

Вопросы и задания
1. Какие существуют способы частоты вращения ДПТ и каковы критерии качества процесса регулирования?
2. Поясните способ реостатного регулирования частоты вращения ДПТ. В чем его достоинства и недостатки?
3. Поясните способ якорного регулирования частоты вращения ДПТ. В чем его достоинства и недостатки?
4. Поясните способ полевого регулирования частоты вращения ДПТ. В чем его достоинства и недостатки?
3.13 Способы торможения дпт
Необходимость в электрическом торможении ДПТ обосновывается тем, что механические тормоза рассчитаны на их использование при частоте вращения не выше ≈0,2ωном.
Существуют три основных способа торможения ДПТ:
1. Противовключением.
2. Динамическое торможение.
3. Рекуперативное.
Критериями выбора способа торможения являются:
- интенсивность снижения частоты вращения;
- потери энергии при торможении.
Торможение противовключением.
Схема торможения приведена на рис.3.21,а.

Пусть ДПТ работал в двигательном режиме с параметрами, определяемые точкой 1(рис.3.21,б) и на схеме были замкнуты пара контактов1-1контактораК.Для торможения ДПТ контакты контактораКпереключаются на пару2-2. Полярность напряжения на якоре ДПТ изменяется на противоположную и двигатель с точки1на МХ двигательного режимаМДВс частотой холостого ходаω0Ескачком переходит в точку2на МХ тормозного режимаМТс частотой холостого хода -ω0Е. Переход осуществляется практически мгновенно при неизменной частоте вращения:ω2=ω1. Далее по характеристикеМТДПТ снижает частоту вращения. В точке3ДПТ остановится и если его не отключить от питания, то он развернется в противоположную сторону. Чтобы не допустить этого, необходимо на подходе к точке3отключить питание двигателя и наложить механический тормоз.
Для ограничения тока на уровне предельно допустимого IЯ.тахв тормозном режиме в цепь якоря включается ограничительное сопротивлениеRогр.
При рассмотренном способе торможении развивается максимальны тормозной момент, что способствует быстрому снижению частоты вращения. Двигатель достигает нулевой частоты вращения за конечное время. При торможении теряется энергия в ограничительном сопротивлении Rогр.
Динамическое торможение.
Схема торможения приведена на рис.3.22,а.
Пусть ДПТ работал в двигательном режиме с параметрами, определяемые точкой 1(рис.3.22,б) и на схеме были замкнуты пара контактов1-1контактораК.Для торможения ДПТ контакты контактораКпереключаются на пару2-2. Якорь ДПТ отключается от питания и замыкается на тормозное сопротивлениеRДТ. МХ ДПТ в режиме динамического торможения описывается выражением
![]() (3.33)
(3.33)
График МХ МДТпроходит через начало координат.
Переход с МДВнаМДТосуществляется практически мгновенно при неизменной частоте вращения:ω2=ω1. Далее по характеристикеМДТДПТ снижает частоту вращения. В точке0ДПТ остановится и может развернуться в обратную сторону, если нагрузка ДПТ активная (например, в двигательном режиме груз поднимался, а после остановки груз может развернуть ДПТ в обратном направлении). Чтобы не допустить этого, необходимо на подходе к точке3отключить питание двигателя и наложить механический тормоз.

Для ограничения тока на уровне предельно допустимого IЯ.тахв тормозном режиме в цепь якоря включается сопротивлениеRДТсоответствующей величины.
При рассмотрен способе торможении развивается довольно большой, но меньший чем при противовключении тормозной момент, что способствует быстрому снижению частоты вращения. Двигатель достигает нулевой частоты вращения за конечное время. При торможении теряется энергия в ограничительном сопротивлении RДТ.
Рекуперативное торможение.
Схема торможения приведена на рис.3.23,а. Видно, что силовая часть такая же, как и при работе в двигательном режиме, например, при якорном регулировании (рис.3.19).
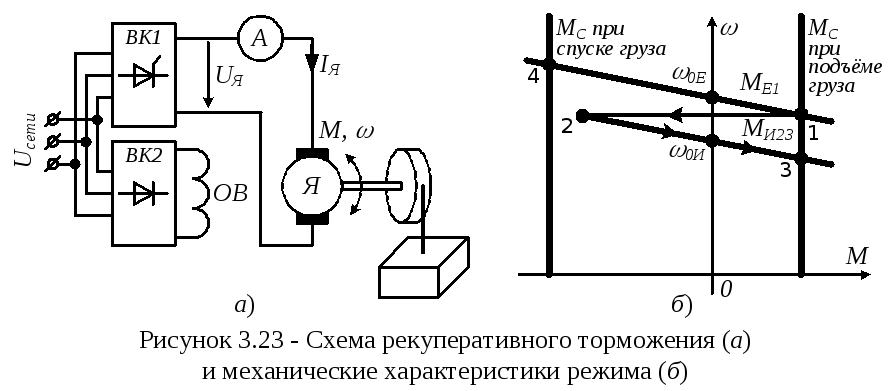
Режим рекуперативного торможения рассмотрим на примере электропривода крана, который может как поднимать, так и опускать груз.
При подъеме груза режим рекуперативного торможения возникает в случае понижения частоты вращения ДПТ скачкообразным уменьшением якорного напряжения UЯ. ДПТ при неизменной частоте вращения (ω2=ω1) скачком переходит с МХМЕ1на МХМИ23(рис.2.23,б). На МХМИ23частота вращенияω2оказывается большей частоты холостого ходаω0И. Это значит, что э.д.с.Едвигателя становится больше приложенного к нему напряженияUЯ. Ток двигателяIЯизменит направление на противоположное и ДПТ превратится в ГПТ. Энергия, выдаваемая ГПТ, рекуперируется (возвращается) в сеть черезВК1. ДПТ тормозится до частотыω0Ис рекуперацией энергии в сеть. Далее до точки3двигатель тормозится подвешенным грузом.
При спуске груза режим рекуперативного торможения возникает в случае, когда груз, преодолев момент сопротивления в механической части привода, разгоняет ДПТ дальше сверх частоты холостого хода ω0Е. Такой на графике МХМЕ1является точка4. ДПТ переходит в режим генератора с возвратом энергии в сеть.
Способ рекуперативного торможения самый выгодный в энергетическом плане, так как энергия торможения возвращается в сеть.