

Вопросы и задания
1. Поясните устройство и принцип действия синхронных микромашин с постоянными магнитами.
2. Поясните вид МХ двигателя с постоянными магнитами.
3. Поясните устройство гистерезисного двигателя и его работу при синхронной частоте вращения.
4. Поясните вид асинхронной МХ гистерезисного двигателя.
4.23 Шаговые двигатели
В системах автоматики чаще вращательного необходимо поворотное движение вала на заданный угол. Такое движение обеспечивают шаговые двигатели (ШД).
Статор ШД содержит четное число катушек, которые создают сосредоточенные магнитные поля требуемой ориентации в пространстве (рис.4.39,а). Назначением статора состоит в формировании множества дискретно направленных векторов магнитного поля статора.
Ротор ШД выполняется всегда явнополюсным. Конструктивно он может состоять либо из радиально расположенных постоянных магнитов (рис.4.36,а), либо иметь явно выраженные полюса без обмоток, как у синхронно-реактивного двигателя (рис.4.34,а) при резком отличии индуктивных сопротивлений xd и xq (рекомендуемое неравенство xd>3xq).
На примере ШД с восемью катушками рассмотрим принцип формирования дискретно направленных векторов магнитного поля статора (рис.4.39,а). Угол между соседними катушками составляет 45о. Поля катушек направлены по их осям.

Варианты питания катушек:
1. Питание подводится только к одной из катушек (рис.4.39,а). Повороты целые, равные углу между катушками, и составляют 45о.
2. Питание подводится только к парам соседних катушек (рис.4.39,б). Повороты дробные, равные 45о, но сдвинутые на 22,5о относительно поворот в предыдущем питании статора. Суммарное поле в 1,85 раз больше поля каждой из катушек. Это позволяет получить на валу ШД увеличенный вращающий (поворачивающий) момент.
3. Питание подводится только к трем соседним катушкам (рис.4.39,в). Повороты целые, равные углу между катушками, и составляют 45о. Суммарное поле в 2,4 раз больше поля каждой из катушек. Это позволяет получить на валу ШД увеличенный вращающий (поворачивающий) момент.
4. Питание подводится то к одной из катушек, то к парам соседних катушек. Повороты дробные, равные половине угла между катушками, и составляют 22,5о. Суммарное поле то номинальной, то в 1,85 раз больше поля каждой из катушек.
5. Питание, чередующееся так, как показано на рис.4.39,г. Повороты дробные, равные одной трети угла между катушками, и составляют 15о.
Характеристиками вращающего момента ШД являются либо угловая характеристика СД (рис.4.17), либо угловая характеристика синхронно-реактивного двигателя (рис.4.34,в).
Качество работы ШД оценивается статическими и динамическими погрешностями отработки угла поворота вала, который обозначим как α (рис.4.40).
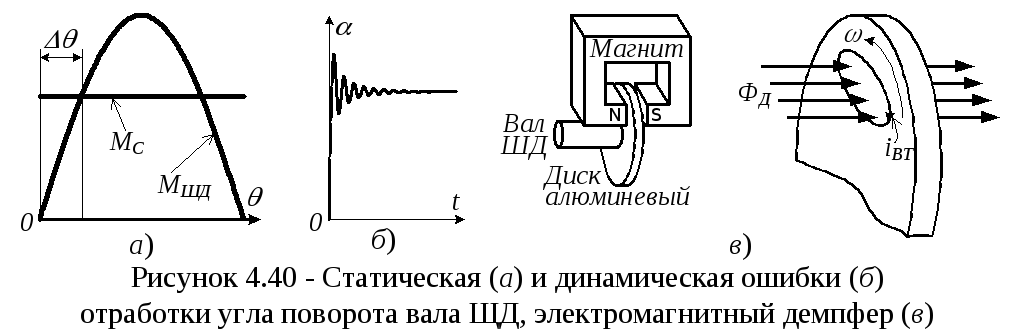
Статическая ошибка Δα оценивается по расхождению угла поворота ротора ШД от заданных алгоритмом включения его обмоток (рис.4.39). Для ненагруженного ШД ошибка Δα=0. У нагруженного моментом МС ШД ротор отклоняется на угол Δθ (рис.4.40,а) возникает ошибка Δα=Δθ. Для уменьшения этой ошибки нельзя перегружать ШД сверх момента, указанном в паспорте на ШД. ШД с магнитами имеют меньшую статическую погрешность, чем ШД типа синхронно-реактивного двигателя.
Динамические ошибки ШД связаны с однократным поворотом и с непрерывным вращением ротора.
При однократном повороте в новом положении возникают затухающие колебания ротора (рис.4.40,б). Для подавления колебаний к ротору подсоединяют демпферные устройства как механического, так и электрического типа. Электромагнитный демпфер (рис.4.40,в) представляет собой магнит, внутри которого вращается присоединенный к валу ШД диск из немагнитного материала (алюминия). Диск можно рассматривать как бесконечное множество замкнутых контуров, плотно прилегающих друг к другу. При быстром вращении диска на участке колебаний вала ШД в контурах индуктируются вихревые токи iВТ, которые при взаимодействии с полем магнита создают тормозящую силу, которая направлена навстречу ускоренному вращению ротора.
В режиме непрерывного вращения с большой частотой переключений катушек статора ШД (4...5 кГц) возникает угловое отставание ротора от поля статора. Для уменьшения этой погрешности нужно уменьшать момент инерции ротора и подключенной к нему механической нагрузки. Для уменьшения момента инерции ротора ШД его выполняют в виде тонкостенного стакана, к наружной части которого прикреплены постоянные магниты.