

7. Основные понятия и определения тау: автоматическое управление,
регулирование, воздействие, возмущение, объект управления, автоматическое управляющее устройство, сигнал, обратная связь.
Рассмотрим некоторые основные понятия автоматики, касающиеся принципиальных теоретических вопросов автоматического управления. К таким понятиям следует отнести: управляемый объект, управление, автоматическое управляющее устройство, автоматическую систему, воздействие, сигнал, обратную связь и др. Эти понятия являются общими для автоматического управления в самых различных областях науки и техники независимо от конкретных особенностей, принципа действия и практического назначения той или иной автоматической системы.
Ранее уже рассматривались понятия управления и цели системы:
Управление – целенаправленное вмешательство в процесс в системе.
Цель системы - получение желаемого выходного воздействия или достижения желаемого состояния системы.
Регулирование – разновидность управления, целью которого является поддержание постоянной или изменение по заданному закону некоторой величины, характеризующей процесс.
Объект, в котором протекает управляемый процесс, называется управляемым объектом или объектом управления.
Система управления (СУ) – совокупность управляющего устройства (УУ) и объекта управления (ОУ).
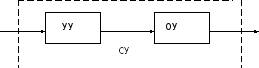
Рис. 3.1. Функциональная схема системы управления.
Состояние объекта определяется рядом величин, характеризующих как воздействие на объект внешней среды и управляющих устройств, так и протекание процессов внутри самого объекта.
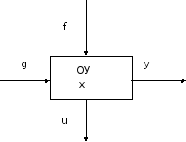
Рис. 3.2. Функциональная схема воздействий на объект управления.
f = f ( f1, f2, … fk ) - неконтролируемые возмущения;
g = g (g1, g2, … gr ) – контролируемые возмущения;
u = u (u1, u2, … us) – управляющие воздействия;
x = x (x1, x2, … xn ) – переменные состояния (фазовые координаты объекта);
y = y (y1, y2, … ym ) – выходные (наблюдаемые) переменные;
Контролируемые величины, характеризующие состояние объекта, по которым ведётся управление, называются управляемыми, или регулируемыми величинами.
Величины, выражающие внешние влияния на объект называются воздействиями.
Воздействия, вырабатываемые управляющим устройством или задаваемые
человеком, называются управляющими воздействиями.
Воздействия, не зависящие от системы управления, называются возмущениями.
Возмущения можно разделить на два вида: а) нагрузка, б) помехи.
В общем случае управляющие, возмущающие воздействия и состояния объекта – векторы.
Если объект характеризуется одной управляющей и одной управляемой величиной, то векторы u и y имеют по одной координате, и объект называется простым или односвязным (одномерным).
При наличии нескольких взаимосвязанных координат векторов u и y объект называется многосвязным (многомерным).
Управление, осуществляемое без участия человека, называют автоматическим, а техническое устройство, выполняющее в этом случае функции управления,— автоматическим управляющим устройством или контроллером; объект управления и контроллер во взаимодействии друг с другом образуют систему автоматического управления.
Системы автоматического управления – чисто машинные комплексы, построенные по законам автоматического регулирования и применяемые главным образом для управления технологическими и производственными процессами, описание которых может быть полностью формализовано.
Система автоматического управления – совокупность управляемого объекта и управляющего устройства, взаимодействующих между собой в соответствии с законом (алгоритмом) управления.
Канал, по которому информацию с выхода системы об изменении управляемой величины подается на вход контроллера, называют каналом обратной связи, или просто обратной связью.