

Поъемно-транспортные машины
.pdfРасчет простого ленточного тормоза Тормозной момент: M T = P D2 кгсм;
1. Величина окружной силы:
P = |
2M T |
кг; |
||||
|
D |
|||||
2. Натяжение набегающей ветви ленты: |
|
|
|
|
||
|
e fα |
|
|
|
||
Sнб = P |
|
|
, Н; |
|||
e fα −1 |
||||||
|
|
|
||||
Здесь: f - коэффициент трения обкладки ленты о шкив;
α- угол обхвата, радианы.
3.Натяжение сбегающей ветви ленты:
|
Scб |
= |
|
P |
|
, кг; |
|
e fα −1 |
|||||
|
|
|
|
|||
Натяжение Sнб |
и Sсб на концах ленты определяется по двум уравнениям: |
|||||
Sнб = Sсб еаα - |
Уравнение Эйлера; и |
Sнб |
= Sсб + F = Sсб + Р - решая их совместно |
|||
получим значения натяжений Sнб и Sсб .
4. Величина момента замыкающего груза:
Из ∑М = −Gгр l −Gя l1 + Sсб а = 0
М |
гр |
= G |
гр |
l = |
Sсб а |
−G |
я |
l η , Нм; |
|
||||||||
|
|
|
−η |
1 |
||||
|
|
|
|
|
|
|
||
Здесь: Gя - сила веса якоря электромагнита, Н;
η= 0,90 ÷0,95 - КПД рычажной системы.
5.Выбор электромагнита:
По аналогии с колодочными тормозами для выбора электромагнита используем формулу:
Рм hм k1 = Sсб ∆ η1
Здесь: ∆ = εα ; изменение длины ленты на дуге α охвата, обеспечивающее образование радиального зазора ε между шкивом и лентой при растормаживании.
6. Давление на вал и опорытормозного шкива:
Т = Sнб + Sсб векторное выражение
Расчет дифференциального и суммирующего тормозов ведется аналогично. Прочие виды тормозов, конусные, дисковые - проработать самостоятельно.
ЛЕКЦИЯ 7
ПРИВОД ГРУЗОПОДЪЕМНЫХ МАШИН
Типы и основные характеристики приводов.
Ручной привод - применяют в условиях нерегулярного использования механизма при небольших грузоподъемностях - до 20 т и небольших перемещениях.
Недостатки - малая мощность и производительность. Достоинства - невысокая стоимость машины.
40
Гидравлический привод - применяют в подъемных машинах при небольшой высоте подъема.
Достоинства - легкость регулирования скорости, компактность, эксплуатационность, надежность и легкость защиты от перегрузок и т.д.
Недостатки - высокая стоимость, низкий КПД при подъеме грузов, вес которых меньше номинального.
Находит все большее применение в подъемно-транспортном машиностроении.. Пневматический привод - применяют в подъемных машинах при малых
грузоподъемностях и небольших высотах подъема, а также в конвейерах для получения возвратно-поступательного движения.
Достоинства привода - плавная работа, возможность получения большого числа включений в час, хорошая работа при перегрузках, взрывобезопасность.
Недостатки привода - технологическая сложность изготовления деталей привода и потребность в шланге, что сокращает радиус действия передвижных машин.
Привод с паровой машиной
Применяется в железнодорожных кранах и плавучих кранах. Все механизмы приводятся в движение обычно одной машиной с помощью зубчатых передач и муфт.
Достоинства - привод надежен в эксплуатации и независим от постороннего источника энергии.
Недостатки - низкий КПД (12%), большие габариты, вес, огнеопасен, загрязняет атмосферу отходящими газами.
Привод с двигателем внутреннего сгорания - (карбюраторные, дизельные) - применяют в кранах на автомобильном, гусеничном и железнодорожном ходу.
Достоинства - аналогичные парового привода, КПД выше, чем у парового привода
(до22 ÷25% ).
Недостатки - непригодны в работе с частыми пусками и сложны в обслуживании. Дизель-электрический привод - дизель приводит в движение генератор
электрического тока.
Привод механизмов осуществляется электродвигателями.
Достоинства - значительное упрощение кинематических цепей привода механизмов, привод независим от постороннего источника энергии.
Недостатки - большие габариты и вес, высокая стоимость изготовления и эксплуатации.
Электрический привод - применяется в подавляющем большинстве подъемнотранспортных машин.
Достоинства - экономичность, безопасность в работе, легкость управления, малые габариты, постоянная готовность к работе и широкие пределы регулирования скорости.
Недостатки - применение дефицитных материалов.
Применяются электроприводы на постоянном и переменном токе. Двигатели постоянного тока значительно сложнее, тяжелее и в 2-3 раза дороже, чем двигатели переменного тока. Стоимость 1 квт/час постоянного тока выше, чем переменного.
Достоинством привода на постоянном токе является:
Малые потери при регулировании скорости ротора, возможность использования аккумулятора для питания двигателей и большой пусковой момент.
У двигателей не переменном токе наряду с большими достоинствами перед двигателями на постоянном токе, имеется и недостаток - большие потери тока при регулировании угловой скорости ротора двигателя.
В подъемно-транспортных машинах применяются в основном приводы на переменном токе - асинхронные двигатели.
41
Выбор и проверка электродвигателей привода
Электродвигатели ПТМ должны удовлетворять трем основным требованиям:
1.Отсутствие перегрева изоляции обмоток двигателя в процессе длительной эксплуатации.
2.Возможность пуска под нагрузкой и разгона механизма до установившейся скорости в заданный промежуток времени.
3.Возможность работы в условиях кратковременных перегрузок, свойственных конкретному механизму.
Выбор электродвигателя по нагреву Температура изоляции зависит от условий нагрева (мощности, развиваемой
двигателем), от условий охлаждения (режима работы) и от конструкции двигателя (его габаритов, массы, условий вентиляции).
Мощность, развиваемая электродвигателем переменна во времени. Эквивалентная среднеквадратичная (по нагреву изоляции) мощность
Nэ = |
N12τ1 + N22τ2 +K+ Nn2τn , квт |
|
τ1 +τ2 +K+τn + ∑τ0 |
Здесь: N1 , N2 KNn - мощности, потребляемые в различные периоды времени, работы; τ1 ;τ2 Kτn - продолжительность рабочих периодов;
|
Аналогичные формулы |
Мэ = |
М12τ1 + М22τ2 +K+ Мn2τn , Нм; |
|
τобщ |
I э = |
I12τ1 + I22τ2 +K+ In2τn , ампер |
|
τобщ |
Формулы применимы для определения эквивалентной мощности шунтовых двигателей постоянного тока асинхронных двигателей переменного тока, компаундных двигателей постоянного тока при величине тока I обмоток ≥ 20% компаундных и сериесных двигателей постоянного тока при I обмоток ≥ 60% I компаундных.
Режимы эксплуатации двигателей Основные режимы эксплуатации двигателей стандартизированы:
Продолжительный режим
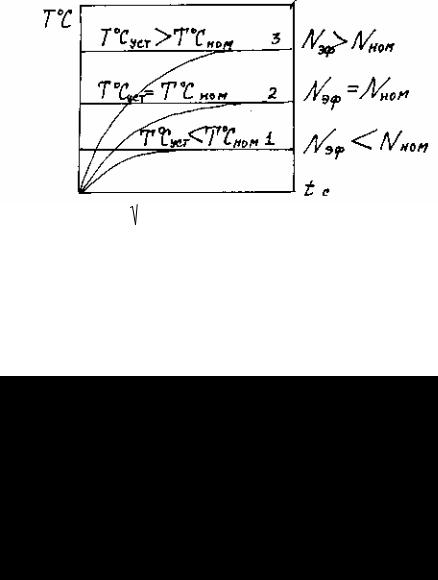
Рис. 12
При нормальной работе (кривая 2) рабочий период так велик, что установившаяся температура T 0Cуст равна номинальной - T 0Cном . При этом наступает тепловое равновесие.
42

При Nэф < Nном - двигатель недогружен, что неэкономично (кривая I) при Nэф > Nном T 0Cуст > T 0Cном изоляция перегревается и разрушается.
В этом режиме работают транспортирующие машины общего назначения.
ПВ =100%
Повторно-кратковременный режим
Кратковременные рабочие периоды длительностью tp регулярно чередуются паузами длительностью t0 . Длительность рабочего цикла
T = t p +t0 ≤10мин
Рис. 13
Нагрев изоляции двигателя здесь меньше, чем в продолжительном режиме при одной и той же мощности. Напряженность этого режима характеризуется относительной продолжительностью включения двигателя:
ПВ% = |
∑t p |
100% |
∑t p + ∑t0 |
В этом режиме работают ПТМ (краны, лебедки, завалочные машины и т.п.) Кратковременный режим
Рис. 14
Режим работы таков, что за время электродвигатель не нагревается: до установившейся температуры, а за время пауз охлаждается до окружающей среды.
(Механизмы передвижения портальных кранов, перегрузочных мостов и др.).
Режимы с частыми пусками ( до 4000 вкл/час)
43

Характеризуется повышенным нагревом двигателей ввиду работы в режиме пусковых
токов.
Іпуск = (2 ÷4)Іном
В этом режиме работают специальные ПТМ. Электродвигатели по нагреву выбирают используязависимость:
Nэф ≤ Nном
Кроме этого для всех режимов работы, кроме продолжительного, должны быть выполнены условия:
1. Для повторно-кратковременного режима:
ПВмех ≤ ПВдв
Значение ПВдв стандартизированы (15, 25, 40, 60 и 100%). Если ПВмех ≠ стандартному значению, то номинальную расчетную мощность определяют:
N |
ном. расч |
≈ N |
ном |
ПВув , квт; |
|
|
ПВмех |
2. Для кратковременного режима:
t p ≤ t р.дв
где t p - длительность непрерывной работы механизма, мин;
t р.дв -номинальная (паспортная) |
длительность непрерывной работы двигателя, |
||
мин; |
|
|
|
а номинальная расчетная мощность: |
Nном |
|
|
Nном. расч = |
|
, квт |
|
|
− |
t p |
|
|
T0 |
||
|
1 −е |
||
здесь: T0 - постоянная нагрева двигателя;
3. Для режима с частыми пусками
hм ≤ hдв
здесь: hм - число включений механизма, в течении 1 часа;
hдв - паспортное число включений двигателя, в течении 1 часа;
При использовании в этом режиме двигателей, предназначенных для продолжительного или повторно-кратковременных режимов при механическом торможении, допустимое число пусков в час:
′ |
36(ПВ% ДВ − |
ПВМЕХ ) |
|
|
|
|
|
hдв = |
Kn2 |
tn |
|
|
|
||
здесь: Kn - кратность пускового тока; tn - время пуска механизма, сек;
Метод эквивалентной мощности практически применим при проектировании машин специального назначения (когда можно составить график загрузки машины во времени).
Если же график загрузки двигателя неизвестен, то 1. При выборе двигателя для транспортирующих машин общего назначения считают
требуемую мощность постоянной и равной статической мощности Nст , а режим работы
продолжительным.
Для привода принимают электродвигатели, имеющие
Nном ≥ Nст , при ПВДВ =100%
2. Выбор двигателя для подъемных машин общего назначения: Применяют упрощенный метод выбора двигателя.
44

Статические мощности двигателя при подъеме номинального груза
Nст = QVηгр , квт;
1020 мех
Здесь: ηобщ = 0,9 ; КПД механизма; Vгр - скорость подъема груза, м/с.
По Nст из каталога выбирают двигатель и затем производят проверку его
пригодности.
Средний пусковой момент в процессе пуска:
М = Мпускmax + M пускmin , Нм пуск 2
Номинальный момент электродвигателя:
Мном = |
975Nдв |
, Нм |
|
||
Максимальный момент двигателя: |
пдв |
|
|
|
|
Мтах ≤ КпМном
Кроме этого метода, существует очень много других более или менее равноценных при выборе электродвигателя привода механизмов.
ЛЕКЦИЯ 8
ДИНАМИЧЕСКИЕ ПРОЦЕССЫ ПРИ НЕУСТАНОВИВШЕМСЯ ДВИЖЕНИИ
Основное уравнение движения
Приведение движущихся масс к одному звену (валу)
В каждом рабочем движении механизма можно наблюдать три периода:
Период пуска (разгона) - характеризуется добавочной затратой работы для преодоления инерции покоя масс механизма и груза (работа ускорения).
Установившееся движение – наступает, когда достигнута заданная скорость движения рабочего органа (барабана, ходового колеса, фермы крана и т.п.)
Период торможениядобавочная работа движущихся масс (инерция движения) поглощается тормозными устройствами.
Т.о. нагрузка да двигатель механизма в период пуска будет наибольшим.
Уравнение движения вращающегося тела
Рис. 15
Пусть тело массой m и силой веса G с моментом инерции I вращается с угловым ускорением ε .
Тогда динамический момент, вызывающий изменение скорости вращающихся масс:
45

Мдин = Іε
Вращающий момент двигателя в период пуска:
Мвр = Мс + Мдн = Мс + Iε,
Здесь: M c - момент статического сопротивления, приведенный к валу двигателя. Момент инерции тела
I = mρ2 = GD4g2 Нм с2
Здесь: ρ и D - радиус и диаметр инерции тела; g =9,81м/сек2-ускорение силы тяжести.
Тогда: уравнение движения тела:
Мдин = GD4g2 , Нм
Выражение GD2 - маховый момент тела, мера его инерции.
Приведение кинетической энергии всех движущихся масс к одному звену (обычно валу двигателя)
При этом заменяют кинетическую энергию действительной системы на кинетическую энергию эквивалентной системы, пользуясь условием постоянства живой силы, т.е. равенства живых сил или кинетических энергий приводимых систем.
Рис.16 Кинематическая схема механизма подъема 1) двигатель; 2) быстроходная муфта; 3) быстроходный вал; 4) тормоз; 5)
редуктор; 6) тихоходная муфта; 7) подшипниковая опора; 8) барабан; 9) узел неподвижных блоков; 10) крюковая подвеска; 11) стальной канат
46
Условие равенства кинетических энергий эквивалентной и действительной системы вращающихся масс:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Іпр.вр |
|
w2 |
|
|
|
|
|
Iw2 |
I |
|
|
w |
2 |
|
|
|
I |
w |
2 |
|
|
|
|
I |
n |
|
w2 |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
+ |
|
|
1 1 |
|
+ |
|
|
2 2 |
+K+ |
|
|
|
|
|
|
n |
; |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Или выражая I через GD2 : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
Іпр.вр |
w2 = |
|
GD2 w2 |
|
|
|
|
G D |
2 |
|
w2 |
|
|
n |
|
|
|
|
G |
n |
D2 w2 |
n |
n |
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
1 1 |
|
|
|
|
|
|
|
+ |
1 |
+K+ |
|
|
|
|
n |
|
|
; |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
4g 2 |
|
|
|
4g 2 |
|
|
|
|
|
|
|
4g 2 |
|
|
|
n |
|
|
|
|
|
4g 2 |
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
n |
2 |
|
|
|
|
|
|
|
|
n |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
т.к. |
|
w = w |
|
|
1 |
; w |
|
|
|
= w |
|
|
|
|
|
|
= w |
|
|
|
|
; и т.д. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
n |
|
|
|
n |
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
Тогда после сокращения получим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
GD2 пр.вр = GD2 +G D2 |
n |
|
2 |
|
+G |
|
D2 |
n |
2 |
|
|
2 |
+K+G |
|
D2 |
n |
n |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
n |
|
|
|
|
|
n |
|
|
|
|
n |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 1 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
n |
n |
|
|
|
|
|
|
||||||||||||||||||||
Здесь: Іпр.вр |
и GD2 пр.вр |
- приведенные к валу двигателя момент инерции и маховый |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
момент; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
w, I, n,GD2 - угловая скорость, момент инерции, число оборотов, маховый момент |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
всех деталей на валу двигателя (якоря, муфт м т.п.) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
w1 , w2 Kwn - угловые скорости; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
І1 |
, І2 KІn - моменты инерции; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
n1 |
, n2 Knn - числа оборотов; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
G D2 ,G |
2 |
D2 |
KG |
n |
D2 |
|
- маховые моменты |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
1 |
1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
зубчатых колес, валов и других вращающихся частей механизма (см. схему). |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Так как передаточные отношения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
i = |
n |
|
|
; i |
2 |
= |
|
|
n |
;Ki |
n |
= |
|
n |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
1 |
|
|
n1 |
|
|
|
|
|
|
n2 |
|
|
|
|
|
|
nn |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
GD2 |
|
|
= GD2 + |
G D2 |
|
|
|
|
|
|
G |
n |
D |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
1 1 |
|
+K+ |
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
i2 |
|
|
|
|
|
|
|
|
i |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
пр.вр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
но: in |
> in−1 |
>K> i2 |
> i1 , то по мере удаления звена от двигателя все более |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
уменьшается влияние звена на величину приведенного махового момента. |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Поэтому принимаем: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
GDпр2 .вр ≈ δGD2
где: δ =1.1 ÷1.25 - коэффициент, учитывающий влияние масс передаточного механизма.
Условие равенства кинетических энергий эквивалентной и действительной систем при поступательном движении масс.
Обозначим через m,Q,V массу, вес и линейную скорость поступательно движущегося
звена механизма.
Условие равенства будет иметь вид:
|
|
|
|
|
|
|
|
|
|
GD2 пр.постw |
= |
mV 2 |
|
где: GDпр2 |
|
|
|
|
|
|
|
|
4 2 |
2 |
|
||
|
|
|
|
|
|
|
|
|
|
||||
.пост - условный маховый момент эквивалентной системы. |
|||||||||||||
Так как: m = |
Q |
; а |
w = |
πn |
; то |
|
|
|
|||||
|
30 |
|
|
|
|||||||||
|
|
|
|
g |
|
|
|
|
|
|
|
||
GDпр2 |
.пост = |
365QV 2 |
|
; |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
n2 |
|
|
|
|
|
|
|
|
|
47

Т.о. Условный маховый момент системы при пуске:
GDпр2 |
.пост.пуска = |
365QV 2 |
; |
|
n2 |
||||
|
|
|
а Условный маховый момент системы при торможении:
GDпр2 |
.пост.торм = |
365QV 2 |
; |
|
n2 η |
||||
|
|
|
Суммарный приведенный маховый момент поступательно движущихся и вращающихся звеньев:
GDпр2 = GDпр2 .вр +GDпр2 .пост .
Основное уравнение движения или полный динамический момент на разгон или торможение системы, приведенной к валу двигателя:
Мдин = |
GDпр2 |
ε = |
GD2 |
|
dw |
= |
GD |
2 |
|
dn |
; |
4g |
4g |
dt |
4g |
|
dt |
||||||
|
|
|
|
|
|
|
Сдостаточной степенью точности можно считать, дин. одинаковым в процессе пуска
иторможения:
Мдин = |
GDпр2 |
|
n |
= |
GD2 пр |
|
n |
; |
|
4g η |
t |
375 |
t |
||||||
|
|
|
|
|
причем: при пуске t = tn
при торможении t = tторм
Момент двигателя при спуске затрагиваемый на преодоление статического сопротивления и сил инерции:
Мпуск = Мс + Мдин
Аналогично при торможении и опускании груза:
МТ = Мс′ + МдинТ
Здесь: МсТ - момент сил сопротивления передвижения. Для механизмов передвижения:
Мдин′ = Мс′ + МТ
т.к. момент сил сопротивления помогает торможению, действуя против вращения механизма.
а МТ = МдинТ − МсТ ;
Время пуска механизма подъема:
GD2 n
tn = 375(Мпускпр − Мс ), мин.
Время торможения механизма подъема При опускании груза:
|
|
GD2 n |
|
|
|
|
|
tтормоп |
= |
пр |
|
, мин. |
|||
375(МТ − МсТ ) |
|||||||
При подъеме груза: |
|
|
|
|
|
|
|
|
|
GD2 n |
|
|
|
|
|
tтормпод |
= |
пр |
, мин. |
||||
375(МТ + МсТ ) |
|||||||
Время пускания механизма передвижения: |
|
|
|
|
|||
|
|
GD2 |
n |
|
|
|
|
tn = |
пр |
|
|
, мин. |
|||
375(Мпуск |
+ МсТ |
) |
|||||
Время торможения механизма передвижения:
48

GD2 n
tТ = 375(МсТпр+ МТ ), мин.
Задаваясь временем tn и tm можно определять динамические моменты при пуске и
торможении и на основании этого выбирать двигатель. Самостоятельно проработать:
1.Типы и конструкции редукторов, расчет исходных данных и выбор.
2.Типы и конструкции муфт, методы выбора муфт по М.
3.Современные конструкции мостовых кранов.
ЛЕКЦИЯ 9
МЕХАНИЗМЫ ПЕРЕДВИЖЕНИЯ
Служат для перемещения груза в горизонтальной плоскости. I тип механизма:
Механизм расположен непосредственно на перемещаемом объекте (на тележке или мосту крана).
II тип механизма:
Механизм расположен отдельно от перемещаемого объекта и соединяется с ним посредством гибкого органа (каната, цепи). Это механизм передвижения велосипедных кранов, канатных дорог и т.д.
Механизмы передвижения кранов (I тип механизмов)
Мост крана и тележка крана устанавливаются на ходовых колесах. Различают приводные ходовые колеса и неприводные.
1. Механизм передвижения крана (тележки) с тихоходным валом:
Рис. 17
Здесь трансмиссионный вал собирается из отдельных секций = 2 ÷3 м, соединяемых между собой муфтами. Секции опираются на промежуточные опоры с подшипниками. Вал имеет то же число оборотов, что и ходовые колеса и передает полный крутящий момент.
49