

Лекции ЭУПО / глава5 / глава5
.2.doc5.2. Полупроводниковый регулятор напряжения
5.2.1. Принцип параметрического регулирования напряжения. Электрические машины постоянного тока имеют существенный недостаток: щеточно-коллекторный узел, через который проходит основной поток мощности. Этот узел ограничивает максимальное значение тока, а значит момента, а, следовательно, и быстродействие. Эксплуатационные затраты узла велики. Асинхронный двигатель переменного тока проще по конструкции, дешевле, капитальные и эксплуатационные затраты меньше. Однако в построении регулируемого электропривода переменного тока имеется одна особенность, состоящая в том, что его регулирование выполняется по одному каналу, в то время как в двигателе постоянного тока – по двум, и имеется сложность в измерении ряда координат электропривода.
Известно, что одним из возможных способов регулирования координат асинхронного двигателя является изменение напряжения на обмотке статора. Для реализации такого способа регулирования между питающей сетью и обмоткой статора включается регулятор напряжения. В качестве него может выступать электромагнитный преоб-разователь, электростатический аппарат – автотрансформатор, фазорегулятор, индукционный регулятор, полупроводниковый преобразователь: транзисторный, тиристорный, симисторный. Механическая характеристика М = f(δ) асинхронного двигателя описывается следующим выражением [8]
 ,
,
из
которого ясно видна зависимость момента
от напряжения (здесь
![]() –
модуль вектора фазного напряжения,
питающего обмотки статора асинхронного
двигателя;
Rs
– активное сопротивление обмотки фазы
статора; ωs
– частота вращения магнитного поля
статора; δ
= ωs
– ωr
– параметр абсолютного скольжения; ωr
– частота вращения ротора; δк
– критическое
значение параметра абсолютного
скольжения; а11,а12,
а21–
коэффициенты, составленные из параметров
эквивалентной схемы электродвигателя
переменного тока).
Механические характеристики соответствующие
данному способу регулирования приведены
на рис. 5.13. Анализ
качества приведенных характеристик по
регули-ровочным, пусковым и перегрузочным
свойствам позволяет сделать следующие
выводы:
–
модуль вектора фазного напряжения,
питающего обмотки статора асинхронного
двигателя;
Rs
– активное сопротивление обмотки фазы
статора; ωs
– частота вращения магнитного поля
статора; δ
= ωs
– ωr
– параметр абсолютного скольжения; ωr
– частота вращения ротора; δк
– критическое
значение параметра абсолютного
скольжения; а11,а12,
а21–
коэффициенты, составленные из параметров
эквивалентной схемы электродвигателя
переменного тока).
Механические характеристики соответствующие
данному способу регулирования приведены
на рис. 5.13. Анализ
качества приведенных характеристик по
регули-ровочным, пусковым и перегрузочным
свойствам позволяет сделать следующие
выводы:
-
с уменьшением напряжения уменьшаются значения пускового и максимального значения момента двигателя,
-
диапазон регулирования скорости мал,
-
модуль жесткости статических характеристик уменьшается, что способствует ухудшению точности регулирования.
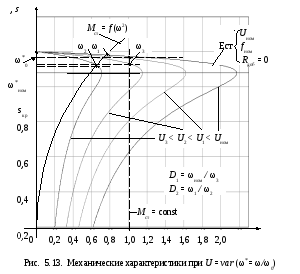
Параметрическое регулирование скорости наиболее приемлемо для механизмов с вентиляторной механической характеристикой
Мст = f (ω2). Однако для осуществления пуска двигателя, для регули-рования скорости в небольших пределах такой способ регулирования используются. В подавляющем большинстве случаев это выполняется полупроводниковыми регуляторами напряжения, которые реализуют фазовый способ регулирования напряжения питания обмоток статора асинхронного двигателя (параметрическое управление, рис 5.14, а).
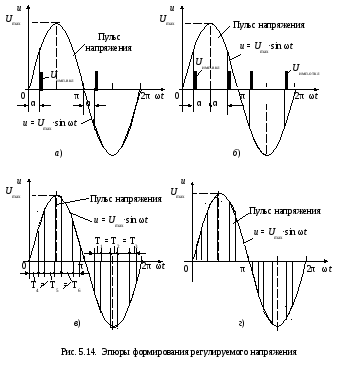
Особенность такого применения состоит в том, что в результате
преобразования входного в регулятор напряжения на обмотку статора подается выходное несинусоидальное напряжение, качественный гармонический состав которого ухудшается с увеличением угла управления. Известно, что высшие гармоники:
– во-первых, осуществляют дополнительный нагрев двигателя;
– во-вторых, гармонические тока с 3к + 1 и 3к 1 (к = 0,1,2,3…) создают в воздушном зазоре двигателя соответственно прямо и обратно вращающиеся поля и электромагнитные моменты, в результате чего образуются колебания результирующего момента на валу двигателя и, как следствие, его скорости;
– в-третьих, гармонические с номерами 3к образуют пульсирующие поля, не участвующие в создании пускового момента двигателя, а, следовательно, еще больше уменьшают значение пускового момента, ослабляя динамику пуска. Но формирование регулируемого напряжения на обмотках статора может быть выполнено не столь простым способом. Возможны следующие приемы его формирования, а именно:
-
из одного пульса, симметрично расположенного относительно центра полусинусоиды, рис. 5.14, б;
-
из нескольких пульсов одинаковой ширины, произвольно расположенных на полупериоде, рис. 5.14, в;
-
из нескольких пульсов разной ширины, произвольно расположенных на полупериоде, рис. 5.14, г;
-
из нескольких пульсов одинаковой ширины, расположенных на полупериоде определенным образом, рис. 5.15
В задачу каждого из этих вариантов входит уменьшение высших гармоник в питающем обмотку двигателя напряжении.
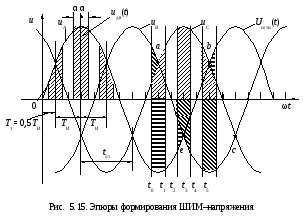
Рассмотрим последний вариант и одну из его интерпретаций, а именно формирование напряжения на каждом полупериоде из пульсов, центры которых отстоят друг от друга на расстояние π/m, где m = 3,6,9,12… целое число пульсов в полупериоде, центр первого пульса располагается в точке π/2m от начала полупериода, положение фронтов каждого пульса изменяется в ту и другую сторону от центра пульса (рис. 5.15). Кроме того, количество пульсов на каждом полупериоде трехфазной системы напряжения выбирается из соотношения n = 2·m·k ± 1, где k = 1,2,3,4…, а n – номер выбранной гармоники, которая должна присутствовать в промодулированном напряжении. Эпюры напряжения при данном широтно-импульсном формировании приведены на рис. 41. Здесь Uсети – напряжение питающей сети, α – угол регулирования, Т1 – расстояние до центра первого пульса, Ти – расстояние между пульсами. Например, если в напряжении допускаются 5, 7, 11, 13 и т. д. гармоники, то число пульсов на полупериоде m = 3, если – 11,13,23,25, то m = 6. Следовательно, рассматриваемый способ широтно-импульсной модуляции переменного напряжения осуществляет подавление определенных гармоник, чем улучшает гармонический состав питающего напряжения и тем самым энергетические показатели, а так же позволяет сформировать симметричную трехфазную систему, как для фазных, так и для линейных напряжений. Другие способы могут не позволить получить симметричную трехфазную систему. Угол α может изменяться по любому закону: линейному, пропорциональному, прямоугольному, синусоидальному и т. п. Поскольку гармонический состав питающего асинхронный двигатель напряжения определяет форму механических характеристик, а, следовательно, его регулировочные свойства и энергетические показатели, оценим предлагаемый способ методами математического анализа. Анализируемая функция (рис. 41) носит несинусоидальный характер, является нечетной, периодической с периодом 2π и определена на этом интервале следующим способом:
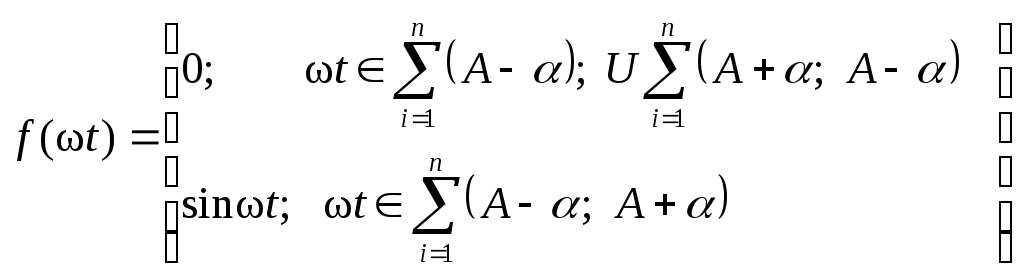 ,
,
где A = π/(2m)·n, n = m, n – число нечетных членов натурального ряда чисел. В силу своей нечетности рассматриваемая функция при разложении в ряд Фурье будет иметь коэффициенты а0 и аn, равными нулю. Коэффициенты типа bn функции, отражающей напряжение питания двигателя, могут быть представлены так:
где k – номер гармоники, значение которой исследуется.
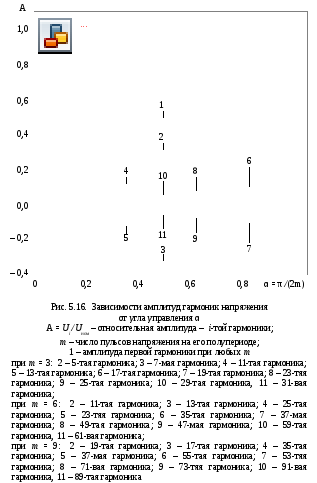
Конкретный численный гармонический анализ рассматриваемого ШИМ-напряжения при m = 3,6,9 был проведен с использованием пакета программ типа МatLab. На рис. 5.16 результаты проведенного гармонического анализа, где в качестве примера приведены изменения значений первой и десяти первых высших гармонических при различном количестве пульсов на полупериоде выходного напряжения, а именно при m = 3, 6 и 9. Эти зависимости показывают, что амплитуды напряжений высших гармонических неизменны для порядкового номера их последовательности вне зависимости от числа пульсов напряжения. Известно, что полное сопротивление электрических и магнитного контуров двигателя для каждой гармоники возрастает в соответствии с ее номером. Это приводит к малым значениям тока в обмотках двигателя, а, следовательно, и к его малым электромагнитным моментам, которые создаются высшими гармоническими питающего ШИМ-напряжения. Влияние этих электромагнитных моментов будет рассмотрено при исследовании переходных процессов электропривода, управляющегося ШИМ-напряжением. Уменьшение уровня токов от высших гармонических питающего ШИМ-напряжения снижает уровень греющих потерь в активной составляющей общих потерь двигателя, а это приводит к определенному расширению диапазона регулирования скорости двигателя, создает условия энергосбережения в его установившихся и переходных режимах.
5.2.2. Схемное решение регулятора напряжения. Указанные выше способы широтно-импульсной модуляции напряжения могут быть реализованы с помощью полупроводниковых преобразователей, силовые схемы которых основаны на транзисторных ключах.
Рассмотрим один из вариантов полупроводникового регулятора напряжения для реализации предлагаемого способа управления скоростью двигателя, рис. 5.17. Регулятор состоит из двух диодно-транзисторных пар на каждую фазу напряжения питания, например VT1-VD1 и VT2-VD2 для фазы А. Диодно-транзисторная пара – это интеллектуальный модуль, управляемый драйвером. Работа регулятора состоит в следующем. Допустим, что в момент t4 (рис. 5.15), формирования на выходе регулятора (на входе нагрузки) пульса напряжение фазы А на его входе uа и uс положительно, а ub отрицательно. Для формирования переднего фронта пульса выходного напряжения включаются транзисторы VT1 и VT5. При включенных VT1 и VT5 ток нагрузки по фазам А и С протекает через них по указанному пути, в фазе В через диод VD4. Задний фронт этого пульса формируется путем закрытия транзисторов VT1 и VT5. При реактивном характере нагрузки (например, асинхронный двигатель) во избежание перенапряжений, возникающих при коммутации фаз нагрузки, необходимо организовать пути свободной ее циркуляции.
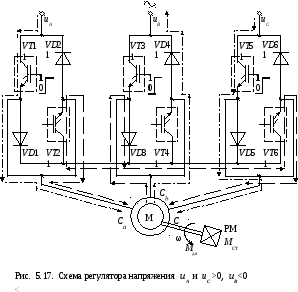



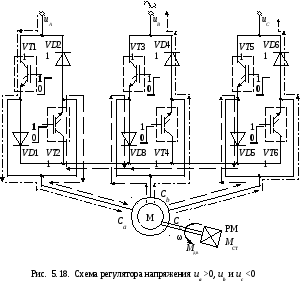
Для этого включаются транзисторы VT2 и VT6. Они открываются и совместно с диодом VD3 организуют цепь свободной циркуляции тока нагрузки между ее фазами, т. е. организуют короткое замыкание всех фаз нагрузки. Таким образом, напряжение на нагрузке равно нулю, и общее сформированное ШИМ-напряжение не искажается реактивным характером нагрузки. Для случая, когда напряжение uа положительное, а напряжения ub и uc отрицательные, приведены несколько другие пути протекания тока, рис. 5.18. Изменяя время включения–выключения транзисторов регулятора по отношению начала синусоид, можно сформировать любой закон широтно-импульсной модуляции выходного переменного напряжения, поступающего на нагрузку, в том числе и предлагаемый.
Анализ работы трёхфазного регулятора, в котором регулирование выходного напряжения осуществляется широтно-импульсным методом подключения фаз нагрузки к фазам питающей сети с последующим их отключением от фаз сети и закорачиванием их на время пауз, из-за неоднозначности процессов включения и выключения транзисторных ключей регулятора, а также из-за асимметрии их импульсов управления, показывает, что возможны междуфазные короткие замыкания. Для устранения этой возможности система управления должна для формирования переднего фронта импульса выходного напряжения сначала включать транзисторы фазы, имеющей наибольший отрицательный потенциал по отношению к потенциалам других фаз (в рассматриваемом выше случае это момент t4, при котором uа > ub и uс > ub, а роль транзистора в фазе ub выполняет диод VD3). Затем транзисторы фазы, имеющей промежуточное значение потенциала между наименьшим и наибольшим значениями (в рассматриваемом случае включается транзистор фазы А – VT1, ибо uс > uа). Потом транзисторы фазы, имеющей наибольший положительный потенциал (в рассматриваемом случае включается транзистор фазы С – VT5). Для формирования заднего фронта пульса напряжения выключается транзистор фазы, имеющей наибольший положительный потенциал по отношению к потенциалам других фаз (следует выключить транзистор VT1 фазы А, а включить VT2). Затем транзистор фазы, имеющей промежуточное значение потенциала между наименьшим и наибольшим (следует выключить транзистор VT5 фазы С, а включить VT6). Потом транзистор фазы, имеющей наибольший отрицательный потенциал (роль транзистора в фазе ub выполняет диод VD4).
5.2.3. Схема управления регулятором напряжения. Для реализации рассмотренного алгоритма работы трехфазного регулятора напряжения разработана схема управления, рис. 5.19. Схема содержит: синхронизатор 1; дискриминаторы 2, 3, 4; JK – триггеры 7, 8, 9 и драйверы 17,18, 19 управления транзисторными модулями 20, 21 для каждого фазы питающего напряжения, генератор тактовых импульсов 6, элемент 5, задающий начало и конец пульса напряжения на фазе нагрузки в соответствии с законом его ШИМ, а также группу логических элементов 11…16 типа 2И-НЕ, контролирующих включенное-отключенное состояние силовых транзисторов регулятора UZ, и элемент 10, накладывающий ограничение на работу драйверов в зависимости от функционирования защитных устройств транзисторных модулей.
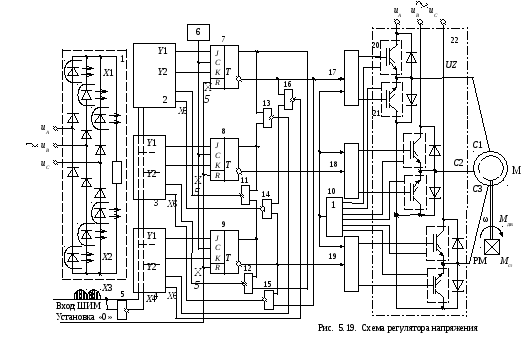
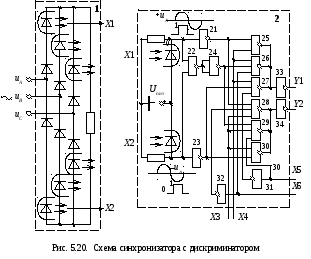
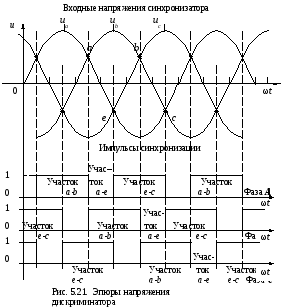
Синхронизатор в данной схеме выполняет три функции: первая состоит в гальванической развязке сети, с которой синхронизируется система управления силовыми транзисторами регулятора, вторая – в выделении участков напряжения силовой цепи, на которых управляются силовые транзисторы (участки a-b, a-e, e-c, рис. 5.15, 5.21), а третья – в преобразовании аналогового сигнала (синусоидальных напряжений на входе синхронизатора) в цифровой сигнал (в комбинацию логических единиц и нулей на выходе синхронизатора). Первая и третья функции выполняются использованием в схеме синхронизатора оптронных пар. Вторая – схемным решением синхронизатора. Основную функциональную роль в работе системы управления играют дискриминаторы. Каждый дискриминатор имеет (рис. 5.20):
– два синхронизирующих входа: X1 – с положительной полуволной напряжения, X2 – с отрицательной полуволной того же напряжения;
– два управляющих входа: X3, разрешающий формировать передний фронт пульса выходного напряжения, и X4, разрешающий формировать задний фронт этого пульса;
– два информационных входа: X5 и X6 о включённом и выключенном состоянии двух других фаз;
– два выхода Y1и Y2, задающих состояния JK-триггеров, необходимые для управления силовыми транзисторами регулятора.
На участке a-b напряжения любой фазы синхронизирующий сигнал Х1 каждого дискриминатора имеет логическое значение, равное «1», на участке b-c или b-e – равное «0», на участке c-d – равное «0», а синхронизирующий сигнал Х2 этого же дискриминатора имеет на участке a-b логическое значение, равное «0», на участке b-c или b-e – равное «0», на участке cd – равное «1» (рис. 5.21). Рассмотрим формирование ШИМ-напряжения на положительном полупериоде напряжения нагрузки фазы А, например на отрезке времени t0 – t1. До момента времени t0, поскольку формировалась пауза в выходном напряжении, транзисторы 21 в каждой фазе регулятора включены, что соответствует значениям входов дискриминатора Х3 = 0, Х4 = 1, Х5 = 1, Х6 = 1 и выходам Y1 = 1, Y2 = 0. В момент t0 на управляющем входе Х3 (вход ШИМ) появляется логический сигнал «1», что соответствует Х4=0, а синхронизирующие входы дискриминаторов для канала фазы А: Х1 = 1, Х2 = 0, для канала фазы В: Х1 = 0, Х2 = 0, для канала фазы С: Х1 = 0, Х2 = 1. Вследствие этого выходы дискриминатора фазы С приобретают следующие значения: Y1 = 0, Y2 = 1, которые поступает на соответствующие информационные входы JK-триггера 9, и при приходе тактового импульса от генератора 17 триггер переходит в нулевое состояние, (на инверсном его выходе логическая «1»). По этому сигналу драйвер, управляющий парой транзисторов 20–21, включает транзистор 20 и выключает транзистор 21 фазы С, т. е. осуществляется коммутация фазы, имеющей наименьший по отношению к другим фазам потенциал. В то же самое время для канала фазы В (участок b-е или а-е) синх- ронизирующие входы его дискриминатора имеют значения Х1 = 0, Х2 = 0, а остальные входы – Х3 = 1, Х4 = 0, Х5 = 0, Х6 = 1.
Вследствие этого выходы дискриминатора фазы В приобретают следующие значения: Y1 = 0, Y2 = 0, а тактовый импульс от генератора 6 не изменяет состояние триггера 8 этого канала управления. Однако в момент времени t0 произойдет включение транзистора 20 фазы С. Этому соответствует следующее состояние выходов триггера: в канале фазы С прямой выход имеет логический «0», инверсный выход – логическую «1». Это приведет к изменению состояния информационного входа Х5 дискриминатора канала фазы В (выход элемента 12), т. е. теперь Х5 = 1, а вход Х6 сохранит свое значение. Изменение состояния информационного входа Х5 приведет к следующему сочетанию выходов дискриминатора 8: Y1 = 0, Y2 = 1, при котором тактовый импульс от генератора 6 через соответствующий драйвер включит транзистор 20 и выключит транзистор 21 фазы В, т. е. выполняется коммутация фазы, имеющей потенциал между наименьшим и наибольшим значениями. При этом значение входа Х6 дискриминатора в канале фазы А изменит свое состояние – Х6 = 0 (элемент 14). Для фазы А синхронизирующие входы его дискриминатора имеют значения Х1 = 1, Х2 = 0 (участок a-b) и совместно с другими входами Х3 = 1, Х4 = 0,
Х5 = 0, Х6 = 0. Вследствие этого выходы дискриминатора фазы А приобретают следующие значения: Y1 = 0, Y2 = 0, т. е. те значения, которые они имели до момента времени t0, и состояние транзисторов 20 и 21 в фазе А не изменяется. Но в момент времени t0 произойдет включение транзистора 20 фазы В, чему соответствует следующее состояние выходов триггера в канале фазы В: прямой выход имеет логический «0», инверсный выход – логическую «1». Это приведет к изменению состояния информационного входа Х5 дискриминатора канала фазы А (выход элемента 11), т. е. теперь Х5 = 1. Это дает следующее сочетание выходов дискриминаторов: Y1 = 0; Y2 = 1, при котором тактовый импульс от генератора 6 через триггер 7 и драйвер 17 включит транзистор 20 и выключит транзистор 21 фазы А, т.е. выполняется коммутация фазы, имеющей наибольший потенциал по отношению к потенциалам других фаз. При этом значение входов Х6 дискриминаторов в каналах фаз В и С изменяет свое состояние –Х6 = 0 (элементы 15 и 16).
Окончание формирования импульса выходного напряжения осуществляется в момент времени t1, когда на управляющий вход Х3 поступает логический «0» (вход ШИМ), что соответствует Х4 = 1, а синхронизирующие входы для дискриминатора канала фазы А – Х1 = 0, Х2 = 0, для дискриминатора канала фазы В – Х1 = 1; Х2 = 0, для дискриминатора канала фазы С – Х1 = 0, Х2 = 1. Вследствие этого выходы дискриминатора фазы В приобретают следующее значение: Y1 = 1 и Y2 = 0, при которых тактовый импульс от генератора 6 выставит эти значения на выход триггера 8 и через драйвер 18 выключит транзистор 20 и включит транзистор 21 фазы В, т. е. отключится напряжение фазы, имеющей потенциал, наибольший по отношению к потенциалам других фаз. При этом значение входов Х6 дискриминаторов каналов фазы А и С изменит своё состояние — Х6 = 1 (элементы 14, 16). В то же самое время для канала фазы А (участок b-c или а-е) синхронизирующие входы дискриминатора имеют значение Х1 = 0; Х2 = 0, а остальные входы дискриминатора: Х3 = 0; Х4 = 1; Х5 = 1; Х6 = 0. Вследствие этого выходы дискриминатора канала фазы А приобретают следующее значение Y1 = 0; Y2 = 0, а тактовый импульс от генератора 6 не изменяет состояние триггера 7. Однако в момент t1 совершившееся коммутация транзисторов в фазе В изменяет состояние входа Х6 дискриминатора канала А – Х6 = 1. Это дает следующее сочетание выходов дискриминатора: Y1 = 1, Y2 = 0, при котором тактовый импульс от генератора 6 выставит это сочетание на выход триггера 7 и через драйвер 17 выключит транзистор 20 и включит транзистор 21 фазы А, т. е. отключится напряжение фазы, имеющей потенциал между наибольшим и наименьшим. При этом значение входа Х6 дискриминатора канала фазы В изменит свое состояние – Х6 = 1(элемент 15).
Для канала фазы С синхронизирующие входы дискриминатора имеют значения Х1 = 0; Х2 = 1 (участок е-с), а другие входы – Х3 = 0; Х4 = 1; Х5 = 1; Х6 = 0. Вследствие этого выходы дискриминатора канала фазы С приобретают следующие значения: Y1 = 0, Y2 = 0, но тактовый импульс от генератора 6 не изменяет состояние триггера 9. Однако, совершившаяся коммутация транзисторов фазы А изменяет состояние входа Х6 дискриминатора канала фазы С – Х6 = 1. Это дает следующее сочетание выходов дискриминатора: Y1 = 1, Y2 = 0, при котором тактовый импульс генератора 6 выставит это сочетание на выход триггера 9 и через драйвер 19 выключит транзистор 20 и включит транзистор 21 фазы С, т. е. отключится напряжение фазы, имеющей наименьший потенциал по отношению к потенциалам других фаз.
Таким образом, схема управления выполняет необходимый алгоритм переключения силовых транзисторов регулятора по формированию ШИМ-напряжения на нагрузке. Повышение надёжности достигается еще и тем, что прохождение сигналов управления на силовые транзисторы выполняется по команде тактового генератора. Частота следования тактовых импульсов выбирается исходя из необходимого значения задержки прохождения импульсов на разные фазы. Например, при необходимости задержки в 5…10 мкс частота тактового генератора составит 100…200 кГц.
Рассмотренные схемы синхронизатора и дискриминатора могут использоваться и для других устройств автоматики, где необходимо иметь гальваническую развязку синхронизирующей части системы управления с силовой частью устройства, где необходимо выявить определенные участки переменного напряжения, на которых выполняется управление силовой схемой устройства, где трехфазное напряжение переменного тока необходимо преобразовать в цифровую форму.
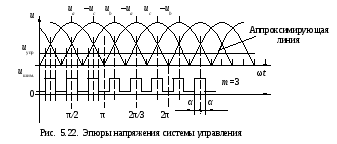
Система управления, формирующая «Вход ШИМ», должна, как было показано, определить центры пульсов напряжения в соответствии с рассматриваемым законом и изменяющиеся положения передних и задних фронтов этих пульсов. Рационально для этого использовать свойства синусоидального трехфазного напряжения, состоящие в том, что напряжения фаз имеют естественное пересечение как раз в необходимых для этого точках, и, что фазные напряжения сдвинуты относительно линейных напряжений на 900. При наименьшем количестве пульсов на полупериоде m = 3 максимальная ширина пульса не превышает значения π/3, максимальный угол управления не превышает значения π/6. На участке 0… π/6 значения синусоидальной функции с наименьшей погрешностью отличаются от прямолинейной зависимости между двумя точками, аппроксимирующей синусоиду. Поэтому, используя это свойство, получим, что ширина пульса напряжения будет достаточно прямо пропорциональна напряжению управления. Это наглядно видно на рис. 5.22. Техническая реализация приведенных выше теоретических предпосылок приведена на рис. 5.23. Устройство состоит из трансформатора TV, двухполупериодных выпрямителей UZ1…UZ6, компараторов D1...D6, конъюнкторов D7...D10, и сумматора D11, на выходе которого имеется последовательность импульсов,
соответствующая рассматриваемому способу формирования ШИМ-
напряжения, а также переключатель SA, позволяющий провести выбор трех или шести пульсов на полупериоде формируемого ШИМ-напряжения. Вторичная обмотка трансформатора позволяет получить фазные и линейные значения напряжения, синхронизированные с сетью питания силовой схемы регулятора напряжения. На выходе выпрямителей имеются напряжения, предназначенных для получения пульсов ШИМ-напряжения на выходах компараторов путем сравнения их с напряжением управления. Конъюнкторы D7...D8 собирают в единую последовательность импульсы, образовавшиеся от компелирования их у отдельных видов напряжения.