

Особенности: дем-105 датчики-реле давления для автоматизации дизельных установок судов и тепловозов
− работоспособны при температуре от минус 60 до плюс 80 °С;
− виды климатических исполнений: УХЛ2 - для макроклиматических районов с умеренным и холодным климатом; 02 - для всех макроклиматических районов на суше. ОМ5 - для макроклиматических районов с морским климатом;
− для подсоединения к прибору внешних электрических цепей служат сальниковый электрический ввод или соединитель;
− степень защиты корпуса - IP64.
Приборы имеют информационную шкалу уставок без контрольных отметок и поставляются настроенными на требуемую уставку, соответствующую заказу. При необходимости могут быть перенастроены на любую уставку в пределах, указанных в табл.1.
Приборы в зависимости от заказа поставляются с зоной возврата, направленной в сторону повышения или уменьшения (относительно уставки) давления контролируемой среды.
Приборы ДЕМ105-02 с уставками в пределах от 20 до 80 кПа поставляются с зоной возврата, направленной только в сторону повышения давления контролируемой среды.
Технические характеристики ДЕМ-105 датчики-реле давления для автоматизации дизельных установок судов и тепловозов
Таблица №4
|
Условное обозначение прибора |
Пределы уставок, МПа |
Точность настройки, МПа не более |
Зона возврата, нерегулируемая, МПа не более |
Рабочее давление контролируемой среды, МПа |
||||||
|
|
от |
до |
|
|
от |
до |
||||
|
ДЕМ105-01 ДЕМ 105-01С |
20 |
200 |
±5 |
15 |
0 |
800 |
||||
|
ДЕМ 105-02 ДЕМ105-02С |
20 |
1000 |
±25 |
50 |
0 |
1500 |
||||
|
Род тока |
Напряжение, В |
Коммутируемая мощность, Вт, не более |
Ток, А |
Cos ф, не менее |
Частота, Гц |
Индуктивность, Гн, не более |
||||||||
|
|
|
|
Мин. |
Макс. |
|
|
|
|||||||
|
постоянный |
от 24 до 220 |
60 |
0,1 |
- |
- |
- |
0,5 |
|||||||
|
переменный |
127, 220 |
- |
0,1 |
6 |
0,6 |
50, 60 |
- |
|||||||
|
|
380 |
- |
0,1 |
6 |
0,6 |
50, 60 |
- |
|||||||
Таблица №5
Sn – начало алгоритма;
P1 – проверка ЗУ ( предохранитель , авт.выключатель);
A1 – запуск насоса;
P2 – проверка датчиков температуры;
A2 – подача сигнала на регулятор температуры;
P3 – сравнение температуры с Tзад;
A3 – запуск ЭП РУ;
A4 – вывод регулируемых параметров на монитор P,I;
P5 – проверка датчиков давления;
A5 – сигнал на стоп;
A6 – запуск резерва.
Выбор типа регулятора и модулирование
системы в среде MATLAB
Существую несколько методов идентификации : аналитика диф.уравнений и экспериментальный способ. Мы выбираем экспериментальный.
Метод Калмана состоит из ряда этапов:
-
В процессе эксплуатации через строго фиксированные интервалы времени записываются значения выходных параметров;
-
Выбирают наиболее простой вид аналитической модели;
-
Решают разность уравнений и сравнивают полученные динамические хар-ки с экспериментом;
-
При больших отклонениях задаются уравнения более высокого порядка и повторяют расчет.
Результаты мониторинга:
Таб.6
|
t,ч |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
12 |
38,7 |
54,9 |
64,8 |
70,7 |
74,3 |
76,6 |
77,9 |
78,7 |
80 |

Из
данных наблюдения видно что температура
изменилась с 12 до 80
 за 10 часов. Для идентификации используем
разностное уравнение первого порядка.
Для упрощения расчета примем интервал
времени измерения замеров
за 10 часов. Для идентификации используем
разностное уравнение первого порядка.
Для упрощения расчета примем интервал
времени измерения замеров
 = 2ч
= 2ч
Для минимизации суммы квадратов отклонений запишем функционал:

F=

Приравнивая к 0 частные производные от функционала получаем систему уравнений


m- точек эксперемента (4) Таб.7
|
t, ч |
0 |
2 |
4 |
6 |
8 |
|
|
- |
54,9 |
70,7 |
76,6 |
78,7 |
|
|
- |
12 |
54,9 |
70,7 |
76,6 |


Суммы необходимых значений: Таб.8
|
|
|
|
|
|
|
282 |
215 |
14139 |
16110 |
46225 |





Подставляем найденные значения в формулы и получаем значения:
 368
368


Разносное
уравнение:

Для проверки адекватности модели рассчитывают ряд значений при тех же интервалах.
Сравнивая расчитаные данные с данными эксперимента убеждаемся в адекватности модели обьекта, что позволяет сделать вывод по возможности описания обьекта диф. Уравнением первого порядка вида:

 ,
решение которого является
,
решение которого является

Q=Qn;
 ;
t
= n *
;
t
= n *
 , n=1;
, n=1;

T
=
 = 2ч
= 2ч
T – постоянная времени нагрева
Диф ур-е:

 ;
;
Данные
диф
ур-я описываются инерционным
звеном
первого
порядка: W(s) =
 ;
;
В
случаях если на обьект действует
единичное возмущение по каналу управления
от регулирующего органа, то
 обьекта определяется отношением:
обьекта определяется отношением:

Как правило для получения К , регулирующий орган перемещают на 10% хода.


Примем
транспортное запаздывание
 , тогда передаточная функция обьекта
будет иметь вид:
, тогда передаточная функция обьекта
будет иметь вид:

Расчетам имитационную модель САР с двумя видами регуляторов:
1)выбираем ПИ- регулятор с 20% перерегулированием


Получим следующие значение настроек:


Апробация САР на имитационной модели ( одноконтурная САР с обратной связью) в программе MatLab
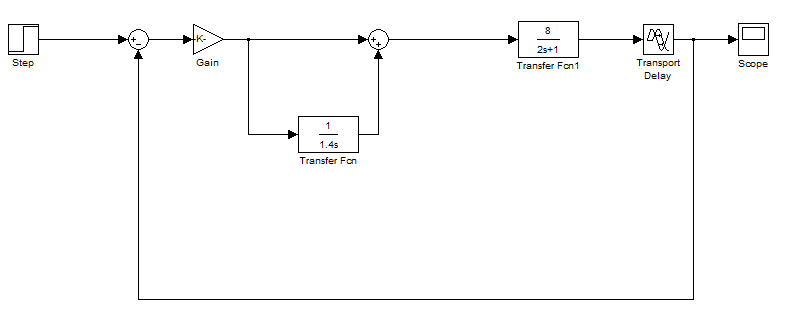
Переходный процесс:

Таким образом, проведена динамическая идентификация, рассчитаны и апробированы на модели настройки ПИ-регулятора для САР температуры масла в теплообменнике.
2) Выбор П- регулятора с 20% перерегулированием

Получим следующие значение настроек:

Апробация САР на имитационной модели ( одноконтурная САР с обратной связью) в программе MatLab
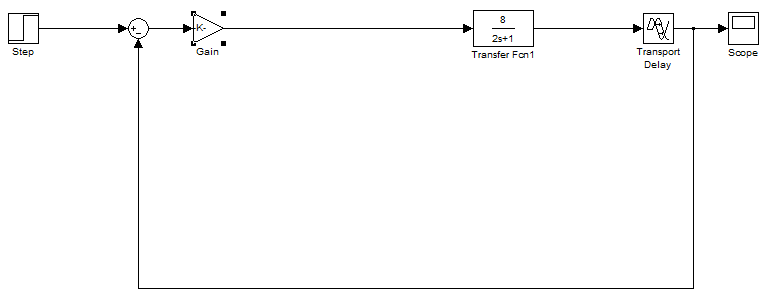
Переходный процесс:

Таким образом, проведена динамическая идентификация, рассчитаны и апробированы на модели настройки П -регулятора для САР температуры масла в теплообменнике.
Заключение
В данном курсовом проекте была подробно рассмотрена система регулирования температуры масла. Данная система имеет место на судах. Так же была произведена автоматизация системы с помощью различных приборов с измерительными и управляющими функциями. Были разработаны функциональная и принципиальная схемы САР регулирования температуры масла в теплообменнике. Выведен алгоритм работы данной системы. Проведена динамическая идентификация, рассчитаны и апробированы настройки для нескольких регуляторов в среде программы “Matlab”.
Список литературы:
-Власенко А.А., Стражмейстер В.А. Судовая электроавтоматика. Учебник для вузов. –М:, 1983.-368с.
-В.И. Ланчуковский А.В. Козьминых Автоматизированые системы управления судовими дизельными и газотурбинными установками. 1990. – 334с.
- Луковцев В.С. Конспект лекций.