі S над кривою розгону |
|||||||||||||||||
|
|
|
|
|
|
S |
|
|
|
|
|
n |
|
|
|
||
|
|
|
|
|
|
|
|
|
= åTi = nT |
|
|
||||||
|
|
|
|
|
|
y(¥) - y(0) |
|
|
|||||||||
|
|
|
|
|
|
|
|
i=1 |
|
|
|
||||||
де у(0) та у(∞) – відповідно початкове та кінцеве значення вихідної змінної. |
|||||||||||||||||
Інший метод полягає в апроксимації математичної моделі функцією |
|||||||||||||||||
|
|
|
|
|
W ( p) = |
|
ke |
- ptд |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
( T T +1)2 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
де tд – час запізнення.
Для визначення Т1 і Т2 використаємо відоме співвідношення
S = Т1 + Т2 + tд
Позначивши S - tд = В, побудуємо півколо діаметромВ і проведемо паралельну йому пряму на відстані 
 T1T2 . Перпендикуляр, опущений з точки перетину цієї прямої з окружністю, розділить діаметр на відрізкиТ1 і Т2 (рис.
T1T2 . Перпендикуляр, опущений з точки перетину цієї прямої з окружністю, розділить діаметр на відрізкиТ1 і Т2 (рис.
4.2).
Методу частково властиві недоліки інтерполяційних способів визначення величин Т1 і Т2, але він має і позитивні відмінності від останніх: використання порівняння S = Т1 + Т2 + tд дозволяє в деякій мірі врахувати форму всієї перехідної функції h(t). Разом з тим зростає обсяг обчислень, необхідних для визначення S методами чисельного інтегрування.
17
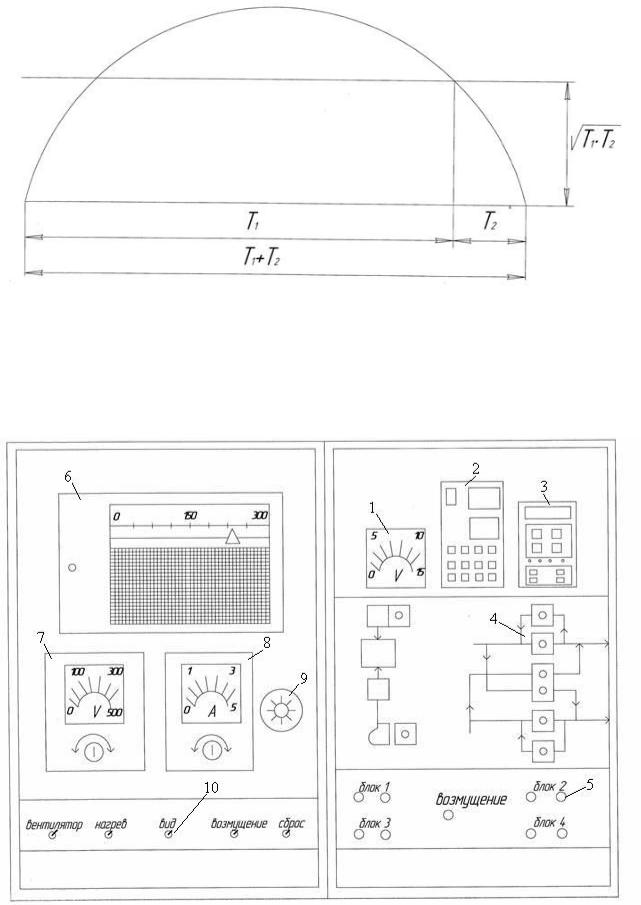
Рис. 4.2. Знаходження коефіцієнтів T1 і Т2 графічним шляхом.
Опис лабораторної установки
Лабораторна установка складається із двох стендів рис. 4.3. На правому стенді розміщені вольтметр 1, регулюючий мікропроцесорні контролери Р-130 2, ПРОТАР 3, мнемосхема 4, електронний імітатор об’єкта 5.
Рис. 4.3. Схема лабораторної установки.
18

На лівому стенді знаходяться потенціометр КСП-4 6, вольтметр 7, амперметр 8, автотрансформатор 9. Нижче розміщена панель тумблерів керування 10.
Порядок виконання роботи
1.Ввімкнути тумблер “возмущение” і вимкнути тумблер “сброс”. Потенціометром “возмущение” змінити напругу, яка контролюється вольтметром 1, у межах від 2,5 до 5 В (вхідна змінна Х, В).
2.Провести реєстрацію кривої розгону, результати якої занести в таблицю 4.1.
3.Побудувати графік кривої розгону, на якому методами кратних коренів та номограм визначити значення сталих часу T1 і Т2.
4.Визначити сталі часу T1 і Т2 за допомогою програми ROZGON.bas.
5.Оцінити точність визначення сталих часу T1 і Т2 різними методами.
Таблиця 4.1
t,с
yе,ºC
ум,ºC
Контрольні запитання
1.Особливості кривих розгону багатоємнісних об’єктів.
2.Характеристика методу кратних коренів.
3.Характеристика використання методу номограм при визначенні сталих часу багатоємнісних об’єктів.
4.Переваги та недоліки аналітичних та графо-аналітичних методів.
19

Навчальне видання
ІДЕНТИФІКАЦІЯ ТА МОДЕЛЮВАННЯ ОБ’ЄКТІВ АВТОМАТИЗАЦІЇ
МЕТОДИЧНІ ВКАЗІВКИ до виконання лабораторних робіт
для студентів за напрямом підготовки 6.050202 “Автоматизація та комп’ютерно-інтегровані технології”
денної та заочної форм навчання
СХВАЛЕНО на засіданні кафедри автоматизації і комп’ютерно-
інтегрованих технологій Протокол № 12
від 12.04.2011 р.
Укладачі: В.Д. Кишенько С.А. Киричук Є.С. Проскурка
Видання подається в авторській редакції
Підп. до друку 26.07.11. Ум. друк. арк. 1,16. Наклад 130 пр.
Зам. № 203-11А
НУХТ. 01601 Київ-33, вул. Володимирська, 68 www.book.nuht.edu.ua
Свідоцтво про реєстрацію серія ДК № 1786 від 18.05.04 р.
20