

Регулирование скорости ад в каскадных схемах. Электрический каскад.
В
каскадных схемах регулирование скорости
ведётся за счёт введения в роторную
цепь АД добавочной ЭДС. Добавочная ЭДС
может иметь переменную величину и фазу.
Величина добавочной ЭДС определяет
уровень скорости АД, а фаза позволяет
регулировать коэффициент мощности. При
этом энергия скольжения в зависимости
от вида каскада (электрического,
электромеханического) из роторной цепи
передаётся или обратно в питающую сеть
(эл. каскад), или на вал двигателя
(эл.механич. каскад).
![]()
– изменяя Едоб.акт. можно регулировать скорость.
Регулирование фазы позволит регулировать коэффициент мощности, введение добавочной ЭДС под определённым углом позволяет регулировать и КМ.
Основной недостаток состоит в поддержании вводимой Едоб с частотой равной рабочей(f=fр), в практической реализации наибольшее распространение получили схемы введения Едоб в выпрямленную цепь ротора.
![]()

В
схеме выпрямления при введении Едоб. Ток
в роторе будет всегда отставать от Е2 и
будет пропорционален половине угла
коммутации вентилей и зависит от
нагрузки:![]()
В этой схеме ток всегда отстающий и КМ нельзя. Принцип регулирования скорости: пусть противоэдс равна нулю, цепь замкнута на коротко и двигатель работает на естественной характеристике. При введении Едоб.>Е2ротора выпрямленный мост запирается и ток в роторе становится равным нулю: МАД=0 – двигатель начинает тормозится при этом увеличивается S и увеличивается Е2, когда Евыпр.>Едоб. по роторной цепи снова начинает протекать ток и двигатель будет работать на новой мех. характеристике с новым меньшим значением скорости.
Электрический каскад:
Едоб. создаётся инвертором с помощью изменения угла инвертирования (бета).

![]()
При
Едоб. характеристика
имеет большее Sк из-за
повышенного сопротивления роторной
цепи за счёт выпрямителя, инвертора, и
РС. Уменьшение Мксвязано
с наличием выпрямительного моста, при
наличии которого ток не может одновременно
протекать по трём фазам(только по двум
фазам). Введение Едоб. эффективно
введению реактивного сопротивления в
роторную цепь. Мощность, передаваемая
из роторной цепи АД обратно в питающую
цепь, пропорциональна мощности
скольжения:
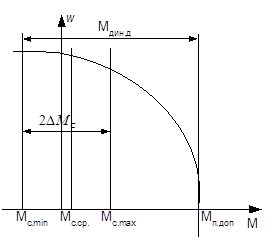
wmin– минимальная скорость в заданном диапазоне регулирования.

Мощность скольжения Рs определяет величину мощности инвертора при заданном диапазоне регулирования скорости.
Величину
момента, развиваемого АД, статорная
цепь которого питается от сети постоянного
напряжения, выражается:

![]()
т.о. каскад — регулирование скорости с постоянным моментом.
Показатели:
1) Д=8(разомкнутая система)
2) Плавность высокая
3) КПД высокий, из-за возвращения энергии скольжения обратно в сеть
4) Коэффициент мощности высокий
Применяется на компрессорных станциях, водоснабжении.
Управление скоростным режимом с помощью каскадных схем регулирования скорости ад
Принцип регулирования скорости асинхронного двигателя в каскадных схемах заключается во введении в роторную цепь добавочной ЭДС. Ток ротора в этом случае определяется разностью векторов ЭДС ротора и добавочной: изменяя величину добавочной ЭДС можно регулировать ток ротора, а, следовательно, и момент двигателя, и в конечном итоге, скорость.
Исходя из удобства практической реализации, наиболее целесообразно в цепи ротора суммировать не трехфазную переменную ЭДС, а ЭДС постоянного тока. С этой целью в цепь ротора двигателя включается выпрямитель. Источником добавочной ЭДС может служить либо машина постоянного тока (машинно-вентильный каскад), либо статический преобразователь, подключенный к питающей сети (вентильный каскад).
В АВК энергия скольжения вначале преобразуется в энергию постоянного тока, а затем инвертором АИ1 в энергию переменного тока фиксированной частоты. Трансформатор ТV1 предназначен для согласования выходного напряжения инвертора с напряжением сети. Для регулирования скорости АВК необходимо изменять величину ЭДС инвертора на стороне постоянного тока за счет изменения угла открывания тиристоров β.
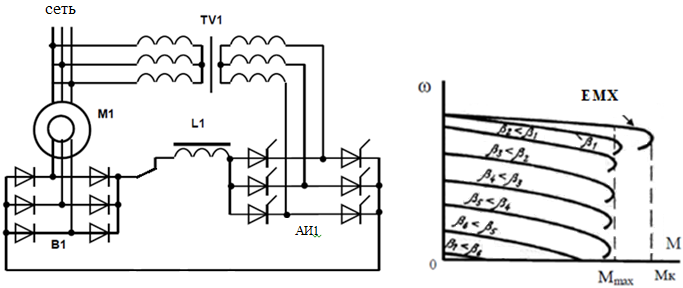
Рисунок 3.2 – Схема подключения и механические характеристики асинхронного двигателя (М1) с фазным ротором при регулировании угловой скорости схемой асинхронного вентильного каскада [11].
Таким образом, каскадные способы позволяют регулировать величину угловой скорости асинхронного двигателя в широком диапазоне, поддерживать достаточно высокую жесткость механических характеристик и отличаются возможностью возврата части энергии скольжения ротора в питающую сеть.