

часть 3!
.docЧасть3
Математическое моделирование динамических режимов работы ГТЭС
В общетеоретическом смысле моделирование означает отображение или воспроизведение определенных сторон действительности для изучения интересующих исследователя объективных закономерностей; соответственно и метод моделирования – метод опосредованного познания объективной реальности, которая проявляется в виде взаимосвязанной совокупности свойств объекта исследования, отражающей различные аспекты его взаимодействия с внешней средой, существования и развития [9].
В общем случае под моделированием понимается изучение моделируемого объекта (оригинала), базирующееся на взаимооднозначном соответствии определенной части свойств оригинала и замещающего его при исследовании объекта (модели) и включающее в себя построение модели, изучение ее и перенос полученных сведений на моделируемый объект – оригинал.
В теории моделирования под оригиналом понимается объект, определенные свойства которого подлежат изучению методом моделирования. Систему будем понимать как совокупность компонентов (составных частей), которые рассматриваются как единое целое и организована для решения определенных функциональных задач так, что два любых ее компонента взаимосвязаны некоторым системообразующим отношением; в системе могут быть выделены подсистемы – относительно самостоятельные части системы, функционально связанные между собой , и элементы – компоненты системы, принимаемые в данной постановке задачи как неделимые на более мелкие составляющие.
Под явлением будем понимать совокупность процессов, сопутствующих работе сиcтемы и проявляющихся в виде изменений состояний или режимов этой системы; соответственно режим – это состояние системы, определяющееся множеством различных процессов и зависящее от собственных параметров системы и параметров возмущающих воздействий.
Все функции моделирующей системы могут выполняться набором прикладных программ, которые могут быть самостоятельно разработаны практически на любом из языков программирования высокого уровня (Pascal, С и др.) Причем по многим показателям эффективности такая программа может опережать аналогичное программное обеспечение, созданное с помощью специализированных инструментальных средств.
Наиболее подходящим для реализации программной моделирующей системы в настоящее время можно считать универсальные пакеты визуального моделирования, такие как: SIMULINK фирмы MathWorks и VisSim фирмы Visual Solution. Эти пакеты имеют богатый набор типовых блоков, как линейных динамических, так и нелинейных, связь между которыми может быть установлена как скалярами, так и векторами. Пакеты имеют достаточные для исследовательских целей средства отображения, а самое главное - это поддержка интерфейса DDE и возможность моделирования в реальном масштабе времени [8].
Переходные процессы в элементах мини - ЭЭС
После разработки достаточного числа алгоритмов для моделирования элементов мини - ЭЭС возникает вопрос о сравнении их между собой. Всестороннее испытание алгоритмов возможно только после объединения их в систему.
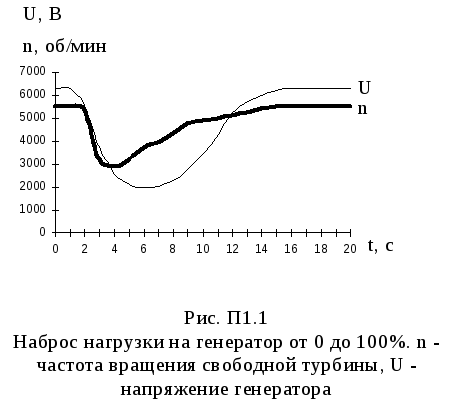
Переходные процессы в ПАЭС-2500 при набросе-сбросе статической нагрузки.


На рис. 2.9. показан расчет на модели процесса пуска асинхронного двигателя, параметры двигателя представлены в приложении 2.6. В приложении 2.6 также показаны изменения во времени момента и пускового тока асинхронного двигателя для случая, показанного на рис. 2.9.

учитывать ограничения по скорости изменения расхода топлива, а это крайне важно при синтезе алгоритмов управления [108]. Результаты моделирования представлены в приложении 2.7. Моделировался сброс и наброс нагрузки при работе ГТУ-2.5. В качестве примера при моделировании САР ГТУ была использована модель простейшего ПИ-регулятора, корме того была введена обратная связь по положению дозирующей иглы, как это имеет место в реальных САР. Результаты моделирования наглядно демонстрируют необходимость совершенствования характеристик САР и необходимость усложнения алгоритмов регулирования.
В настоящее время решение задачи программной реализации разработанного алгоритма приходится осуществлять в соответствии с потребностями разработчиков средств управления ГТЭС (ОАО “Авиадвигатель”). В связи с этим задачи программной реализации необходимо решать в два этапа: первое – использование для реализации алгоритма языка высшего уровня (Fortran, Pascal, C); второе – использовать современные средства моделирования (Simulink, C).
Таким образом задача программной реализации последовательно предлагает два этапа: вначале программной реализации бы использован язык Pascal, что необходимо для обеспечения связи с программными модулями ГТУ. После того, как эта задача была выполнена, т. е. После проверки адекватности математического моделирования была составлена задача следующего этапа: реализовать алгоритм с помощью пакета Simulink и проверять адекватность моделирования с помощью прошедших испытания программ реализованных на первом этапе.
3.1. Разработка алгоритма моделирования

Описание блоков алгоритма
Ввод начальных условий – вводятся начальные параметры синхронного генератора xq, xd, rст, rf, Td и газотурбинной установки Тд, Тст; статические характеристики, т.е. параметры статической нагрузки xстн, Rстн или асинхронного двигателя xст, rст, xрот, rрот; данные начального установившегося режима работы, именно, для СГ - Iнач, Uнач и для ГТУ – Ргту, nнач, nтк а также данные уставки регуляторов nуст=3000 Об/мин и Uуст=6300 В.
В следующем блоке производится решение системы дифференциальных уравнений ГТУ (2.2.).
Соответственно в следующем блоке происходит расчет системы дифференциальных уравнений СГ (2.3.1.)
Расчет выходных параметров регулятора ГТУ, т. е. подразумевается расчет Gт-расхода топлива на входе в камеру сгорания.
Блок расчета выходных параметров регулятора АРВ: расчет Uf –напряжения возбуждения на (К+1) шаге.
Блок вывода графиков переходных процессов подразумевает вывод результатов моделирования на экран: n – частота вращения ротора, U – напряжение на шинах генератора, I – ток нагрузки генератора, Uf - напряжение возбуждения.
В блоке условия спрашивается: соответствуют ли рассчитанные параметры заданным.
И последний блок выводит значения различных параметров режима по результатам расчета.
3.2. Программная реализация алгоритма
Моделирование динамических режимов работы осуществим при помощи программного пакета Matlab 6.0 и его приложения “Simulink”.
В библиотеке “Power elements” имеются все необходимые блоки для построения модели ТЭС. Именно:
Б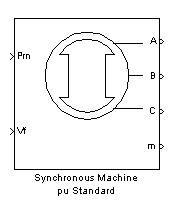 лок
“Синхронный генератор”
- в этом блоке рассчитывается система
уравнений, описывающая модель синхронного
генератора, посредством ввода его
технических данных;
лок
“Синхронный генератор”
- в этом блоке рассчитывается система
уравнений, описывающая модель синхронного
генератора, посредством ввода его
технических данных;

Блок “Турбина с регулятором частоты вращения” – здесь осуществляется ввод технических данных ГТУ, регулятора и регулирование частоты вращения;

Блок “АРВ” – блок обеспечивает регулирование тока возбуждения синхронного генератора. В блок нужно ввести такие параметры как: Кu, Кi - коэффициент усиления по напряжению, току и Тр - постоянную времени регулирования;

Блок “Нагрузки” для генератора промоделируем с помощью:
блока “трансформатора”
блока “ к.з. ”;
блока “Потери” – здесь устанавливаются значения потерь.

Обобщенная схема ТЭС представленная в приложении SIMULINK
Выглядит следующим образом:

3.3. Результаты моделирования
Н апряжение
сети.
апряжение
сети.
Ток статора.

Скорость ротора.

Напряжение в цепи ротора.
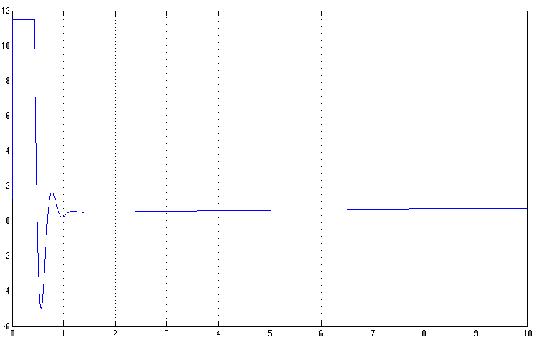
По итогам проеденного опыта получены следующие результаты:
Разгон синхронного генератора при работе на сеть осуществляется за 10 секунд.
Перерегулирование составляет 4,8%.