

16Мпс на мікроконтролерах, мікропроцесорах та dsp
Вхідний контроль:
Яку архітектуру можуть мати багатопроцесорні системи?
Які функції має виконувати інтерфейс у багатопроцесорній системі?
Яку розрядність шини адреси можуть мати мікроконтролери фірми MotorolaMC68HC05JтаМС68НС11?
З якою метою зреалізовується клямкування адреси у МПС, якщо шина адреси/даних мікропроцесора є мультиплексована?
З якою метою в МПС використовується пріоритетний шифратор?
З якою метою в МПС використовується декодер вектора переривань?
DSPпрацюють переважно у складі багатопроцесорних систем, принаймні двопроцесорних, де другим процесором, так званимHost-процесором, може бути мікропроцесор, мікроконтролер, іншийDSPабо апаратний ПДП. Зв’язок поміжDSPтаHost-процесором зреалізовується черезHost-інтерфейс (НІ). На прикладіHost-інтерфейсуDSPсімействаDSP56000 фірмиMotorolaрозглянемо його структуру.НІ– 8-бітний повнодуплексний, з подвійною буферизацією паралельний порт, який долучується безпосередньо до шини даних Host-процесора.HI– асинхронний інтерфейс, який вміщує два банки регістрів: один, доступнийHost-процесору, і другий банк, доступний процесоруDSP.НІзабезпечує швидкість передавання пакетів 8 Мбайт/с, максимальна швидкість передавання даних при обробленні переривань становить 1,71 мільйона 24-розрядних слів/с.
Структуру НІподано на рис. 16.1. ПроцесорDSPрозглядаєНІяк периферійний пристрій, який займає три 24-бітові слова у просторі пам’яті даних. Регістри інтерфейсу є доступні за допомогою стандартних команд процесора і способів адресування. При програмному та апаратному скиданніНІвикористовується задля стандартного введення-виведення.
На рис. 16.2 наведено двопроцесорну систему на базі DSP56000 та мікроконтролераМС68НС11 фірмиMotorola, який має мультиплексовані шини адреси та даних і тому потребує клямкування адреси. Усі невикористовувані входи може бути підімкнено до живлення через резистор, як, наприклад,¬HAСK, задля запобігання виникнення помилкових сигналів.
Двоспрямована шина даних Н7...Н0 використовується для передавання даних поміжHost-процесором таDSP. Виходи адресиНА2...НА0 забезпечують адресне вибирання регістрівНІ, вони є стабільні, якщо вхід ¬НЕNдозволу переривань має низький активний рівень. ВхідHR/¬Wвибирає напрямок передавання даних при доступі доHost-процесора. ЯкщоHR/¬W= 1 та¬HENє активний, дані передаються зDSPдоHost-процесора; якщоHR/¬W= 0, то за активного входу ¬HENдані передаються зHost-процесора доDSP. ВхідHR/¬Wє стабільний, якщо¬HENє активний. Вхід¬HEN– дозвілHOST, дозволяє передавати дані шиною данихHOST. Якщо¬HENне є активний, лінії шини даних перебувають у третьому стані. Вихід¬HREQзабезпечує надходження відDSPдоHost-процесора, контролера ПДП або іншого зовнішнього контролера
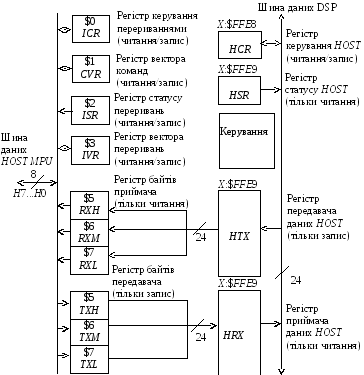
Рисунок 16.1 – Структура НІ
сигналу запиту на переривання ¬IRQ. Вихід¬HREQможе сполучуватись з контактом запиту на перериванняHost-процесора, запитом передавання контролера або входом керування зовнішнього пристрою. Вихід¬HACK– забезпечення сигналу відповіді за операцій ПДП та сигналу відповіді – за переривання для сумісності з процесорами сімействаМС68ХХХ. У першому випадку сигнал¬HACKвикористовується для стробування даних за операцій ПДП, а у другому – для дозволу видавання на шину даних вектора переривань, якщо сигналHREQє активний.
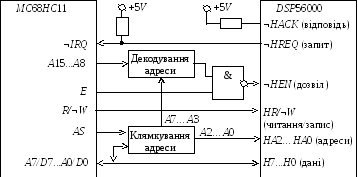
Рисунок 16.2 – Система на базі DSPтаМC68НС11
На рис. 16.3 наведено двопроцесорну систему на базі DSP56000 та процесораМС68000 фірмиMotorola. ПроцесорМС68000 може використовувати командуMOVEPзі словом, довгим словом задля передавання доDSPабо читання з нього послідовності даних. При використовуванні в якості Host-процесораМС68020 абоМС68030 у будь-якій команді може використовуватись динамічно змінюваний розмір шини.
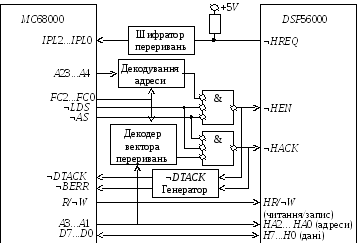
Рисунок 16.3 – Система на базі DSP та МС68000
На рис. 16.4 наведено мікропроцесорну систему з чотирьох DSP, які сполучуються за допомогою одногоHost-інтерфейсу. Така МПС може виконувати до 41-го мільйона команд на секунду і може масштабуватись для підвищування продуктивності.SSIна рис. 16.4 – послідовний інтерфейс.
Контрольні питання:
Яку роль у багатопроцесорних системах відіграє мікроконтролер і яку – DSP?
Яку роль у багатопроцесорних системах відіграє мікропроцесор і яку – DSP?
За допомогою якого вузла DSPзреалізовується долучання його доHost-процесора?
Які пристрої можуть використовуватись в якості Host-процесора?
Контрольні питання підвищеної складності:
У який спосіб можуть обмінюватися інформацією процесори у багатопроцесорних системах?
У який спосіб за послідовного чи паралельного передавання даних зреалізовується обмін поміж DSPтаHost-процесором?
Чи є передавання даних через Host-інтерфейс: синхронне? асинхронне?
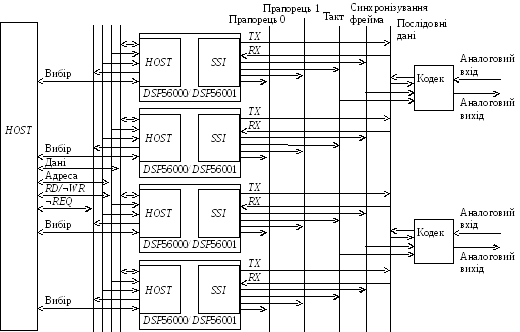
Рисунок 16.4 – Система на базі кількох DSP