

МИНИСТЕРСТВО АГРАРНОЙ ПОЛИТИКИ И ПРОДОВОЛЬСТВИЯ УКРАИНЫ
Керченский Государственный Морской Технологический Университет
Кафедра “Судовождение”
КУРСОВАЯ РАБОТА
по дисциплине: Технические средства судовождения
(вариант № 5)
Выполнил:
студент группы СВ-52
Першко Н.П.
Шифр:
12КСВ1155
Руководитель:
ассистент
Нагибин И.А.
Курсовая работа предоставлена на проверку _________________2012 г.
Курсовая работа допущена к защите ________________________2012 г.
Курсовая работа защищена с оценкой_______________________2012 г.
г. Керчь
2012 г.
Исходные данные
|
φ |
V узл |
ГКК1 |
ГКК2 |
Δt |
tоб |
L |
A12 |
tΔгк |
ИПС |
|
7N |
15 |
290 |
25 |
140 |
2000 |
9.4 |
92 |
110 |
93 |
Раздел I
Расчет суммарной инерционной погрешности ГАК «Вега»

 = -0,03303рад/с = -1,89286град/с
= -0,03303рад/с = -1,89286град/с
По формулам (2.110) стр. 84:
 ;
;
 ;
;
 ;
;
По формулам (3.105-107) на стр.156:
 ;
;
Tиг
=
60c
 m=0,02565c-1
n=0,0003877c-1
q=0,001507 c-1
m=0,02565c-1
n=0,0003877c-1
q=0,001507 c-1
Тогда
 0,001165(c*м-1);
0,001165(c*м-1);
 (c*м-1)
(c*м-1)

Найдем коэффициенты Е1, Е2 и Е3:
Е1 = 0,551090757(с2м-1);
Е2 = -0,01707714(с2м-1);
Е3 = 0,005170132(с2м-1).
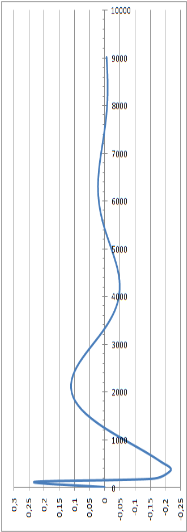
Подставив значения коэффициентов, получаем зависимость:

|
δj |
t |
δj |
t |
|
0 |
0 |
-0,044545986 |
4500 |
|
0,231192627 |
110 |
-0,037717501 |
4680 |
|
-0,163298959 |
180 |
-0,029034763 |
4860 |
|
-0,218728074 |
360 |
-0,01937096 |
5040 |
|
-0,183302404 |
540 |
-0,009556898 |
5220 |
|
-0,138487848 |
720 |
-0,000326083 |
5400 |
|
-0,089430218 |
900 |
0,007725958 |
5580 |
|
-0,040257552 |
1080 |
0,014167031 |
5760 |
|
0,005437986 |
1260 |
0,018738433 |
5940 |
|
0,044785193 |
1440 |
0,021351175 |
6120 |
|
0,075748713 |
1620 |
0,022070344 |
6300 |
|
0,097168213 |
1800 |
0,021090298 |
6480 |
|
0,108728806 |
1980 |
0,018703688 |
6660 |
|
0,110873823 |
2160 |
0,015267363 |
6840 |
|
0,104673784 |
2340 |
0,011168047 |
7020 |
|
0,091666825 |
2520 |
0,006790317 |
7200 |
|
0,073685884 |
2700 |
0,002488904 |
7380 |
|
0,052686961 |
2880 |
-0,001433224 |
7560 |
|
0,030590795 |
3060 |
-0,004740156 |
7740 |
|
0,009147731 |
3240 |
-0,007271469 |
7920 |
|
-0,010167415 |
3420 |
-0,008944058 |
8100 |
|
-0,026226746 |
3600 |
-0,009748115 |
8280 |
|
-0,038286144 |
3780 |
-0,009738292 |
8460 |
|
-0,045989406 |
3960 |
-0,009021327 |
8640 |
|
-0,049343623 |
4140 |
-0,007741496 |
8820 |
|
-0,048671337 |
4320 |
-0,006065225 |
9000 |
Раздел II.1
Оценка возможной погрешности определения места судна
В произвольном удобном масштабе на плане наносим ориентир О1 и строим относительно его ориентир О2 по азимуту А12 и расстоянию L .
Прокладываем на плане обратных компасных пеленгов ориентиров ОГКП1 и ОГКП2
пересечение которых дает точку М1 (точку положения судна выбраню произвольно)
Используя график суммарной инерционной девиации δi, полученный в разделе 1,
на момент времени tоб находим величину суммарной инерционной погрешности δi(tоб) .

Рассчитываем значения истинных пеленговИП1 и ИП2, исправляя значения ГКП1 и ГКП2
по формуле:
ИП = ГКП + δi(tоб)
ИП1= 215.4° + 0,11° =215.51°; ИП2= 181.3° + 0,11°=181.41°
На плане прокладываем обратные истинные пеленги ориентиров ОИП1 и ОИП2 и получаем
истинное место судна М2.
Оценить погрешность, допущенную в данном определении места судна, выразив в
линейных единицах (милях) расстояние между точками М1 и М2. ( определяем в соответствии с масштабом графических построений)
r = 0,3 мили = 3 кабельтовых