

Введение .
Краткое описание проектируемого судна и его режимов работы .
Технико-экономическое обоснование выбора рода тока, напряжения и частоты .
Составление и расчет таблицы нагрузок судовой электростанции по режимам работы судна .
Выбор количества и мощности главных и резервных генераторов - технико-экономическое обоснование .
Расчет мощности и выбор аварийного генератора .
Выбор системы распределения электроэнергии по судну - технико- экономическое обоснование .
Выбор и описание схемы и конструкции ГРЩ .
Выбор защитной аппаратуры и электроизмерительных приборов ГРЩ.
Расчет и выбор кабеля питания для приёмника .
Мероприятия по электробезопасности и пожарной безопасности
при обслуживании электрических станций и сетей .
12. Список используемой литературы .
1. ВВЕДЕНИЕ
Важным направлением совершенствования морского транспорта является обновление флота, пополнение его высокопроизводительными экономичными специализированными судами. Современные морские суда насыщены большим количеством технических средств, обеспечивающих безопасность плавания, оптимальные режимы работы оборудования и нормальные бытовые условия экипажа. Для управления СТС применяют системы управления, которые в совокупности образуют комплексы систем управления судовыми техническими средствами.
Судовые электроэнергетические системы представляют собой сложный комплекс технических средств, задачей которого является производство и распределение электроэнергии.
Судовые специалисты, занимающиеся эксплуатацией таких систем и электроэнергетических установок, должны оперативно принимать решения в условиях изменяющихся условий эксплуатации, смены режимов отдельных агрегатов и автоматических устройств. Эти обстоятельства обусловливают повышение требований к уровню профессиональной подготовки судовых электромехаников с целью обеспечения надежной работы технических средств и живучести судна в целом.
Одна из основных тенденций развития судовой электроэнергетики - постоянный рост мощностей СЭС и установленного электрооборудования. Так, средняя мощность СЭС морских судов удваивается каждые 20 лет и в настоящее время достигает десятков тысяч киловатт. По мере роста мощностей СЭС усложнялась их структура, а также структура электрических сетей, совершенствовались системы автоматического регулирования, управления, защиты и контроля. В связи с этим сформировалось понятие о СЭЭС, обеспечивающей производство и распределение электрической энергии.
Управление работой СЭЭС осуществляют с помощью СУ. В настоящее время на транспортных судах используют множество СУ СЭЭС, отличающихся структурой, элементной базой и другими признаками. На судах отечественной постройки устанавливают СУ СЭЭС типа мИжора-Мм, связанную с локальной системой ДАУ ДГ типа "Роса-М".
Применение этих двух систем позволило автоматизировать операции пуска, остановки, контроля и защиты приводных двигателей ГА ("Роса-М"), синхронизацию, распределение нагрузки и защиту генераторов (мИжора-Мм). Тем самым обеспечена комплексная автоматизация СЭС.
Система «Ижора-М» обеспечивает автоматические пуск и подключение резервного ДГ при увеличении текущей нагрузки до 90% номинальной, а также при обесточивании шин ГРЩ. При этом система автоматически распределяет активную нагрузку пропорционально мощности агрегатов с последующим отключением схемы распределения нагрузки с выдержкой времени около 1 мин. На длительных режимах нагрузка работающих ДГ определяется их статическими характеристиками. В случае совместной работы дизель- и турбогенератора (ТГ) процесс распределения нагрузки осуществляется корректором регулятора частоты вращения турбо генератора с обеспечением не менее 30 %загрузки ДГ .
Более совершенные СУ СЭЭС, в которых используются ЭВМ, позволяют дополнительно автоматизировать программирование работы СЭЭС в соответствии с режимом работы судна, а также диагностирование и прогнозирование состояния элементов СЭЭС. Такие СУ обеспечивают практически бесперебойное, снабжение судна электроэнергией, что является важнейшим условием безопасности плавания.
Разработка и внедрение надежных СУ СЭЭС в значительной степени будут способствовать решению важной задачи - созданию комплексных систем управления СТС, которые свяжут в единое целое основные группы судовых технологических процессов: судовождение, эксплуатацию СЭУ, грузовые, швартовные операции и др. Такие СУ СТО уже в настоящее время создаются на базе широкого использования ЭВМ и телевизионной техники.
В зависимости от объема автоматизации СТС, Правила Регистра устанавливают 3 знака автоматизации в символе класса судна - Al, А2 или A3:
А1 - судно, за исключением пассажирского, объем автоматизации механической установки которого позволяет эксплуатацию без вахты в машинных помещениях и в центральном посту управления;
А2-судно, объем автоматизации механической установки которого позволяет эксплуатацию без вахты в машинных помещениях, но с вахтой в центральном посту управления;
A3-судно с мощностью главных механизмов до 2250 кВт,
объем автоматизации механической установки которого сокращен, но позволяет эксплуатацию без вахт в машинном отделении .
2. Краткое описание проектируемого судна и его режимов работы
2.1. В конце 60-х гг. на морском транспорте появился новый метод перевозки грузов в специальной таре, которая называется контейнером.
Эта универсальная упаковка дает большую экономию труда во время перевозки; при стандартных размерах контейнеров и при соответствующем оборудовании судов обеспечивается очень быстрая погрузка и разгрузка и наиболее рациональное использование трюмов судна.
Оборудование судна для перевозки контейнеров состоит главным образом в том, что в трюмах располагают направляющие из профильной стали, в которых в вертикальном положении устанавливают и закрепляют контейнеры, что исключает их горизонтальные перемещения при крене судна.
Чтобы максимально использовать грузовместимость судов, часть контейнеров транспортируется как палубный груз. Поэтому должна быть гарантирована определенная прочность контейнеров в условиях волнения на море.
Высокие скорости и большая грузоподъемность современных контейнеровозов требуют установки очень мощных двигателей. Так, контейнеровоз «Евролайнер» при ми дедвейте 28432 т и скорости 26 уз. имеет в качестве двигателя газовую турбину с номинальной мощностью 39 643 кВт и максимальной 46 336 кВт .
расположение контейнеров в ячейках с направляющими из угольников
контейнеровоз без собственных грузовых средств с двумя рядами контейнеров на палубе
поперечный разрез контейнеровоза с грузовым мостовым краном; схема перегрузки контейнера с поезда или полуприцепа
Район плавания - неограниченный, знак автоматизации: А2.
2.2. Режимы работы судна (судовой электростанции )
В данном курсовом проекте рассчитана нагрузка судовой электростанции для пяти режимов работы судна (электростанции):
стоянка без грузовых операций;
стоянка с грузовыми операциями;
ходовой режим;
маневрирование;
аварийный с сохранением работоспособности основной электростанции.
Рассмотрим некоторые особенности каждого из режимов применительно к транспортному судну. Эти же особенности характерны и для остальных типов судов.
В ходовом режиме не работают: якорно-швартовные устройства (брашпиль, шпиль, автоматические швартовные лебедки), грузовые устройства (лебедки и грузовые краны ), шлюпочные лебедки, главный компрессор, валоповоротное устройство и др.
В работе постоянно находятся: рулевое устройство, насосы, обслуживающие главные и вспомогательные двигатели (топливные, охлаждающие пресной и забортной воды, масляные), вентиляторы машинного отделения, трюмов и общесудовые, насосы питательной воды и циркуляционные котельной установки, система кондиционирования, камбуз (в течение рабочего дня), рефрижераторная установка, освещение (кроме палубного), радиооборудование, электрорадионавигационные приборы и др.
Нагрузка рулевого устройства невелика (25...30% ) вследствие малых кладок пера руля при работе авторулевого.
Периодически (эпизодически) включаются: вспомогательный компрессор (для восполнения утечек воздуха в системе пуска главного двигателя), пожарный насос (для скатки палубы), осушительный (для удаления предварительно очищенной при помощи сепараторов воды, образовавшейся вследствие утечек на деки в машинном отделении и трюмах), насосы общесудовых систем пресной и забортной воды (при понижении давления воды в этих системах) и др.
При необходимости работает электрооборудование мастерских.
В режиме маневров, например, при съемке с якоря (работает главный двигатель), к перечисленным выше постоянно и эпизодически работающим приемникам добавляются якорно-швартовные устройства, вместо подкачивающего компрессора пускового воздуха работает более мощный компрессор (из-за повышенного расхода воздуха вследствие частых пусков-остановок главного двигателя).
Одновременно повышается нагрузка на рулевую машину вследствие увеличения углов кладки пера руля. Работает пожарный насос для смыва грунта с якоря и якорь-цепи.
В зависимости от конкретных условий съемки, может быть включено палубное освещение, необходимое при укладки стрел лебедок и кранов по-походному, зачехлению палубних механйзмов, и при очистке палубы после окончания грузовых операций.
В аварийном режиме (пожар или пробоина, или иные обстоятельства, влияющие на безопасность мореплавания) судовая электростанция наиболее нагружена при пожаре на судне.
В этом случае следует принять, что борьба с пожаром происходит на ходу судна (в штормовых условиях остановка главного двигателя всегда приводит к тому, что неуправляемое судно разворачивается лагом к волне и опрокидывается). Поэтому работают все приемники электроэнергии ходового режима, и дополнительно включаются пожарные насосы, а также насосы осушительной и балластной систем.
Пожарные насосы необходимы для борьбы с пожаром, а осушительные насосы - для удаления забортной воды, поступающей в судовые помещения вследствие тушения пожара, насосы; балластной системы - для создания безопасного для судна крена и дифферента, т.е. для сохранения остойчивости судна.
В зависимости от расположения очага пожара, должны выключаться механизмы, продолжение работы которых способствует распространению пожара. Например, при пожаре в машинном отделении должны быть выключены вентиляторы МО.
При пожаре в трюмах должны выключаться трюмные вентиляторы, при пожаре в жилых и служебных помещениях - вентиляторы этих помещений или установка кондиционирования воздуха, подающая воздух в эти помещения и т.д.
При необходимости оставления судна используются шлюпочные лебедки.
В данном курсовом проекте следует принять, что пожар случился в одном из трюмов и борьба с пожаром происходит на ходу судна (работают приемники ходового режима) в темное время суток (включено палубное освещение ).
В режиме стоянки с грузовыми операциями не работают: рулевое и якорно- швартовное устройства, насосы, обеспечивающие работу главного двигателя (топливный, охлаждающие пресной и забортной воды, масляный), радиооборудование, электрорадионавигационные приборы, главный компрессор.
В работе находятся: грузовые устройства, палубное освещение, подкачивающий компрессор, насосы, обеспечивающие работу вспомогательных двигателей (тоцливный, охлаждающие пресной и забортной воды, масляный), уменьшенное количество вентиляторов машинного отделения, трюмные и общесудовые вентиляторы, насосы питательной воды и циркуляционные котельной установки, система кондиционирования, камбуз (в течение рабочего дня), рефрижераторная установка.
При необходимости может включаться валоповоротное устройство и
электрооборудование мастерской.
В режиме стоянки без грузовых операций не работают грузовые устройства, а все остальные приемники электроэнергии, перечисленные для режима стоянки с грузовыми операциями, остаются в работе.
Дополнительные сведения об особенностях работы отдельных приемников можно найти в приводимых примерах «Таблиц нагрузок судовой электростанции» из справочной и методической литературы . .(JI.2. стр. 44-47).
3. ТЕХНИКО-ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ ВЫБОРА РОДА ТОКА, НАПРЯЖЕНИЯ И ЧАСТОТЫ.
Основные параметры СЭЭС:
Род тока - переменный
Частота - 50 Гц
Напряжение - 380В
3.1 Род тока
Решающим фактором для выбора рода тока являются требования, предъявляемые судовыми приемниками электроэнергии: электроприводами, электронагревательными приборами, электроосвещением, приборами управления и т.д.
Род тока СЭС определяется родом тока подавляющего большинства приемников. Немногие приемники другого рода тока в этом случае будут получать питание через преобразователи. Для электронагревателей и освещения с использованием ламп накаливания род тока не имеет значения. Для работы приборов управления судном - машинных и рулевых указателей, использующих сельсины - необходим переменный ток. Его также удобнее использовать для питания радиостанции и радионавигационных приборов. При переменном токе полную характеристику рода тока определяют по его частоте, а иногда и по форме кривой напряжения. Помимо этого необходимо знать систему напряжения на выводах источников электроэнергии.
В настоящее время на судах используется в основном переменный ток, частотой 50Гц, это позволяет унифицировать оборудование. На скоростных судах широко применяется постоянный ток, но использование переменного тока с частотой 400Гц, весьма перспективно, т.к. позволяет уменьшить габаритные размеры и массу электрооборудования и стоит дешевле, а это важно для судов на подводных крыльях и воздушной подушке.
На проектируемом судне применяют 3-фазный переменный ток.
3.2 Частота тока
Частота переменного тока на большинстве судов составляет 50 Гц, а на некоторых судах иностранной постройки - 60 Гц. Переход на повышенную частоту позволяет снизить массу и размеры СЭО. Так, при частоте 400 Гц суммарная масса и размеры всех элементов СЭЭС вместе с приемниками электроэнергии в 2-3 раза меньше, чем при частоте 50 Гц. Поэтому СЭЭС повышенной частоты (400 Гц) используют на судах, где массогабаритные показатели являются решающими, - это суда на подводных крыльях и воздушной подушке.
Повышение частоты СЭЭС транспортных судов проблематично по ряду причин. Электрические машины, трансформаторы и электромагнитные аппараты при частоте 400 Гц по сравнению с частотой 50 Гц создают более высокий уровень шума и радиопомех, имеют большую стоимость и меньшую надежность. Опыт эксплуатации АД при частоте 400 Гц и с частотами вращения 6000 и 8000 об/мин показал, что упомянутые АД не могут быть использованы для большой группы судовых электроприводов с частыми пусками (грузовых лебедок, кранов и др.). Это объясняется увеличением времени разгона до номинальной частоты вращения и высокими температурными напряжениями в АД при разгоне.
На проектируемом судне используется частота 50 Гц
3.3. Напряжение
Номинальное напряжение на выводах источников электроэнергии предназначено для питания судовой сети, не должно превышать следующие значения: 0,4кВ (400В) - при трехфазной системе переменного тока; 0,23кВ (230В) - при однофазной системе переменного тока; 230В - при постоянном токе. На некоторых специальных судах и судах технического флота для электроприводов большой мощности допускается применение трехфазной системы напряжения до ЮкВ
Напряжение выбрано 380 В как наиболее безопасное.
3.4. Качество электроэнергии.
Род тока СЭС определяется родом тока подавляющего большинства приемников. Немногие приемники другого рода тока в этом случае будут получать питание через преобразователи. Для электронагревателей и освещения с использованием ламп накаливания род тока не имеет значения. Для работы приборов управления судном - машинных и рулевых указателей, использующих сельсины - необходим переменный ток. Его также удобнее использовать для питания радиостанции и радионавигационных приборов. Электродвигатели постоянного тока с асинхронными электродвигателями при одном и том же токе развивают большой пусковой момент, и позволяет более простыми способами регулировать частоту вращения. Эти двигатели обычно используют для привода механизмов с частыми пусками при большом начальном сопротивлении. В этом случае основное число электродвигателей на судне составляют двигатели постоянного тока. Постоянный ток имеет не только положительные качества, но и свои недостатки. В условиях влажности постоянный ток снижает качество электроизоляции. В сетях, где протекает постоянный ток, появляются блуждающие токи и токи утечки, предвещающие коррозию.
При переменном токе полную характеристику рода тока определяют по его частоте, а иногда и по форме кривой напряжения. Помимо этого необходимо знать систему напряжения на выводах источников электроэнергии.
В своем курсовом проекте я выбираю переменный ток из-за того, что СЭЭС дает возможность: преобразовать напряжение с помощью трансформаторов; разделять СЭЭС с помощью трансформаторов на отдельные электрические не связанные друг с другом части силовой и осветительной сети; получать электроэнергию от береговой сети без преобразователей; повысить уровень унификации судового электрооборудования с электрооборудованием общего применения .
4. СОСТАВЛЕНИЕ И РАСЧЕТ ТАБЛИЦЫ НАГРУЗОК СУДОВОЙ ЭЛЕКТРОСТАНЦИИ ПО РЕЖИМАМ РАБОТЫ СУДНА.
Судовые приемники электроэнергии в соответствии с назначением разделяются по вертикали таблицы на следующие группы:
Средства судовождения и связи (радиостанция, РЛС).
Палубные механизмы (шпиль, брашпиль, швартовные лебедки, краны, грузовые лебедки, траповые лебедки). Механизмы энергетической установки. Механизмы и устройства судовых систем.
Бытовые механизмы и устройства (камбуз, кипятильники, подогреватели воды). Прочие потребители. В зависимости от специфики работы судна, приемники электроэнергии могут быть разбиты на группы, имеющие другое наименование.
4.1 ЗАПОЛНЕНИЯ ТАБЛИЦЫ НАГРУЗОК Графа 1.
Порядковый номер приёмника электроэнергии. Графа 2.
Все приемники электроэнергии, установленные на судне Графа 3.
Количество однородных приемников, n (шт.).
Графа4
Единичная установленная (номинальная) мощность приемника электроэнергии (Рн)
Графа 5.
Номинальный К.П.Д.
электродвигателя
![]()
Графа 6.
Номинальный
коэффициент мощности электродвигателей
(Cos![]() )
)
Графа 7.
Единичная
потребляемая мощность. Рп.ед.=
Рн
/
![]() н
(кВт)
н
(кВт)
Графа 8.
Общая потребляемая
мощность. Рп.общ.=
Рн
*
![]() (кВт)
(кВт)
Первые восемь граф заключают в себе данные, общие для всех режимов. Последующие графы заполняются для различных режимов работы судна. Графа 9.
Коэффициент одновременности (Ко). Коэффициент одновременности представляет собой отношение числа работающих в данном режиме приемников энергии к общему их числу. Значения коэффициентов одновременности для потребителей определяются на основании опыта работы на судах, а также из справочной и методической литературы (JI1. стр. 38-42, Л.2. стр. 97-104 и др.) Например, для единичного потребителя всегда Ко = 1/1 = 1
В то же время особо ответственные и ответственные судовые механизмы и устройства резервируются. На каждом судне установлено 2 рулевых электропривода.
В ходовом режиме работает один из них, поэтому коэффициент одновременности Ко = 1/2.
В режиме же маневрирования, особенно когда судно проходит узкости, работают оба электропривода, поэтому коэффициент одновременности для этого режима Ко = 2/2 = 1 .
Резервируются насосы главного двигателя - по два топливных, масляных, пресной и забортной воды, поэтому в ходовом режиме работает по одному из них и для этих насосов Ко - 172 = 0,5. Для режимов же маневрирования, аварийного Ко = 2/2 = 1.
Сказанное выше справедливо и для насосов вспомогательных двигателей (дизель- генераторов).
Графа 10.
Коэффициент загрузки (Кз). Коэффициент загрузки представляет собой отношение фактически потребляемой мощности приемником энергии в данном режиме к его номинальной мощности.
Значения коэффициентов загрузки зависят от режима работы судна и также определяются из справочной и методической литературы (Л. 8. стр. 97-104, Л.З. стр. 42).
Значения коэффициентов загрузки можно взять из приводимой ниже таблицы. В ней приведены обобщенные значения коэффициентов загрузки разных механизмов. Эти значения получены в результате эксплуатации большого числа серий судов разных типов (сухогрузные, нефтеналивные суда, универсальные и др.).
Графа 11.
Коэффициент
мощности (Cos![]() ).
Общеизвестно,
что К.П.Д. и
Cos
).
Общеизвестно,
что К.П.Д. и
Cos![]() электродвигателя
зависят от нагрузки. Эти ориентировочные
зависимости К.П.Д. и
Cos
электродвигателя
зависят от нагрузки. Эти ориентировочные
зависимости К.П.Д. и
Cos![]() от
нагрузки электродвигателей, мощностью
более 10 кВт. (кривая
I) и
мощностью до 10 кВт.
{кривая 2)
изображены на рис.4.1 см. ниже. Как видно
из рисунка, кривые К.П.Д. в пределах
нагрузок от 50% до 100% изменяются мало,
поэтому при составлении таблицы величину
К.П.Д. берут постоянной и отдельно для
каждого режима работы не определяют. А
вот коэффициент мощности
(Cos
от
нагрузки электродвигателей, мощностью
более 10 кВт. (кривая
I) и
мощностью до 10 кВт.
{кривая 2)
изображены на рис.4.1 см. ниже. Как видно
из рисунка, кривые К.П.Д. в пределах
нагрузок от 50% до 100% изменяются мало,
поэтому при составлении таблицы величину
К.П.Д. берут постоянной и отдельно для
каждого режима работы не определяют. А
вот коэффициент мощности
(Cos![]() )
в зависимости
от фактической загрузки электродвигателя
изменяется значительно, поэтому его
значения для каждого режима работы
необходимо определять, пользуясь
графиком
(см. приложение 12-2).
)
в зависимости
от фактической загрузки электродвигателя
изменяется значительно, поэтому его
значения для каждого режима работы
необходимо определять, пользуясь
графиком
(см. приложение 12-2).
^
Рис.
4.1. Зависимость коэффициента полезного
действия
а) для
двигателей мощностью до 10 кВт;
б) для
двигателей мощностью 10...75 кВт
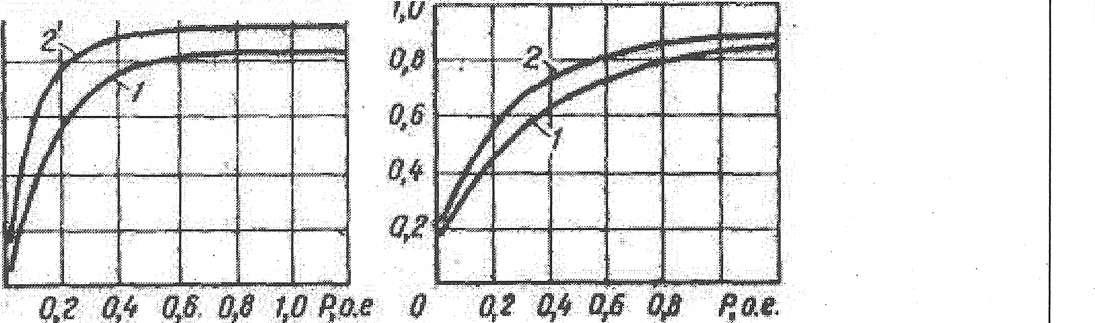
![]() (кривые
1 ) и коэффициента мощности
cos
(кривые
1 ) и коэффициента мощности
cos![]() (кривые
2 ) асинхронных двигателей от коэффициента
его загрузки Кз (мощности
(кривые
2 ) асинхронных двигателей от коэффициента
его загрузки Кз (мощности
![]() выраженной в относительных единицах
о.е):
выраженной в относительных единицах
о.е):
![]()
![]()
Графа 12.
Активная потребляемая мощность. Ра = Рп.общ * Ко * Кз, (кВт)
Графа 13.
Реактивная
потребляемая мощность. Qp
= Pa
tg![]() (кВ-Ар)
(кВ-Ар)
где tg![]() - определяется
по таблицам тригонометрических функций
на основании Cos
- определяется
по таблицам тригонометрических функций
на основании Cos![]() режима.
режима.
Примечание:
при заполнении данной графы необходимо
помнить, что
для электронагревательных приборов и
осветительных приборов Cos![]() =1и
они реактивной мощности не имеют.
=1и
они реактивной мощности не имеют.
На каждый режим работы судна для каждого приемника электроэнергии приходится по пять граф (гр. 9-13), которые заполняются аналогично. (14-18,19-23,24- 28,29-33)
Для приемников, не работающих в данном режиме в соответствующих графах построчно делается прочерк.
Кроме того, длительность работы приемников электроэнергии в любом режиме может быть произвольной и, конечно, неодинаковой. Кратковременно работающие приемники (например, гидрофоры, компрессор хознужд, валоповоротное устройство) могут не учитываться в нагрузке электростанции. Эта нагрузка служит лишь проверкой на возможные перегрузки генераторов и обеспечивается кратковременными перегрузочными способностями ГА с учетом возможности отключения на это время отдельных второстепенных приемников энергии.
Поэтому мощности приемников энергии, работающих кратковременно или эпизодически, условно выделяются шрифтом. Эти условия, однако, не относятся к аварийному и маневренному режимам, где нагрузки в скобках, как правило, не должно быть.
Заполнив построчно всю таблицу по режимам, приступают к заполнению горизонтальных строк итоговой таблицы.
Горизонтальные строки итоговой части таблицы заполняются следующим образом:
Первая строка («А») - Суммарная активная и реактивная потребляемые мощности приемников электроэнергии без учета нагрузки в скобках. Определяется путем сложения активных и реактивных мощностей приемников работающих в этих режимах, и заносятся в графы 12 и 13 {а также в соответствующие графы других режимов).
Вторая строка («В») - Суммарная активная и реактивная потребляемые мощности приемников энергии с учётом нагрузки в скобках. Определяется аналогично.
Третья строка («С») - Суммарная активная и реактивная потребляемые мощности приемников энергии без учета нагрузки в скобках, но с учетом общего коэффициента одновременности по режиму. Определяется умножением соответствующих мощностей на принятый коэффициент одновременности по режиму и заносятся в графы 12,13, 17, 18, 22, 23, 27, 28, 32, 33.
Общий коэффициент одновременности по режиму (Кор) учитывает несовпадение максимумов нагрузок приемников энергии во времени, т.к. нельзя считать реальным совершенно одновременную работу всех приемников. Опыт показывает, что величина этого коэффициента колеблется в пределах 0,6-1,0. При этом в более напряженных режимах он ближе к 1,0, а в менее напряженных - ближе к 0,6.
Можно рекомендовать следующие средние значения коэффициентов одновременности по режимам :
Стоянка без грузовых операций 0,7 - 0,75
Стоянка с грузовыми операциями 0,8
Съёмка с якоря (или маневрирование).. 0,75 - 0,8
Ходовой режим 0,8-0,9
Аварийный режим . 0,9 - 1,0
Указанные значения коэффициентов одновременности по режимам подлежат уточнению для каждого типа судна.
Т.о. суммарная мощность, потребляемая в каждом режиме (без учёта нагрузки в скобках), умножается на принятый коэффициент одновременности по режиму и заносится в соответствующие графы (12, 13 и им соответствующие по режимам).
Четвертая строка («В») - Суммарная потребляемая мощность с учётом коэффициента одновременности по режиму (третья строка С) и с учётом 5% потерь мощности в сети.
Определяется умножением соответствующих значений третьей строки на коэффициент 1,05.
Пятая строка («Е») - Полная мощность (S). Определяется по формуле
![]()
где Ра и Qp - соответствующие значения активной и реактивной мощности четвертой строки.
Шестая
строка («F»)
-
Средневзвешенный коэффициент мощности
(cos![]() cp)
по каждому
режиму. Определяется по формуле
cp)
по каждому
режиму. Определяется по формуле
![]()
где Ра - активная мощность приемников, кВт.
S - полная мощность приемников кВА.
Седьмая строка («G») Количество и мощность работающих генераторов.
На основании полученных расчетных величин суммарной потребляемой мощности по всем режимам с учетом коэффициентов одновременности и потерь в сети производится выбор единичной и суммарной мощности генераторных агрегатов судовых электростанций.
Если величина средневзвешенного коэффициента мощности по режиму получается равной или больше номинального коэффициента мощности генераторов, предполагаемых к установке, то выбор генераторов производят по суммарной активной потребляемой мощности. Если же величина средневзвешенного коэффициента мощности по режиму получается меньше номинального коэффициента мощности генераторов, предполагаемых к установке, то их выбор производят по полной (кажущейся) потребляемой мощности.
При этом следует
учесть, что для большей части серий
генераторов отечественной постройки
(МСК, МСС, ГСС, ГМС, 2СН)
cos![]() =
0,8.
=
0,8.