

Вопросы и задания
1. Поясните схемы пуска СД, отметив их достоинства и недостатки.
2. Как СД можно использовать для компенсации реактивной мощности индуктивного характера в сети?
4.20 Синхронный компенсатор.
Синхронно-реактивный двигатель
Синхронным компенсатором (СК) называется СД, используемый по альтернативному назначению – компенсации реактивной мощности в сети. Этот вариант использования СД отразился на конструкции СД, а именно, у СК вал ротора не выводится наружу, он исполняется небольшого сечения, подшипники и корпус - облегченные.
СК вводится в работу так же, как и СД (рис.4.31). Регулирование емкостного тока достигается в режиме перевозбуждения СК (рис.4.32).Положительные эффекты при использовании на предприятии СК иллюстрируются рис.4.33.
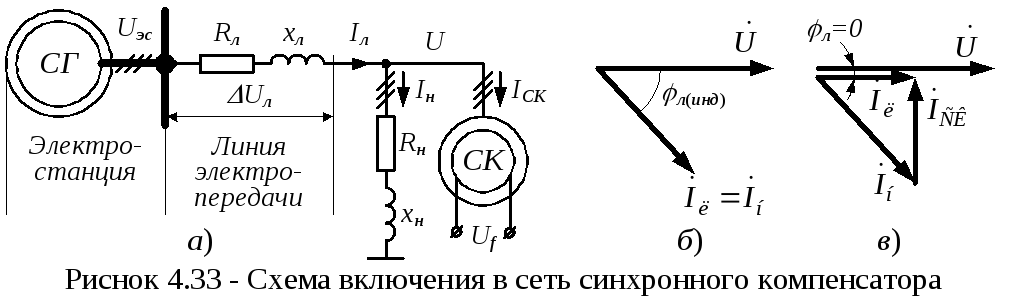
В сети без СК ток Iл
в линии электропередачи совпадает с
током нагрузки Iн
и отстает от напряжения U
на угол φн(инд)
(рис.4.33,б). На сопротивлении линии Rл+jxл
теряется напряжение величиной
![]() ,
из-за чего напряжение U
на нагрузке меньше напряжения Uэс
на электростанции. Кроме того, в активном
сопротивлении Rл
линии теряется мощность
,
из-за чего напряжение U
на нагрузке меньше напряжения Uэс
на электростанции. Кроме того, в активном
сопротивлении Rл
линии теряется мощность
![]()
В сети с СК ток Iл
в линии электропередачи равен только
активной составляющей тока нагрузки
Iна=Iнcosφн
(рис.4.33,в). На сопротивлении линии Rл+jxл
теряется напряжение
![]() ,
которое меньше, чем в схеме без СК и,
значит, напряжение на нагрузке U
напряжения выше. Кроме того, в сопротивлении
Rл
линии уменьшается мощность потерь
,
которое меньше, чем в схеме без СК и,
значит, напряжение на нагрузке U
напряжения выше. Кроме того, в сопротивлении
Rл
линии уменьшается мощность потерь
![]()
Использование СК вместо косинусных конденсаторов для компенсации реактивной мощности выгоднее по следующим причинам:
1. СК занимают для установки меньшие площади здания.
2. СК нечувствителен к помехам в сети, в то время как косинусные конденсаторы в сети с помехами могут не только выйти из строя, но могут и взорваться.
3. С помощью СК можно путем регулирования напряжения возбуждения Uf просто изменять ток компенсации IСК, что необходимо в случае изменения величины реактивного тока Iнр=Iнsinφн нагрузки.
Синхронно реактивный двигатель (СРД) представляет трехфазную машину без обмотки возбуждения, у которого вращающий момент является синхронно-реактивным (второе слагаемое формулы (4.29) синхронного момента СД). Устройство СРД приведено на рис.4.34,а.

Токами обмоток статора создается вращающееся магнитное поле с параметрами:
- напряженность (намагничивающая сила) Нст магнитного поля статора;
- частота вращения ωст магнитного поля статора.
Ротор с частотой ω вращается в сторону, что и поле статора, причем ωст>ω. При вращении поля и ротора изменяется ориентация оси ротора относительно оси поля статора, что влияет на величину индуктивности Lcm обмоток статора. Если ось ротора перпендикулярна к оси поля (близкое к указанной ориентации занимает ротор, изображенный сплошной линией), то на пути потока существует большой воздушный зазор и, следовательно, индуктивность статора минимальна - Lcm.min. Если ось ротора параллельна оси поля (близкое к указанной ориентации занимает ротор, изображенный пунктирной линией), то на пути потока существует малый воздушный зазор и, следовательно, индуктивность статора максимальна - Lcm.mах. Налицо периодические изменения индуктивности Если ось ротора перпендикулярна к оси поля (близкое к указанной ориентации занимает ротор, изображенный сплошной линией), то на пути потока существует большой воздушный зазор и, следовательно, индуктивность статора минимальна - Lcm при вращении ротора.
Установленное изменение индуктивности служит причиной появления вращающего момента СРД. Рассмотрим СРД как систему, к которой извне (из сети) подводится энергия и носителем энергии является электрический ток I статора (рис.4.34,б). Используем определения энергии магнитного поля катушки в виде
![]() ,
,
где ток I пропорционален напряженности Нст обобщенного магнитного поля статора, полученного суммирование напряженностей трех катушек статора, а механической энергии вращательного движения в виде Wмех=М·α (α - угол поворота вала СРД).
Так как Нст имеет постоянную величину (поле только вращается), то нужно считать ток обобщенным током статора и, значит, постоянной величиной.
Полая энергия СРД равна сумме энергий Wмех и Wмп. Так как СРД по отношению к сети является автономной замкнутой системой, к которой нет другого, чем из сети, подвода энергии и потребляемый из сети обобщенный ток постоянен, то изменения полной энергии СРД в любой момент времени нулевое:

Из полученной формулы видно, что вращающий момент СРД пропорционален скорости изменения индуктивности статора Lcm.
Формула угловой характеристики СРД, полученная без учета активного сопротивления обмотки Ra статора имеет такой же вид как и формула синхронно-рективного момента у явнополюсного СД (рис.4.34,в):
![]()
При учете активного сопротивления обмотки Ra статора графики механических характеристик сдвигаются влево (рис.4.34,в).
Достоинства СРД:
- обеспечивает постоянство частоты вращения независимо от нагрузки;
- дешевизна, надежность и большой срок службы.
Недостатки СД:
- малый коэффициент мощности – cosφ<0,5;
- низкий к.п.д. - η<0,7.