

Вопросы и задания
1. Поясните принцип изменения числа пар полюсов в полюсопереключаемом АД.
2. Покажите, что при изменении числа пар полюсов обмотки статора искажаются графики магнитных потоков фазных обмоток.
3. Почему о полюсопереключаемых АД понижается вращающий момент?
4. Почему о полюсопереключаемых АД понижается к.п.д.?
2.18 Способы торможения ад
Существуют три основных способа торможения АД:
1. Противовключением.
2. Динамическое торможение.
3. Рекуперативное.
Критериями выбора способа торможения являются:
- интенсивность снижения частоты вращения;
- потери энергии при торможении.
Необходимость в электрическом торможении АД обосновывается тем, что механические тормоза рассчитаны на их использование при частоте вращения не выше 0,2ωном.
1. Торможение противовключением.
Схема торможения приведена на рис.2.29,а. До торможения АД был подключен к сети контактором КВ(работа с вращением вперед). Нагруженный на момент сопротивленияМСнагрузки АД работал с частотой, соответствующей точке1(рис.2.29,б), и развивал двигательный момент.

Для торможения контактор КВотключается и одновременно включается контакторКН(назад), которым изменяется порядок подключения двух фазВиСАД к сети (можно изменять порядок подключения любых двух фаз АД). Магнитное поле статора АД изменяет направление вращения на противоположное и АД скачком по траектории1-2переходит на МХМН(ω) вращения назад. АД снижает частоту вращения по траектории2-3, и если его не отключить от сети после прохождения нулевой частоты вращения (полной остановки АД) он разгонится в обратную сторону по участку4-5.Для недопущения обратного вращения нужно в интервале частот между точками3и4АД отключить от питания и наложить механический тормоз. По условиям эксплуатации правильно выбранных механических тормозов их нужно накладывать при снижении частоты до20%от номинальной частоты вращения АД.
В начале торможения по обмоткам статора АД протекает большой ток противовключения IПВ=(6...8)I1ном. Однако этот ток не намного больше пускового тока равногоIП=(5...7)I1ном. Поэтому реально токIПВне представляет опасности для АД.
Торможение происходит интенсивно с большим темпом снижения частоты, мощность торможения выделяется в виде тепла в обмотках АД.
2. Динамическое торможение.
Схема торможения приведена на рис.2.30,а. До торможения АД был подключен к сети контактором КР(работа). Нагруженный на момент сопротивленияМСнагрузки АД работал с частотой, соответствующей точке1(2.30,б), и развивал двигательный момент.
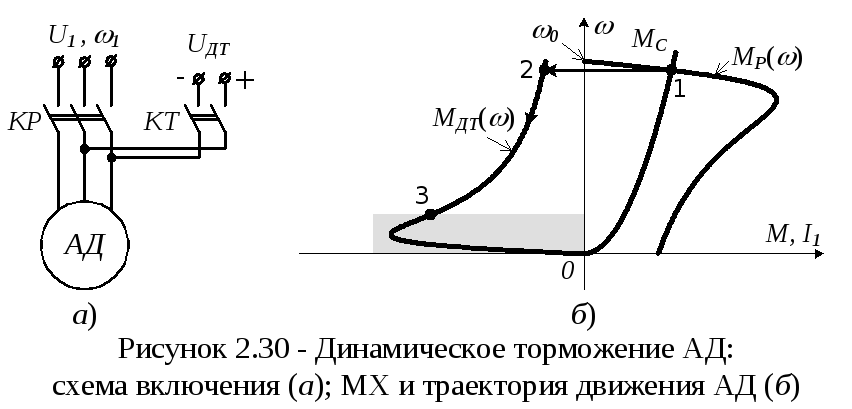
Для торможения контактор КРотключается и одновременно включается контакторКТ(торможения), которым на два любых вывода АД подается постоянное напряжениеUДТвеличиной (0,25...0,4)U1ном. АД снижает частоту вращения по траектории2-3. Точка3выбирается такой, чтобы в ней частота вращения АД не превышала20%от номинальной частоты. В точке3АД отключается от напряженияUДТи накладывается механический тормоз. Мощность торможения выделяется в виде тепла в обмотках АД.
Недостатком способа динамического торможения в том, что требуется применения в схеме электропривода источника постоянного напряжения.
3. Рекуперативное торможение.
Рекуперативное торможение возникает тогда, когда по какой-либо причине частота вращения АД становится больше синхронной частоты ω0. Такое возникает в двух случаях:
- при опускании груза, когда АД вращается в ту же сторону, в какую груз разгоняет двигатель (рис.2.31,а) и двигатель тормозит груз, не давая грузу неограниченно увеличивать частоту вращения АД;
- когда скачком уменьшается частота ω1выходного напряжения ПЧ, от которого получает питание АД (2.31,б).

При опускании тяжелого груза (рис.2.31,а) с МХ нагрузки МС2(рис.2.31,в) частота вращения АДωувеличивается сверх синхроннойω0. В результате относительная частота вращения магнитного поля статора к ротору, равнаяω0-ω(2.16) становится отрицательной, и, значит, поле вращается навстречу вращениюωротора.В соответствии с принципом действия АД (рис.2.3), на ротор, перемещающийся в поле статора, действует сила, которая направлена в ту же сторону, в которую вращается поле. Для АД это является тормозным моментомМТГ, который тормозит спускаемый груз на скорости, опеределяемой точкой2(рис.2.31,в). Фаза токаI1изменится на180опо отношению сетевому напряжениюU1и, если в двигательном режиме АД (при частотах0<ω<ω0) электрический фазовый сдвиг был0<φ<90о, и из сети потреблялась активная мощностьP=3U1I1cosφ>0, то на тормозном участке (при частотахω0<ω) активная мощность станет отрицательной:P=3U1I1cos(φ+180o)=-3U1I1cosφ<0. АД не потребляет активную мощность из сети, а, наоборот, отдает ее в сеть. Описанное явление возврата в сеть энергии торможения, называетсярекуперацией энергии.
При скачкообразном понижении сигнала ωзадзадания частотыω1питающего АД напряжения (рис.2.31,б) его МХ скачком переходит в МХМПЗс расположением, показанным на рис.2.31,в. Следует скачкообразный переход1-3на тормозной участок МХМПЗ. АД тормозится до синхронной частотыω0с рекуперацией энергии торможения в сеть. Далее частота вращенияωАД понижается до точки4, являющейся точкой пересечения МХМПЗ(ω) иМС1.
Рекуперативное торможение является самым выгодным в энергетическом плане – энергия торможения возвращается в сеть.