

13.3 Налаштовування вбудованих засобів мікроконтролерів
Вхідний контроль:
Які периферійні пристрої входять до складу мікроконтролера МС68НС705J1А?
Для чого використовується регістр MORблока конфігурування МКМС68НС705J1Аі яке призначення мають його окремі розряди?
Яке призначення має блок контролю функціонування МК МС68НС705J1Аі які пристрої входять до його складу?
Яка різниця існує поміж послідовними і паралельними портами мікроконтролера?
Які порти входять до складу МК МС68НС705J1А?
Які регістри входять до складу паралельних портів МК МС68НС705J1А?
За допомогою яких команд можна здійснювати запис до регістра DDRA?
В який спосіб визначається напрямок обміну через паралельний порт МК МС68НС705J1А?
Виводи паралельних портів МК МС68НС705J1Аможна використовувати для обміну будь-якими сигналами. При використовуванні окремих розрядів можна формувати на них сигнали у послідовному вигляді, тобто МК можна використовувати в якості генератора послідовності імпульсів потрібної частоти і щілинності. Блок-схему алгоритму функціонування МКМС68НС705J1Ав якості генератора імпульсів подано на рис. 13.29.
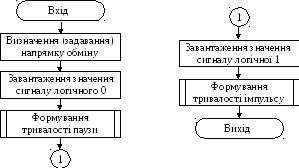
Рисунок 13.29 – Блок-схема алгоритму роботи МС68НС705J1А
в якості генератора імпульсів
Визначення напрямку обміну зумовлюється встановленням відповідного біта в регістрі напрямку пересилання DDRA(адреса $0004) абоDDRB(адреса $0005), як було показано в розділі 13.1.1. Вважаємо, що це будуть всі 8 виводів портуА.
Виведення здійснюється з регістра даних порту PORTA, до якого треба завантажити значення сигналу з акумулятораА. Виведення даних триватиме упродовж такого відтинку часу, допоки сигнали на виходах порту не змінять свого значення. Тому треба сформувати часовий інтервал, котрий визначатиме час формування імпульсу чи то паузи поміж імпульсами. Цей часовий інтервал формується за допомогою підпрограми формування тривалості; вважаємо, що послідовність розпочинається з паузи (рівень логічного 0). Зазвичай формування часових інтервалів може відбуватися за допомогою таймера чи то у програмний спосіб. При формуванні часового інтервалу в програмний спосіб розроблюється циклічна підпрограма, час виконування якої дорівнює заданому часовому інтервалові. При розв’язуванні нашого завдання ця підпрограма може бути побудована за алгоритмом, який подано на рис. 13.30. На цьому рисунку не зазначено блоки входу та виходу, тому що вважається, що робота цієї підпрограми здійснюється згідно з алгоритмом рис. 13.29.
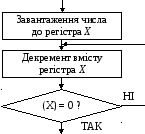
Рисунок 13.30 – Блок-схема алгоритму підпрограми часової затримки
Число, завантажуване до регістра, визначає час затримки підпрограми.
Після виконання цієї підпрограми слід завантажити до регістра даних нове значення сигналу і сформувати часову затримку, що дорівнювала б часові виведення цього значення.
За алгоритмом рис. 13.29, з урахуванням алгоритму рис. 13.30, розроблюємо програму генератора імпульсної послідовності мовою Асемблер:
lda#ff ; Визначення напрямку обміну на виведення
sta$0004 ; даних каналом А
М3: lda#00 ; Завантаження рівня сигналу, який
; виводитиметься каналом А
sta$0000 ; Виведення каналом А сигналу логічного 0
jsrM1 ; Безумовний перехід до підпрограми затримки,
; розташованої за міткою М1
lda#ff ; Встановлення рівня логічної 1 і виведення цього
sta $0000 ; сигналу каналом А
jsrM2 ; Безумовний перехід до підпрограми,
; розташованої за міткою М3
braМ3 ; Безумовний перехід до формування нового
; періоду сигналу
M1: ldx#8 ; Завантаження до індексного регістра Х кількості
; циклів виконування підпрограми формування
; сигналу логічного 0
M4: decx ; підпрограма формування часового інтервалу
; паузи поміж імпульсами. Декремент вмісту
; регістра Х
bneM4 ; Умовний перехід до командиdecx
rts ; Вихід з підпрограми формування часового
; інтервалу паузи поміж імпульсами. Повернення
; здійснюється до команди lda#ff, що є
; наступною за командою звернення до цієї
; підпрограми
M2: ldx #4 ; Завантаження до індексного регістра Х кількості
; циклів виконування підпрограми формування
; сигналу логічної 1
M5: decx ; підпрограма формування одного імпульсу
; з послідовності
; Декремент вмісту регістра Х
bneM5 ; Умовний перехід до командиdecx
rts ; Вихід з підпрограми формування часового
; інтервалу паузи поміж імпульсами. Повернення
; здійснюється до команди bra
Ця програма формуватиме імпульсну послідовність, частота слідування імпульсів в котрій визначатиметься тактовою частотою МК.
Використовуючи таймер, який входить до складу МК, можна також формувати сигнали з потрібною часовою затримкою і використовувати ці сигнали задля керування потрібними об’єктами. Для формування потрібних часових інтервалів можна використовувати сигнали переривання від таймера або від периферійних пристроїв.
Припустімо, що треба розробити програму керування станом об’єкта (періодичне включення/виключеня) по переповнюванні 15-розрядного лічильника багатофункціонального таймера MFT, якщо не надходить сигнал зовнішнього переривання. В разі надходження сигналу зовнішнього переривання, який надходить на вивід 0 портуА, програма формує сигнал логічної 1 на виводі 7 портуА.
Програма, яка функціонуватиме за цим алгоритмом, матиме такий вигляд:
CLRX ; Обнулення індексного регістра Х
LDa#$80 ; Завантаження сигналу включення, який
; виводитиметься у 8-му розряді порту А
STa$0000 ; Включення зовнішнього пристрою по каналу А
LDa#$FE ; Завантаження до регістра А коду, який
; визначатиме виводи порта А РА7...РА1 як
; виходи, а вивід РА0 – як вхід
STA $0004 ; Завантаження коду з регістра А до регістра
; напрямку пересилання DDRA
BSET 5,$0008 ; Встановлення біта дозволу переривання
; переповнювання лічильника у регістрі TSCR
CLI ; Скидання ознаки І в регістрі CCR (дозвіл
; переривання)
M1: JMP M1; Безумовний перехід на ту саму команду задля
; формування затримки формування вихідного
; сигналу до моменту переповнювання лічильника
; у багатофункціональному таймері
М2: BSET 3,$0008; Встановлення біта TOFR (біт скидання ознаки
; переповнювання) у регістрі TSCR
ldA$0000 ; Завантаження до акумулятора А вмісту регістра
; даних PORTA (число #$80)
EOR #$80 ; Обнулення вмісту акумулятора
STA $0000 ; Відключення зовнішнього пристрою по каналу А
; (виведення рівня логічного 0 каналом А)
rtI ; Вихід з підпрограми обслуговування
; переривання (повернення до команди JMP M1)
М3: BSET 1,$000A ; скидання ознаки IRQR (скидання запиту
; на переривання)і скидання ознаки IRQF
; (відсутність запиту на переривання) в регістрі
; ISCR
BSET 7,$0000; Виведення сигналу через вивід 7 PORTA
rtI ; Вихід з підпрограми формування сигналу на
; виводі 7 PORTA
До складу цієї програми входять дві підпрограми, які позначено мітками М2 таМ3. ПідпрограмаМ2 призначена для формування сигналу вимикання зовнішнього пристрою, який підімкнено до портуА. Повернення з цієї підпрограми відбувається до команди, позначеної міткоюМ1, яка формує часову затримку до моменту переповнювання лічильника багатофункціонального таймераMFT. Переповнювання лічильника призводить до встановлення внутрішнього переривання, яке забезпечує циклічне змінювання стану виводу 8 портуА. Для правильного функціонування програми до пам’яті слід завантажувати адреси, до яких здіснюватиметься звернення при виконуванні відповідних переривань.
$07F8 03 0F03 18 03 00 03 00
У комірках пам’яті з адресами $07F8 та $07F9 розміщено початкову адресу підпрограми обробки переривання по переповнюванні лічильника – $030F, в комірках $07FАта $07FВ – початкову адресу підпрограми обробки зовнішнього переривання – $0318 і в наступних комірках – початкову адресу розміщення всієї програми.
Звернення до підпрограми, позначеної міткою М3, здійснюється лише за наявності зовнішнього переривання.
Програма формує часові інтервали, що вони дорівнюють часові виконування 1025 та 1022 машинних тактів МК. Тривалість цих інтервалів можна змінити, встановлюючи потрібні значення RT1-0 в регістріTSCR.
Протокол виконування програми в режимі обробки переривання по переповнюванні лічильника наведено в табл. 13.11. В протоколі не зазначено вміст регістрів, які не використовуються при виконуванні цієї програми: регістра даних порту В, регістра напрямку пересилання порту В та регістраPDRB, а також регістрівISCRтаPDRA, які не змінюють своїх значень, $80 та $00 відповідно. В колонціCYCLESнаведено кількість машинних циклів, яка відповідає виконуванню поточної команди.
Таблиця 13.11 – Протокол виконування програми періодичного
включення/відключення периферійного пристрою за сигналом
переповнення лічильника
|
Команда |
A |
X |
PORTA |
DDRA |
TSCR |
TIMER |
CCR |
CYCLES |
|
CLRX |
XX |
$00 |
XX |
$00 |
$03 |
$00 |
111.I… |
$00 |
|
LDa#$80 |
$80 |
$00 |
XX |
$00 |
$03 |
$00 |
111.I.Z. |
$03 |
|
STa$0000 |
$80 |
$00 |
XX |
$00 |
$03 |
$01 |
111.IN.. |
$05 |
|
LDa#$FE |
$80 |
$00 |
XX |
$00 |
$03 |
$02 |
111.IN.. |
$09 |
|
STA $0004 |
$FE |
$00 |
XX |
$00 |
$03 |
$02 |
111.IN.. |
$0B |
|
Формування сигналу включення | ||||||||
|
BSET 5,$0008 |
$FE |
$00 |
$80 |
$FE |
$03 |
$03 |
111.IN.. |
$0F |
|
CLI |
$FE |
$00 |
$80 |
$FE |
$23 |
$05 |
111.IN.. |
$14 |
|
JMP M1 |
$FE |
$00 |
$80 |
$FE |
$23 |
$05 |
111..N.. |
$16 |
|
… | ||||||||
|
JMP M1 |
$FE |
$00 |
$80 |
$FE |
$23 |
$FF |
111..N.. |
$3FD |
|
JMP M1 |
$FE |
$00 |
$80 |
$FE |
$A3 |
$00 |
111..N.. |
$400 |
|
BSET 3,$0008 |
$FE |
$00 |
$80 |
$FE |
$A3 |
$03 |
111.IN.. |
$40D |
|
ldA$0000 |
$FE |
$00 |
$80 |
$FE |
$23 |
$04 |
111.IN.. |
$412 |
|
EOR #$80 |
$80 |
$00 |
$80 |
$FE |
$23 |
$05 |
111.IN.. |
$415 |
|
STA $0000 |
$00 |
$00 |
$80 |
$FE |
$23 |
$05 |
111.I.Z. |
$417 |
|
rtI |
$00 |
$00 |
$00 |
$FE |
$23 |
$06 |
111.I.Z. |
$41B |
|
Формування сигналу відключення | ||||||||
|
JMP M1 |
$FE |
$00 |
$00 |
$FE |
$23 |
$09 |
111..N.. |
$424 |
|
… | ||||||||
|
JMP M1 |
$FE |
$00 |
$00 |
$FE |
$23 |
$FF |
111..N.. |
$7FC |
|
JMP M1 |
$FE |
$00 |
$00 |
$FE |
$23 |
$FF |
111..N.. |
$7FF |
|
JMP M1 |
$FE |
$00 |
$00 |
$FE |
$A3 |
$00 |
111..N.. |
$802 |
|
BSET 3,$0008 |
$FE |
$00 |
$00 |
$FE |
$A3 |
$03 |
111.IN.. |
$807 |
|
ldA$0000 |
$FE |
$00 |
$00 |
$FE |
$23 |
$05 |
111.IN.. |
$814 |
|
EOR #$80 |
$00 |
$00 |
$00 |
$FE |
$23 |
$05 |
111.I.Z. |
$817 |
|
STA $0000 |
$00 |
$00 |
$00 |
$FE |
$23 |
$06 |
111.IN.. |
$819 |
|
rtI |
$80 |
$00 |
$80 |
$FE |
$23 |
$07 |
111.IN.. |
$81D |
Контрольні питання:
У який спосіб можна задати час затримки, що він формується при виконуванні часової затримки?
У який спосіб можна здійснювати вихід з підпрограми часової затримки за різних способів її побудови?
Чим визначатиметься час затримки при використовуванні переривання за переповнювання лічильника?
Скільки розрядів має регістр-лічильник багатофункціонального таймера MFT?
Контрольні питання підвищеної складності:
В чому полягає призначення бітів RT1-0 і як значення їхнього вмісту можна використовувати задля програмування вбудованих засобів?
У який спосіб можна визначити час формування МК певного інтервалу?
Напишіть програму керування (включення/відключення) певним об’єктом. Включення об’єкта відбувається формуванням сигналу логічної 1 на виводі 7 порту А, а відключення – формуванням сигналу логічного 0 на тому ж самому виводі. Включення відбувається при надходженні сигналу зовнішнього переривання, а відключення через певний час затримки, який формується за допомогою багатофункціонального таймераMFT.