

Выбор численных методов для решения задач анализа
Как видно из рис. 3.2, большинство задач анализа в САПР сводится к решению систем алгебраических и обыкновенных дифференциальных уравнений.
Для решения систем нелинейных алгебраических уравненийприменяютитерационные методы. Главными показателями эффективности этих методов являются вероятность и скорость сходимости итераций к корню системы.
Наибольшей скоростью сходимости среди применяемых в САПР методов обладает метод Ньютона, основанный на линеаризации исходной системы уравнений и вычислении нового приближения к корню путем решения линеаризованной системы.
 Пример
применения метода Ньютона при нахождении
корня некоторого уравненияf (x) = 0
проиллюстрирован на рис.4.1а.
Выбрав некоторое начальное значение
аргументах0, находят уравнение
касательной к графику функцииf (x) в
точке (х0,f (x0)).
Затем ищут кореньх1этого
уравнения (абсциссу точки пересечения
касательной с осью абсцисс). Для аргументах1повторяют указанные
действия, в результате чего получают
аргументх2. С каждым последующим
шагом итерации получаемое значение
аргумента приближается к действительному
решению уравненияf (x) = 0.
Процесс завершают наi-м
шаге, когда достигают необходимой
точности определения значения корня,
т.е. когда
Пример
применения метода Ньютона при нахождении
корня некоторого уравненияf (x) = 0
проиллюстрирован на рис.4.1а.
Выбрав некоторое начальное значение
аргументах0, находят уравнение
касательной к графику функцииf (x) в
точке (х0,f (x0)).
Затем ищут кореньх1этого
уравнения (абсциссу точки пересечения
касательной с осью абсцисс). Для аргументах1повторяют указанные
действия, в результате чего получают
аргументх2. С каждым последующим
шагом итерации получаемое значение
аргумента приближается к действительному
решению уравненияf (x) = 0.
Процесс завершают наi-м
шаге, когда достигают необходимой
точности определения значения корня,
т.е. когда
![]() или
или![]() , (4.6)
, (4.6)
где δyиδх— допустимые величины погрешностей определения значения функции и корня уравнения.
Однако метод Ньютона имеет ограниченную область сходимости — итерации сходятся, если начальное приближение было выбрано в достаточно малой окрестности корня. Наличие экстремума или разрыва функции между выбранным начальным приближением и корнем приведет к ошибке, рис. 4.1б.
Поэтому в САПР находят применение также итерационные методы, для которых имеются сравнительно простые способы обеспечения сходимости. Недостаток этих методов — меньшая скорость сходимости, что приводит к значительным затратам машинного времени. Основными представителями этих методов являются релаксационные методы.
Для решения систем линейных алгебраических уравнений(ЛАУ) в различных процедурах автоматизированного проектирования используетсяметод Гаусса, заключающийся в последовательном исключении неизвестных исходной системы, иматричный метод. Последний более экономичен и легче формализуется, поэтому используется значительно чаще.
 Решение
дифференциальных уравненийв САПР
выполняется с использованиемметодов численного интегрирования.
Известно несколько таких методов,
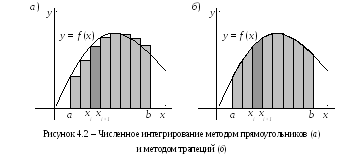
наиболее простыми из которых являютсяметод прямоугольниковиметод
трапеций.
Решение
дифференциальных уравненийв САПР
выполняется с использованиемметодов численного интегрирования.
Известно несколько таких методов,
наиболее простыми из которых являютсяметод прямоугольниковиметод
трапеций.
Все методы предполагают дискретизациюпеременной интегрирования — разбиение отрезка интегрирования на некоторое количество равных или неравных интервалов. Вметоде прямоугольниковинтеграл вычисляется как сумма площадей прямоугольников, рис.4.2а:
![]() , (4.7)
, (4.7)
где Δx = (xi+1 – xi) — величина интервала;n— количество интервалов. Как видно из рисунка, метод дает весьма большую погрешность, которая будет тем больше, чем больше величина интервалов Δx.
Метод трапеций(метод Ромберга) предполагает суммирование площадей трапеций, рис.4.2б:
![]() , (4.8)
, (4.8)
Метод несколько увеличивает объем вычислений, но дает значительно меньшую погрешность.
В методе парабол(методе Симпсона) участки кривойf (x) аппроксимируются не прямыми, как в предыдущем методе, а параболами. Метод позволяет получить весьма точный результат, но приводит к значительно большему объему вычислений.