

Nauchnaya_rabota_(1)
.pdf21
Формула для определения момента инерции двигателя с диском на ва-
лу имеет вид:
|
|
J |
|
|
1 |
m (R2 R 2 ) , |
(4.9) |
|
дв |
|
|||||||
|
|
|
2 |
|
1 |
|
||
|
|
|
|
|
|
|
||
где m – масса диска, кг; |
|
|
|
|
|
|
||
R – внешний радиус диска, м; |
|
|
|
|
|
|||
R1 – внутрений радиус диска, м. |
|
|
|
|||||
J äâ |
1 |
0,00734 (0,042 |
0,00752 ) 6.078 10 6 |
êã ì 2 . |
||||
|
||||||||
2 |
|
|
|
|
|
|
|
|
С целью определения коэффициента вязкого трения - Te и механическую по-
стоянную двигателя - C M для системы уравнений (4.10) был проведен эксперимент, схема которого изображена на рис. 4.7.
Рисунок 4.7 – Схема эксперимента для определения параметров двигателя
В ходе эксперимента на 9-й секунде ключ SA1 замыкался, на 21-й – размыкался. Графики напряжения двигателя Uдв и напряжения шунта Uш,
соответствуещие процессам разгона и выбега приведены на рис. 4.8.

22
Рисунок 4.8 – Графики напряжений двигателя и шунта
При Lя=0 схема замещения имеет вид, приведенный на рис. 4.9
Рисунок 4.9 – Схема замещения
Схема замещения показаная на рис. 4.9 описывается системой уравнений (4.10)
23
|
|
|
|
|
|
|
E - ε |
|
|
|
|
|
I = |
|
|
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
R ш + R я |
+ RSA1 |
|
||||||||
|
|
|
ε = Ce |
ω; |
|
|
|
|||||
|
|
M |
|
|
|
= CM |
I; |
|
||||
|
|
дв |
(4.10) |
|||||||||
|
|
|
|
= Te ω; |
||||||||
|
|
|
M |
c |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
dω |
= Mдв Mc ; |
|
||||||||
J |
|
|
||||||||||
|
dt |
|
|
|||||||||
|
U |
|
= ε + R |
|
I, |
|
||||||
|
дв |
|
я |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|||
где I - ток в цепи якоря;
E- ЭДС источника питания;
- ЭДС двигателя;
RШ , RЯ , RSA1 - сопротивления шунта, якорной цепи и выключателя;
M ДВ , M С - момент двигателя и момент сопротивления;
- угловая скорость вращения двигателя; J дв - момент инерции двигателя с диском.
Данная система уравнений (4.10) внесена в среду Microsoft Excel, неиз-
вестные параметры системы уравнений Te , C M определены путем подбора
значений с помощью внешнего периферийного пульта, до визуального сход-
ства с рис. 4.8. Численные |
значения составляют |
T 9.36 10-7 |
, |
|||
|
|
|
|
|
e |
|
CM 0.006145 Н.м/А. |
|
|
|
|
|
|
Определение суммарного момента инерции двигателя с дебалансом |
|
|||||
J |
|
J |
дв |
m l 2 , |
(4.11) |
|
|
|
д |
|
|
||
где mд – масса дебаланса, кг;
J дв - момент инерции двигателя, кг.м2;
l – расстояние от центра до дебаланса.
J |
6.078 10 6 |
0.001963 0.0352 |
8.489 10 6 êã ì 2 . |

24
Сопротивление якорной цепи определено с помощью мультиметра
DT700D и составляет 7.7 Ом для первого двигателя и 8.3 Ом для второго. Для моделирования принимаем средние значение, равное Rя=8 Ом.
Эксцентриситет дебаланса определен из тел поиска координаты центра тяжести
xц.б. |
mi xi |
, |
|
mi |
|||
|
|
где mi и xi - масса и координата i-го элемента.
Приняв за начало отсчета ось вращения диска получим
mд l ,
mд mдиск
что в численном виде соответствует
|
0.002 0.034 |
|
7.31 10 3 м . |
|
0.002 0.0073 |
||||
|
|
|||
(4.12)
(4.13)
Таблица 4.3 – Параметры лабораторного стенда
Название |
Обозначение |
Значение |
Размерность |
|
|
|
|
Коэффициент упругости |
Сx |
5173.4 |
Н.м |
|
|
|
|
Коэффициент затухания |
Kx |
2.457 |
|
Масса подвижной платформы |
m |
0.248 |
кг |
|
|
|
|
Сопротивление якоря |
RЯ |
8 |
Ом |
|
|
|
|
Механическая постоянная двигателя |
СM |
0.006145 |
Н.м/А |
|
|
|
|
Конструктивный коэффициент двигателя |
Сe |
0.00577 |
В.с |
Момент инерции двигателя |
Jдв |
8.489.10-6 |
кг.м2 |
Суммарный момент инерции |
J∑ |
8.489.10-6 |
кг.м2 |
Коэффициент вязкого трения |
Te |
9.36.10-7 |
|
Эксцентриситет |
|
7.31.10-3 |
м |
25
5 ИМИТАЦИОННАЯ МОДЕЛЬ ДВУХ ДЕБАЛАНСНЫХ ВИБРОПРИ-
ВОДОВ, РАСПОЛОЖЕННЫХ НА ОДНОЙ ПОДВИЖНОЙ ПЛАТ-
ФОРМЕ С УЧЕТОМ МОМЕНТА, ОБУСЛОВЛЕННОГО ДВИЖЕНИЕМ ОСИ ВРАЩЕНИЯ НЕУРАВНОВЕШЕННОГО ТЕЛА
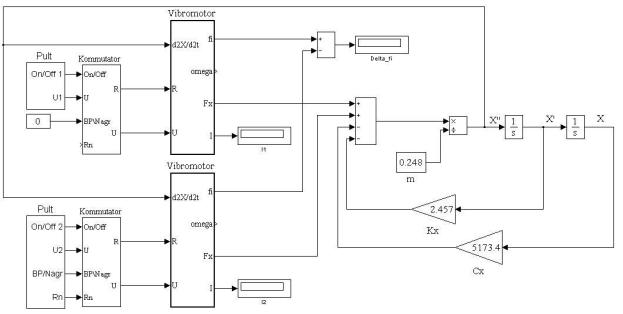
Имитационная модель, основанная на математическом описании (3.3) и
экспериментально определенных параметрах (таблица 4.3) приведена на рис 5.1.
Рисунок 5.1 – Имитационная модель совместной работы двух дебалансных виброприводов
Основными функциональными частями являются: механическая часть,
виброприводы (Vibromotor) и устройство управления (Pult, Kommutator). Мо-
дель дебалансного вибропривода, основанного на (3.1) приведена на рис 5.2.

26
Рисунок 5.2 – Имитационная модель дебалансного вибродвигателя
Модель функционального блока Kommutator, преобразующего управ-
ляющие воздействия оператора в изменение параметров и координат элек-
трической части вибродвигателя приведена на рис 5.3.
Рисунок 5.3 – Модель задатчика входных параметров
Управляющие воздействия оператора вводятся в модель с помощью внешнего периферийного устройства, подключенного к USB-порту (функ-
циональный блок Pult, рис. 5.1). Следует отметить, что предложенная имита-
ционная модель полностью адаптирована для подключения к ней системы управления (имеется в виду вход U функционального блока Vibromotor,
рис 5.1).

27
6 РЕЗУЛЬТАТЫ ФИЗИЧЕСКОГО ЭКСПЕРИМЕНТА И МАТЕМАТИ-
ЧЕСКОГО МОДЕЛИРОВАНИЯ
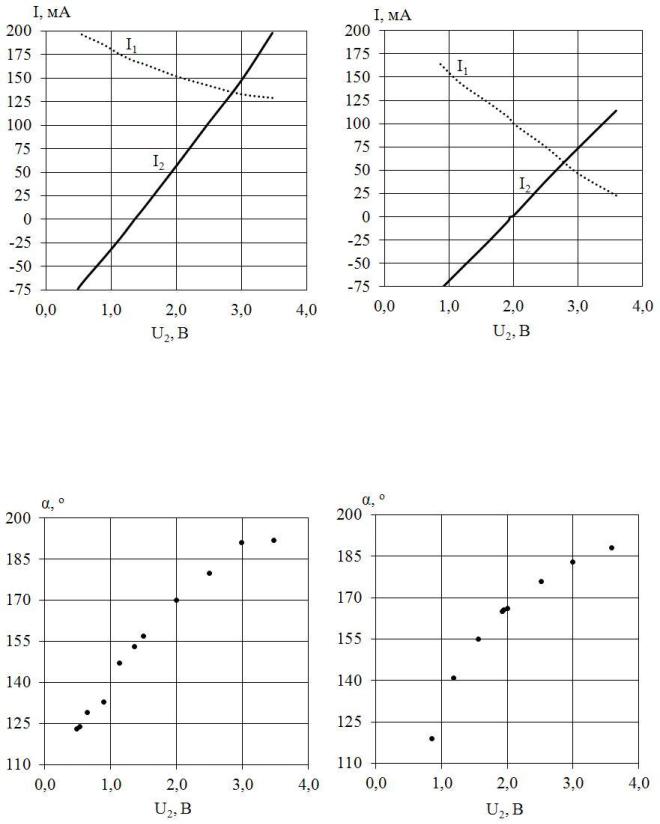
С целью подтверждения адекватности имитационной модели проведе-
ны идентичные по сути математический и физический эксперименты. Для находящихся в режиме синхронизма двух дебалансных виброприводов при варьировании напряжения питания U2 фиксировались токи I1, I2 и разность углов поворота дебалансов α. Результаты экспериментов приведены в таблице 6.1 и на графиках (рис 6.1, рис 6.2).
Таблица 6.1 – Результаты экспериментов
|
Физический эксперимент |
|
|
Математическое моделирование |
|
|||||
U1,В |
I1, мA |
U2,В |
I2, мA |
α, град |
U1,В |
|
I1, мA |
U2,В |
I2, мA |
α, град |
DT700D |
DT700D |
B7-40/4 Щ4313 |
Фото |
|
|
MatLab Simulink |
|
|||
|
|
|
|
|
|
|||||
2,77 |
129 |
3,47 |
198 |
192 |
2,79 |
|
23 |
3,59 |
114 |
188 |
2,76 |
133 |
2,99 |
147 |
191 |
2,79 |
|
47 |
2,99 |
73 |
183 |
2,75 |
142 |
2,50 |
103 |
180 |
2,79 |
|
74 |
2,52 |
40 |
176 |
2,73 |
152 |
2,00 |
57 |
170 |
2,79 |
|
100 |
2,00 |
1,3 |
166 |
2,71 |
165 |
1,50 |
12 |
157 |
2,79 |
|
106 |
1,94 |
0 |
166 |
2,70 |
168 |
1,36 |
0 |
153 |
2,79 |
|
107 |
1,92 |
-4 |
165 |
2,70 |
175 |
1,14 |
-20 |
147 |
2,79 |
|
125 |
1,56 |
-30 |
155 |
2,68 |
185 |
0,90 |
-40 |
133 |
2,79 |
|
143 |
1,18 |
-56 |
141 |
2,67 |
193 |
0,65 |
-60 |
129 |
2,79 |
|
165 |
0,85 |
-79 |
119 |
2,66 |
197 |
0,53 |
-70 |
124 |
|
|
|
|
|
|
2,66 |
198 |
0,49 |
-74 |
123 |
|
|
|
|
|
|
Срыв синхронизации
Анализ зависимостей токов от напряжения U2 показал, что математиче-
ская модель отражает качественную картину взаимосвязей, обусловленных процессами передачи энергии между дебалансными вибродвигателями и платформой. Количественное несовпадение указанных зависимостей наибо-
лее вероятно связанно с допущениями о постоянстве коэффициента упруго-
сти и прямолинейном движении платформы вдоль одной оси, а также неуч-
тенными электрическими и механическими потерями.
28
а) |
б) |
Рисунок 6.1 – Зависимости токов от напряжения: |
|
а) физический эксперимент; |
б) математический эксперимент. |
а) б)
Рисунок 6.2 – Зависимость разности углов поворота от напряжения:
а) физический эксперимент; б) математический эксперимент.
29
ВЫВОДЫ
Предложенные для четырехдвигательного дебалансного вибропривода законы изменения углов поворота дебалансов обеспечивают регулирование как амплитуды так и направления возмущающей силы.
Разработанный лабораторный стенд позволяет наблюдать основные осо-
бенности работы дебалансных вибровозбудителей, а именно - синхро-
низацию дебалансов, вибрационное поддержание вращения и эффект Зом-
мерфельда, и может быть использован для первоначальной проверки алго-
ритмов управления.
Адекватное отражение имитационной моделью качественных зависимо-
стей основных электрических и механических координат исследуемой сис-
темы дает основания для использования полученной модели при разработке системы управления многодвигательным дебалансным виброприводом,
обеспечивающей независимое регулирование частоты, направления и ампли-
туды вибрации.
Полученный изменением напряжения питания второго двигателя диапа-
зон регулирования разности поворотов дебалансов (от 180° до 120°) состав-
ляет только треть от желаемого, следовательно, необходимы дальнейшие ис-
следования в направлении установления условий синхронного вращения де-
балансов за пределами указанного диапазона.
30
ПЕРЕЧЕНЬ ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1.Вибрации в технике: Справочник: В 6 т. – Москва: Машиностроение, 1970.
2.Вибрационные машины в строительстве и производстве строительных материалов: Справочник / Под ред. В.А. Баумана, И.И. Быховского и Б.Г. Гольдштейна. – Москва: Машиностроение, 1970.
3.Видинеев Ю.Д. Автоматическое непрерывное дозирование сыпучих материалов / Ю.Д. Видинеев. – Москва: 1974. – 120 с.
4.Карпин Е.Б. Средства автоматизации для измерения и дозирования массы / Е.Б. Карпин – М.: Машиностроение, 1971. – 469 с.
5.Спиваковский А.О. Вибрационные конвейеры, питатели и вспомогательные устройства / А.О. Спиваковский, И.Ф. Гончаревич. – М.: Машиностроение, 1972. – 328 с.
6. Потураев В.Н. Вибрационные транспортирующие машины /
В.Н. Потураев, В.П. Франчук, А.Г. Червоненко. – М.: Машиностроение, 1964.
–272 с.
7.Блехман И.И. Синхронизация в природе и технике.– Москва: Наука,
1981. – С. 49-50, 54-56.
8.Ярошевич М.П., Тимощук В.М., Силивонюк А.В. Самосинхронізація дебалансних збудників з кратними частотами обертання у вібраційних машинах з плоским рухом робочого органа // Автоматизація виробничих процесів у машинобудувані та приладобудуванні. – 2011. – № 45. – С.256262.
9.Блехман И.И. Что может вибрация?: О «вибрационной механике» и вибрационной технике.– Москва: Наука, 1988. – С. 163-171.
10.Мышкис А.Д. Лекции по высшей математике / А.Д. Мышкис – Москва: Наука, 1967. – 640 с.