

1.5. Колебательное движение мт
Изучение колебательного движения МТ сводится к решению второй задачи динамики для МТ, на которую действуют в той или иной комбинации силы, зависящие от положения МТ, ее скорости и времени. Поэтому решение конкретных задач колебательного движения МТ должно проводиться с использованием алгоритма Д14 ОЗД.
1.5.1. Уравнение колебательного движения мт
Рассмотрим
движение МТ под действием центральной
силы, стремящейся возвратить МТ в
равновесное положение при ее отклонении
от этого положения. Если начальное
отклонение МТ и ее начальная скорость
совпадают по направлению, то МТ под
действием такой силы будет совершать
прямолинейное движение. Будем считать,
что сила, стремящаяся возвратить МТ в
равновесное положение, пропорциональна
ее отклонению
![]() от центра (рис.4):
от центра (рис.4):
![]() ,
,
где с – коэффициент пропорциональности. Такую силу в дальнейшем будем называть восстанавливающей.
Пусть к МТ, кроме восстанавливающей силы, приложена сила сопротивления, пропорциональная скорости ее движения (рис.4):
![]() ,
,
где ![]() – коэффициент, характеризующий
интенсивность сопротивления движению
МТ.
– коэффициент, характеризующий
интенсивность сопротивления движению
МТ.

Рис. 4
На основании второго закона динамики можно записать уравнение движения МТ:
![]() .
.
Проектируя это уравнение на направление начального отклонения и начальной скорости и приняв это направление за ось х (рис. 4), получим:
![]() .
.
Если к МТ, кроме указанных выше, будет приложена еще и возмущающая сила, изменяющаяся с течением времени по гармоническому закону и направленная по оси х (рис. 4):
Hв = H sin pt,
где Н и р - соответственно амплитуда (наибольшее значение) и круговая частота возмущающей силы, то уравнение колебательного движения примет вид:
![]() .
.
Приводя это уравнение к каноническому виду, получим:
![]() .
.
Введем следующие обозначения:
![]() .
.
Тогда дифференциальное уравнение движения примет вид:
![]() .
(1.14)
.
(1.14)
Это линейное, неоднородное дифференциальное уравнение второго порядка. Как известно из теории линейных дифференциальных уравнений, решение этого уравнения состоит из двух частей:
х = х1+х2, (1.15)
где х1 – общее решение однородного уравнения
![]() , (1.16)
, (1.16)
х2 – частное решение неоднородного уравнения
![]() .
(1.17)
.
(1.17)
Для решения однородного уравнения составим характеристическое уравнение:
![]() ,
,
где k – характеристическое число.
Решения характеристического уравнения имеют вид:
![]() .
.
Возможны три типа корней характеристического уравнения:
n< (случай малого сопротивления), тогда
![]() –комплексные
числа (
–комплексные
числа (![]() ,
,![]() ),
решение однородного уравнения (1.16) имеет
вид:
),
решение однородного уравнения (1.16) имеет
вид:
![]() ,
(1.18)
,
(1.18)
где а и – постоянные интегрирования.
n> (случай большого сопротивления), тогда
![]() –действительные
отрицательные числа, решение однородного
уравнения (1.16) имеет вид:
–действительные
отрицательные числа, решение однородного
уравнения (1.16) имеет вид:
![]() ,
(1.19)
,
(1.19)
где С1 и С2 – постоянные интегрирования.
n=, тогда
![]() –кратные
действительные отрицательные числа,
решение однородного уравнения (1.16) имеет
вид:
–кратные
действительные отрицательные числа,
решение однородного уравнения (1.16) имеет
вид:
![]() ,
(1.20)
,
(1.20)
где С1 и С2 – постоянные интегрирования.
Частное решение ищем с учетом вида правой части:
![]() ,
,
где b и – постоянные интегрирования, которые нужно подобрать так, чтобы неоднородное уравнение (1.17) обратилось в тождество.
Подставляя
значения х2,
![]() в неоднородное уравнение, получим:
в неоднородное уравнение, получим:
![]() .
.
Отсюда, с учетом формул для синуса и косинуса суммы двух углов, имеем:

Приравнивая коэффициенты при sin pt и cos pt в правой и левой частях этого уравнения, получим систему двух уравнений относительно sin и cos:
Решая систему, найдем:
 ,
,
 .
.
Возведя в квадрат первое и второе выражения и сложив их, получим:
![]() ,
(1.21)
,
(1.21)
а поделив первое на второе:
![]()
или
![]() .
(1.22)
.
(1.22)
Общее решение, например, в случае малого сопротивления среды может быть представлено в виде:
![]() , (1.23)
, (1.23)
где а и - постоянные интегрирования, определяемые начальными условиями движения, а значения b и только что были определены и от начальных условий не зависят. Для определения постоянных интегрирования (а, ) полное решение (1.23) необходимо удовлетворить начальным условиям.
Таким образом, колебания МТ являются результатом наложения (суперпозиции) собственных (первое слагаемое в правой части соотношения (1.23)) и вынужденных (второе слагаемое в правой части соотношения (1.23)) колебаний.
Наличие множителя e-nt обусловливает быстрое затухание собственных колебаний. Поэтому при расчетах в основном приходится считаться с вынужденными колебаниями, которые являются гармоническими с амплитудой b, угловой частотой p, равной частоте возмущающей силы, и начальной фазой .
Исследуем зависимость амплитуды вынужденных колебаний и начальной фазы от частоты возмущающей силы и сопротивления среды. Разделив в формулах для амплитуды b (1.21) и начальной фазы (1.22) вынужденных колебаний числитель и знаменатель на 2, перепишем их в следующем виде:
![]() ,
,
![]() ,
,
где
![]() – величина статического отклонения МТ
под действием силы Н, равной максимальному
значению вынуждающей силы Hв;
– величина статического отклонения МТ
под действием силы Н, равной максимальному
значению вынуждающей силы Hв;
![]() –отношение
круговых вынужденных и собственных
частот колебаний МТ (коэффициент
расстройки);
–отношение
круговых вынужденных и собственных
частот колебаний МТ (коэффициент
расстройки);
![]() –величина,
характеризующая сопротивление среды
(коэффициент затухания).
–величина,
характеризующая сопротивление среды
(коэффициент затухания).
Исследуем то, как будет изменяться амплитуда вынужденных колебаний в зависимости от изменения безразмерных параметров z и γ. Для этого рассмотрим подкоренное выражение в знаменателе амплитуды:
![]() .
.
При
![]() f(z,
γ) = 1 и b
= δ
независимо от значения γ.
f(z,
γ) = 1 и b
= δ
независимо от значения γ.
Для исследования функции f(z, γ) найдем производную по параметру z:
![]() .
.
Пусть
сопротивление движению МТ невелико и
![]() .
Тогда при возрастанииz
от 0 для малых z
будет
.
Тогда при возрастанииz
от 0 для малых z
будет
![]() ,
следовательно, знаменатель амплитуды
вынужденных колебаний убывает, а
амплитудаb
растет. Приравнивая производную нулю,
находим значения параметра z,
при которых функция f(z,
γ) имеет экстремум:
,
следовательно, знаменатель амплитуды
вынужденных колебаний убывает, а
амплитудаb
растет. Приравнивая производную нулю,
находим значения параметра z,
при которых функция f(z,
γ) имеет экстремум:
![]() ,
,
так
как параметр z
не может быть меньше нуля, то исключается
значение
![]() .
.
Результаты исследования на максимум амплитуды вынужденных колебаний b в зависимости от z при различных значениях отражены на рис. 5.
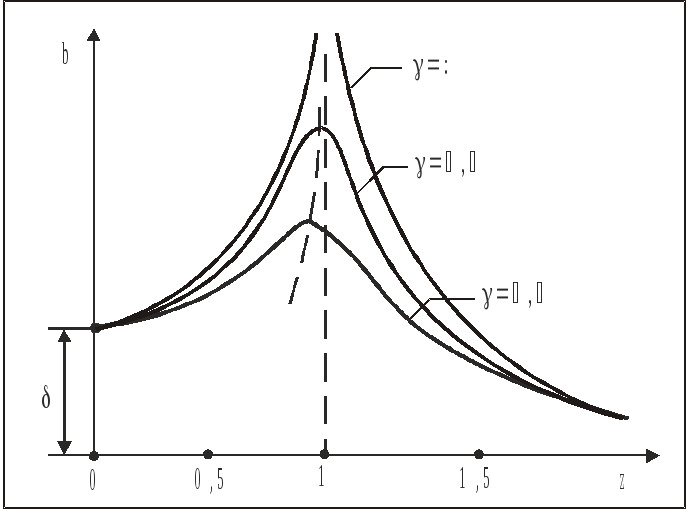
Рис. 5
В
случае периодической возмущающей силы,
которая в различных областях техники
встречается весьма часто, можно разложить
функцию
![]() ,
период которой известен, в ряд Фурье и
решить линейное, неоднородное
дифференциальное уравнение движения
второго порядка аналогично тому, как
это было сделано в этом параграфе для
гармонической возмущающей силы.
,
период которой известен, в ряд Фурье и
решить линейное, неоднородное
дифференциальное уравнение движения
второго порядка аналогично тому, как
это было сделано в этом параграфе для
гармонической возмущающей силы.
Рассмотрим частные случаи.