

Тема 3.3. Техническое обслуживание электрических машин.
Лекция 7-9
см. лит-ру
Мандыч Н.К. Ремонт электродвигателей. Пособие электромонтеру. – К.: Техника, 1989. – 152с.
АкимоваН.А. Монтаж ,техническая эксплуатация и ремонт электрического и электромеханического оборудования: учебное пособие для образ. учрежд. сред. проф. образ. / Н.А.Акимова, Н.Ф.Котеленец, Н.И.Сентюрихин. Под общ.ред. Н.Ф.Котеленца.-3изд.,стер.-М: Издательский центр «Академия», 2005. – 296 с.
Сибикин Ю.Д.Монтаж, эксплуатация и ремонт электрооборудования промышленных предприятий и установок: учебное пособие для проф. учеб. заведений / Ю.Д.Сибикин-2-е изд., стер. – М.: Высш.шк., 2008 –492 с ил.
Журнал «Электрооборудование: Эксплуатация и ремонт», 2006, № 12.
Характерные неисправности электродвигателей и способы их устранения.






Лекция 10-12
Причины вибрации ЭМ, способы ее измерения и устранения.
Повышенная вибрация прежде всего опасна для подшипников электродвигателя.
В подшипниках качения быстро развиваются усталостные явления металла, появляются трещины, выбоины на рабочих поверхностях качения, разрываются сепараторы.
От воздействия вибрации может также наступить изгиб или излом вала, бочка ротора - оторваться от вала, появиться трещина в станине статора или в торцовой крышке, повредиться опорная рама и фундамент. Повышается и ускоряется износ изоляции обмоток электродвигателя.
Вибрация электродвигателя, превышающая норму, должна быть устранена.
Причинами вибрации, которые условно разделяются на две группы, могут быть следующие.
Первая группа
1. Неправильная центровка электродвигателя с механизмом.
2. Неудовлетворительное состояние соединительной муфты: износ пальцев, сухариков, зубцов, несоосность отверстий под пальцы в полумуфтах, небаланс полумуфты или пальцев.
3. Небаланс ротора приводимого механизма, особенно часто встречающийся у дымососов и вентиляторов вследствие износа лопаток.
4. Дефект подшипников приводимого механизма.
5. Дефекты фундамента и фундаментной рамы: раз рушение бетона маслом, обрыв сварки на ребрах жесткости рамы, плохое крепление двигателя к раме после центровки и т. д.
Эта группа причин вибрации электродвигателя должна устраняться персоналом, ремонтирующим приводимый механизм, за исключением, пожалуй, устранения дефекта в сварке рамы под электродвигателем, если она одновременно не является рамой механизма.
Вторая группа
1. Небаланс ротора электродвигателя.
2. Образование трещин и обрыв стержней коротко- замкнутой обмотки ротора от кольца.
3. Отрыв бочки ротора от вала.
4. Изгиб или излом вала ротора.
5. Слабое крепление отдельных деталей электродвигателя (подшипников, торцовых крышек).
6. Недопустимо большой зазор в подшипниках скольжения, дефекты подшипников качения.
Эта группа причин устраняется персоналом, ремонтирующим электродвигатели.
На практике вибрация иногда вызывается не одной, а несколькими причинами.
При обнаружении повышенной вибрации подшипников электродвигателя желательно замерить ее виброметром или вибрографом, чтобы знать истинную величину.
Не отключая двигателя, следует проверить, не являются ли причиной вибрации слабое закрепление двигателя, нарушение сварки элементов фундаментной рамы или разрушение бетона фундамента. Для этого на ощупь определяют и сравнивают вибрацию лап электродвигателя или стульев его подшипников, болтов, крепящих электродвигатель, и рамы вблизи лап.
При недостаточной затяжке болта вибрирует только лапа двигателя, а болт не вибрирует или вибрирует незначительно.
Лучше всего разницу в вибрации можно заметить, приложив палец на стык двух сопрягаемых деталей, в данном случае на стык болта и лапы. При нарушении прочного сопряжения между ними вибрация вызывает перемещение одной детали относительно другой, и палец легко обнаружит это.
Если вибрирует и болт, то указанным способом проверяется, нет ли разницы в вибрации на стыке между лапой и рамой, между верхней полкой и вертикальной частью рамы, между ребром жесткости и верхней и нижней полками, между нижней полкой рамы и фундаментами и т. д. Иногда нарушение прочного сопряжения между деталями обнаруживается также по появлению мелких пузырей, а при сильной вибрации - и мелких брызг масла в месте стыка.
При обнаружении дефекта в сопряжении между рамой и фундаментом, появляющегося чаще всего из-за разъедания бетона маслом, весь пропитанный бетон, в том числе и пока сохранивший прочность, должен быть удален и заменен свежим. На время схватывания бетона агрегат должен быть остановлен и выведен из резерва.
Если дефектов в фундаменте, раме, креплении электродвигателя и его торцовых крышек, креплении приводимого механизма не обнаружено, следует рассоединить муфту между электродвигателем и механизмом и запустить электродвигатель в работу на холостом ходу.
Если электродвигатель вибрирует и на холостом ходу, то причина вибрации находится в самом электродвигателе. В этом случае следует проверить, не исчезает ли вибрация сразу же после отключения электродвигателя от сети. Исчезновение вибрации сразу же после отключения от сети указывает на наличие неравномерного зазора между ротором и статором. Для устранения вибрации, вызванной неравномерным зазором, следует принять меры к его выравниванию.
Сильная вибрация электродвигателя при пуске на холостом ходу указывает на неравномерный зазор или на обрыв стержня в обмотке ротора. Если зазор равномерен, то причина вибрации только в обрыве стержня ротора. Вибрация в этом случае устраняется путем ремонта обмотки ротора.
Повышенные зазоры в подшипниках скольжения сами по себе вибрацию не вызывают. Если нет других причин вибрации, то и при больших зазорах электродвигатель, особенно на холостом ходу, будет работать нормально. Но если появятся другие причины вибрации, то величина ее при больших зазорах будет значительно выше, чем при допустимых зазорах. Поэтому если электродвигатель вибрирует только под нагрузкой и определить причину вибрации не удается, то следует принять меры к уменьшению зазора в подшипниках путем их перезаливки.
Вибрация электродвигателя по причине дефектности подшипников качения обнаруживается легко. Дефектный подшипник сильно шумит, греется. Его необходимо заменить и только потом продолжить выяснение причины вибрации, если она осталась.
Измерение вибрации электродвигателей
Вибрация электродвигателей измеряется виброметрами.
Виброметры небольших размеров позволяют проводить измерения вибрации в стандартном диапазоне частот от 10 до 1000 Гц. Как правило, такие приборы очень просты в управлении, оборудованы они всего одной кнопкой, поэтому пользоваться им могут все. Работают они от аккумуляторов, даже и при больших морозах. Виброметры можно использовать при температурах от – 25 до + 60 градусов.
Некоторые виброметры позволяют проводить диагностику вращающегося оборудования на предмет выявления дефектов. Они оснащаются специальными датчиками.
Процесс выбора датчика определяется условиями его применения. Наиболее часто в системах контроля вибрации используют датчики:
виброперемещения;
виброскорости;
виброускорения.
Первые характеризуют положение контролируемого объекта, вторые – быстроту изменения его положения во времени, а третьи – быстроту изменения скорости. Эти три параметра, характеризующие вибрацию, являются взаимосвязанными и, контролируя, например, виброускорение, путем однократного или двукратного интегрирования, легко вычислить остальные два параметра. Наличие трех типов датчиков обусловлено необходимостью контроля вибрации на объектах с различными частотными характеристиками. В низкочастотной области хорошо зарекомендовали себя датчики виброперемещения, для среднечастотных объектов обычно применяются датчики виброскорости, а для высокочастотных – датчики виброускорения.
Физический смысл взаимосвязанных величин можно трактовать следующим образом: виброперемещение характеризует величину деформации объекта, виброскорость отражает степень усталостной прочности, а по виброускорению можно судить о величине колебательных сил, действующих на объект(например, датчики виброускорения определяют состояние подшипников качения).
Некоторые виброметры позволяют оценивать форму и спектр вибросигнала. Это дает возможность оперативно выявить небаланс, расцентровку.
Вся информация в виброметре показывается на графическом экране, предусмотрена его подсветка.
Практические занятия.
Схемы пуска ЭД.
1. Пуск асинхронных электродвигателей переменного тока.
Для пуска асинхронных электродвигателей переменного тока применяют два способа:
прямой пуск;
пуск при пониженном напряжении;
реостатный пуск двигателей с фазным ротором.
Прямой пуск асинхронных двигателей нормального исполнения с короткозамкнутым ротом
При прямом пуске двигатель включается непосредственно в сеть (рис.14.1)
 Рис.
14.1 Схема прямого пуска асинхронного
двигателя
Рис.
14.1 Схема прямого пуска асинхронного
двигателя
В
начале пуска асинхронных двигателей
ротор неподвижен, скольжение
 и поэтому ЭДС в обмотке ротора
и поэтому ЭДС в обмотке ротора достигает наибольшего значения, равного
достигает наибольшего значения, равного соответственно пусковые токи
ротора
соответственно пусковые токи
ротора
 и статора
и статора
 так же достигают максимального
значения, (по мере разгона двигателя
скольжение уменьшается и становиться
меньше единицы
так же достигают максимального
значения, (по мере разгона двигателя
скольжение уменьшается и становиться
меньше единицы ,
соответственно уменьшается ЭДС ротора
и токи статора и ротора).
,
соответственно уменьшается ЭДС ротора
и токи статора и ротора).
При прямом пуске начальный пусковой ток ротора превышает номинальный, в зависимости от типа двигателя, в 6…8 раз.
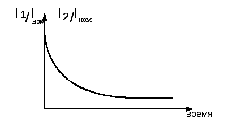
Рис. 14.1 Изменение действующих токов статора и ротора при пуске асинхронного двигателя
Большие пусковые токи вызывают провалы напряжения в судовой сети, что может привести к массовому
Реостатный пуск двигателей с фазным ротором
Асинхронные двигатели с фазным ротором применяются значительно реже двигателей с короткозамкнутым ротором. Они используются в следующих случаях: 1) когда двигатели с короткозамкнутым ротором не могут быть использованы по условиям регулирования частоты вращения; 2) когда статический момент сопротивления на валу больше пускового момента короткозамкнутого двигателя
Асинхронные двигатели с фазным ротором (АД с ФР) пускают в ход с помощью резисторов, включаемых в цепь ротора, что позволяет уменьшить пусковой ток и увеличить пусковой момент двигателя (рис.14.5).
Для
пуска двигателя включают линейный
контактор КЛ, через контакты которого
обмотка статора двигателя подключается
к питающей сети «напрямую». Контакты
КУ1 и КУ2 контакторов ускорения при пуске
должны быть разомкнуты. Тем самым
последовательно в каждую из трех фазных
обмоток ротора вводятся обе ступени
добавочных (пусковых) резисторов R иR
иR .
.
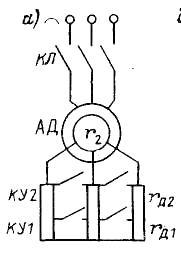
Рис. 14.5 Схема пуска асинхронного двигателя с фазным ротором
Пусковые резисторы увеличивают общее (эквивалентное) сопротивление цепей фазных обмоток ротора, что (см. выше) приводит, с одной стороны, куменьшению пускового тока, с другой –к увеличению пускового момента.
Когда
двигатель разгонится до скорости 30-40%
номинальной, отключают первую ступень
R ,
для чего замыкают контакты КУ1.
,
для чего замыкают контакты КУ1.
Двигатель
с броском тока продолжает разгоняться,
и при скорости 60-70% номинальной отключают
вторую ступень R ,
для чего замыкают контакты КУ2.
,
для чего замыкают контакты КУ2.
Двигатель
после отключения резисторов R иR
иR продолжает разгоняться до номинальной
скорости.
продолжает разгоняться до номинальной
скорости.
Отключение резисторов можно производить вручную – при помощи контроллеров, или полуавтоматически – при помощи более сложных по устройству магнитных станций.
По сравнению с двигателями постоянного тока асинхронные двигатели при прочих равных условиях дольше разгонятся до рабочей скорости и имеют меньший пусковой момент.
Пуск асинхронного двигателя при пониженном напряжении на обмотке статора
Ограничение пусковых токов асинхронных двигателей путем понижения напряжения применяется в том случае, если пуск осуществляется без нагрузки.

В соответствии с формулой пусковой ток пропорционален подведенному напряжению . Уменьшение напряжения вызывает соответствующее уменьшение пускового тока.
Для уменьшения пусковых токов применяют схемы пуска при пониженном напряжении:
включением резисторов в цепь обмотки статора (рис. 9.13, а);
включением индуктивных сопротивлений в цепь обмотка статора (рис. 9.13, б);
включением обмотки статора через автотрансформатор (рис.9.13, в);
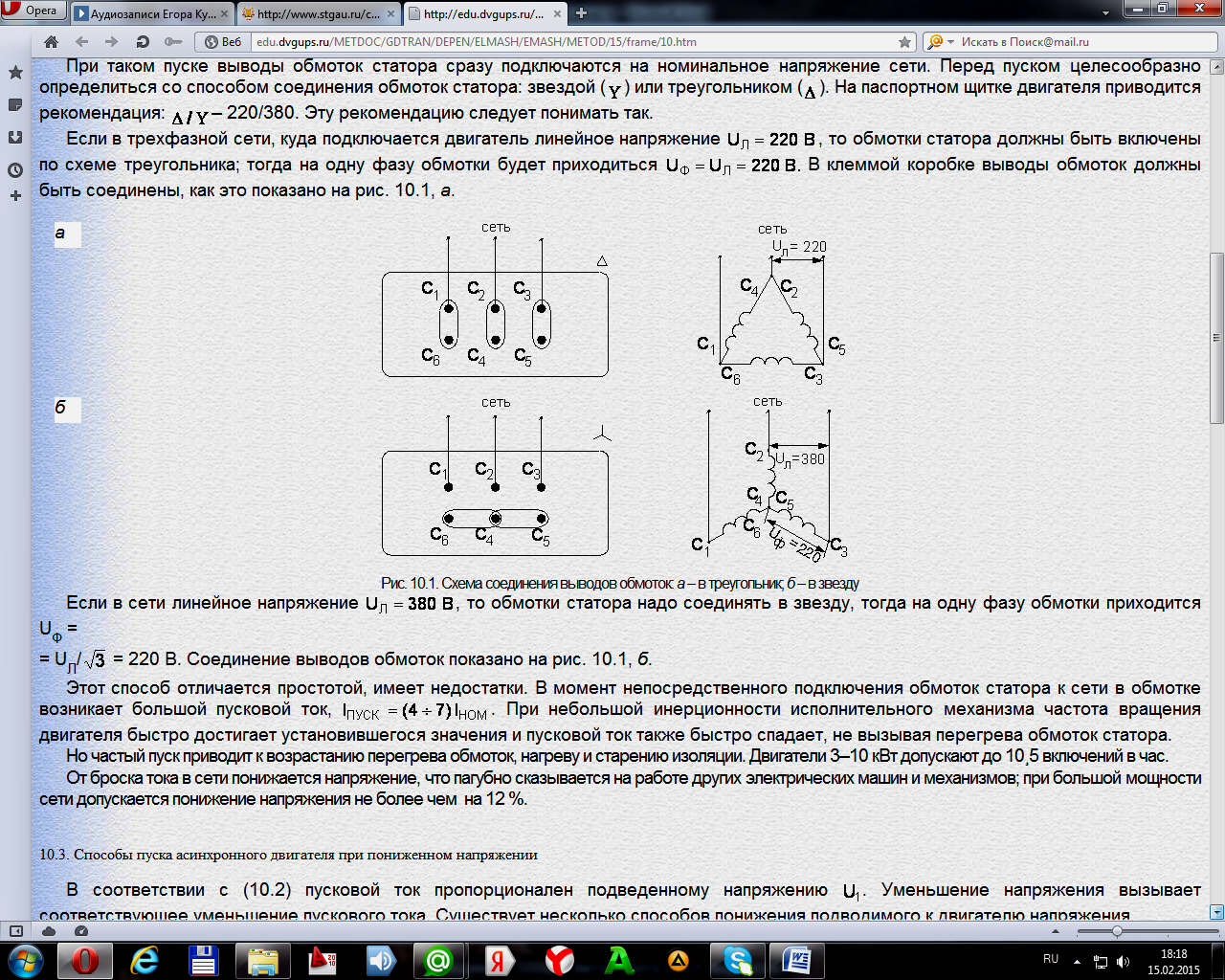
переключением обмотки статора со способа соединения фазных обмоток статора (
 )
«звезда» на «треугольник» (рис. 14.9 г).
)
«звезда» на «треугольник» (рис. 14.9 г).

Рис.14.9 Схемы пуска асинхронного двигателя при пониженном напряжении

В схеме на рис. 14.9, а при пуске замкнуты контакты линейного контактора КЛ, поэтому обмотка статора подключается к питающей сети через пусковые токоограничивающие резисторы СП. После того, как двигатель наберет обороты, а пусковой ток уменьшится до безопасных значений (обычно 2…2,5 номинального), схема управления замыкает контакты второго контактора – ускорения КУ, при этом двигатель подключается к сети «напрямую».
В схеме на рис. 14.9б для ограничения пусковых токов последовательно с обмоткой статора включены токоограничивающие рабочие обмотки дросселя насыщения Др. Его обмотка управления ОУ питается постоянным током через понижающий трансформатор Тр и выпрямитель Вп.
При пуске индуктивное сопротивление рабочих обмоток дросселя должно быть максимальным, поэтому ток в обмотке управления ОУ должен быть минимальным. Для этого ползунок резистора поста управления ПУ должен находиться в крайнем правом положении.
После пуска ток в обмотке управления ОУ постепенно увеличивают, для чего перемещают ползунок ПУ влево. Индуктивное сопротивление рабочих обмоток постепенно уменьшается.
Когда ползунок ПУ перемещен влево до упора, пуск закончен. При таком положении ползунка индуктивное сопротивление рабочих обмоток дросселя практически равно нулю, что равнозначно прямому подключению обмотки статора к питающей сети.
В схеме на рис. 14.9в использованы два контактора – регулировочный КЛ1 и линейный КЛ2, а также автотрансформатор АТр.. При пуске включается контактор КЛ1, при замыкании нижних контактов которого образуется нулевая точка «звезды» трех фазных обмоток автотрансформатора, а через верхние контакты подается питание питающей сети на верхние выводы этих обмоток.
В момент пуска ползунки автотрансформатора должны находиться в крайнем нижнем положении, при этом обмотка статора асинхронного двигателя закорочена через нижние контакты КЛ1, т.е. напряжение на ней равно нулю. Поэтому скорость ротора также равна нулю, ротор неподвижен.
Для пуска ползунки автотрансформатора постепенно перемещают вверх, при этом напряжение, снимаемое с обмоток автотрансформатора и подаваемое на обмотку статора, также постепенно увеличивается. Поэтому скорость двигателя увеличивается.
Пуск закончен, если ползунки автотрансформатора перемещены в крайнее верхнее положение. Когда на обмотку статора подается полное напряжение питающей сети, автотрансформатор не нужен.
В этот момент времени включается линейный контактор КЛ2 и отключается регулировочный КЛ1. При замыкании контактов КЛ2 обмотка статора двигателя подключается к питающей сети «напрямую», а при размыкании контактов КЛ1 автотрансформатор отключается от обмотки статора двигателя (он уже выполнил свою роль).
В схеме на рис. 14.9г использован линейный контактор КЛ и переключатель «звезда»-«треугольник» П. Для пуска включают линейный контактор КЛ, через замыкающиеся контакты которого напряжение питающей сети подается на верхние выводы обмотки статора двигателя АД. После этого переводят переключатель в нижнее положение «звезда». При этом нижние выводы обмотки статора соединяются вместе, в нулевую точку, обмотка статора соединена «звездой» и на статор двигателя подаётся фазное напряжение. В результате преключения с треугольника на звезду пуск приизводится при пониженном напряжении, что спообствует уменьшению пускового тока.
После того, как двигатель наберет оборотыи перестанет увеличивать скорость, переключательпереводят в верхнее положение «треугольник». Двигатель с броском тока переключается со «звезды» на «треугольник», после чего разгоняется на «треугольнике» до скорости, зависящей от статического момента механизма.
Этот способ нашёл самое широкое применение на судах ввиду его простоты (не требуются резисторы, индуктивные сопротивления или автотрансформаторы) и эффективности - пусковой ток уменьшается в 3 раза.
Все 4 рассмотренные выше схемы пуска при пониженном напряженииимеют один и тот же принципиальныйнедостаток: резкое уменьшение пускового момента двигателя, поскольку электромагнитный момент двигателя пропорционален квадрату напряжения.






Регулирование частоты вращения.
1. Асинхронные двигатели.
Частота вращения АД в соответствии с формулой имеет вид:

Отсюда следует три основных способа регулирования - изменением f1, p, и s.
а) Частотное регулирование возможно только при питании АД от отдельного синхронного генератора с переменной частотой вращения либо от преобразователя частоты. При этом необходимо соблюдать закон регулирования, который при постоянстве момента сопротивления на валу имеет вид

Частотное регулирование обычно применяют в тех случаях, когда требуется изменять частоту вращения в широких пределах, например, в тяговом электродвигателе.
б) Регулирование частоты вращения путем изменения числа пар полюсов широко применяется в АД с короткозамкнутым ротором. Регулирование здесь осуществляется ступенчато. На рис. 1 показана простейшая схема обмотки одной фазы, позволяющая изменять число полюсов в два раза. Таков принцип получения двухскоростного АД.

а) б)
Рис. 1 . Схема переключения обмотки статора для изменения числа полюсов : а) 2р = 4, б) 2р = 2.
Если же нужно иметь три или четыре частоты вращения (трех- и четырехскоростной АД), то на статоре располагают еще одну обмотку, при переключении которой можно получить дополнительно еще два варианта полюсности двигателя, например, р = 3 и р = 4.
Многоскоростные АД имеют большую массу и габариты, а следовательно, и большую стоимость по сравнению с двигателем нормального исполнения. Кроме того, они не обеспечивают плавности регулирования.
в) Регулирование частоты вращения изменением скольжения применяется как в АД с короткозамкнутым ротором, так и в АД с фазным ротором.
В
АД с короткозамкнутым ротором этот
способ реализуется за счет плавного
снижения питающего напряжения. При этом
максимальный момент MM
̴
U12
будет понижаться, а скольжение расти
(рис.2).
Рис.2. Механические характеристики АД при различных напряжениях U1
Момент, развиваемый двигателем, всегда равен моменту сопротивления (нагрузки) на его валу М = МС. Поэтому уменьшение напряжения можно производить до тех пор, пока Mm ≥ MC. При скольжении s > sm АД теряет устойчивость и опрокидывается. В соответ- ствии с этим, регулирование возможно в узких пределах sH ≤ s ≤ sm Реально для АД средней и большой мощностей, работающих с номинальной нагрузкой, удается снизить частоту вращения n на 3...5%.
У малых АД , имеющих относительно большие активные сопротивления, частоту вращения можно уменьшить на 40...50%.
Следует иметь ввиду, что увеличить r2 можно и у крупных АД на стадии их проектирования и изготовления. При этом механическая характеристика станет мягче и диапазон регулирования расширится. Однако при этом возрастут потери в обмотке ротора и понизится КПД (1% скольжения соответствует примерно 1% КПД). В крупных же электрических машинах, где борются за каждую десятую долю процента КПД из-за необходимости снижения эксплуатационных расходов, это недопустимо.
В АД с фазным ротором скольжение изменяют посредством включения в цепь добавочного активного сопротивления (рис.3).
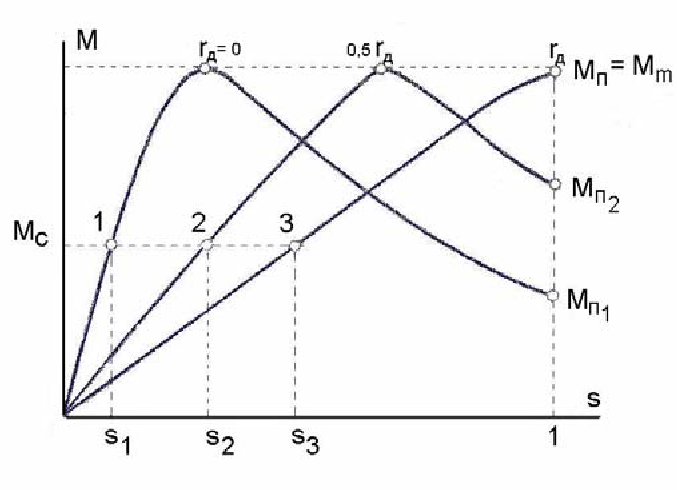
Рис.3. Механические характеристики АД при различных добавочных сопротивлениях rд в цепи ротора
При этом скольжение может меняться в широких пределах sH ≤ s ≤ 1, т.е. практически до полной остановки двигателя. Однако наряду с плавностью и широтой диапазона регулирования имеет место большие потери энергии в регулировочном реостате , что существенно снижает энергетические показатели электропривода.
Необходимо отметить, что имеется возможность регулировать частоту вращения АД с фазным ротором без потерь энергии в реостате.
Для этого электрическую энергию, выделяющуюся в цепи ротора при скольжении (энергия скольжения), посредством преобразовательной установки передают обратно в питающую сеть переменного тока или к вспомогательному двигателю. Последний сообщает дополнительную механическую энергию валу основного двигателя. Такие электромеханические системы называют асинхронными каскадами. Существуют разнообразные каскадные схемы. Но все они имеют существенный недостаток, который сводится к возрастанию потерь в АД, а следовательно, к необходимости увеличения его габаритных размеров. Поэтому применение асинхронных каскадов можно считать рациональным только на переходном этапе, пока статические преобразователи частоты сравнительно дороги и имеют недостаточно высокую надежность.
2. Двигатели постоянного тока.
Частоту вращения можно регулировать следующими способами :
а) напряжением U , подводимым к электродвигателю;
б) добавочным сопротивлением Rд, включенным в цепь якоря, тогда

в) магнитным потоком Ф с помощью тока возбуждения, вводя реостат в цепь возбуждения.
Регулирование частоты вращения изменением напряжения питания U осуществляется уменьшением напряжения от номинального значения, что приводит к уменьшению частоты вращения (регулировка «вниз»). Этот способ регулирования позволяет сохранить высокое значение КПД, однако при этом требуется специальный регулируемый источник питания (например, система генератор - двигатель).
Искусственные характеристики при изменении U будут иметь вид прямых, показанных на рис. 6.4.

Рис. 6.4. Механические характеристики ДПТ НВ при изменении питающего напряжения питания
Регулирование частоты вращения с помощью добавочного сопротив-ления Rд в цепи якоря также является регулировкой «вниз». Механические характеристики при наличии Rд называются искусственными. Из-за больших потерь мощности в регулировочном реостате и значительном уменьшении КПД этот способ находит ограниченное применение.
Реостатное регулирование частоты вращения осущест-вляется путем введения в цепь якоря дополнительных актив-ных сопротивлений – резисторов, т.е. Rяц = (Rя + Rдя) = var при U = Uн, Ф = Фн,. Как видно из уравнения механической характеристики

при варьировании величины добавочного сопротивления Rдя в цепи якоря скорость идеального холостого хода ω0 остается постоянной, изменяется лишь жесткость характеристики

Регулирование частоты вращения уменьшением магнитного потока осуществляется посредством реостата в цепи возбуждения и дает увеличение частоты вращения (регулировка «вверх»).
Электрическое торможение АД
1. Асинхронные двигатели.
Для выполнения ряда производственных процессов требуется быстрое и плавное торможение АД. Электрическое торможение, в отличие от механического, является более предпочтительным.
Существует три основных способа электрического торможения: противовключение; генераторное; динамическое.
При торможении противоключением изменяют направление вращения поля путем переключения двух линейных проводов, питающих обмотку статора. Ротор при этом вращается навстречу полю со скольжением

развивая тормозной момент. Частота вращения n уменьшается до нуля, и если АД не отключить, то он начнет вращаться в обратную сторону. Таким образом осуществляется реверс, т.е. изменение направления вращения двигателя.
В начальный момент торможения имеет место большой бросок тока, для ограничения которого в цепь фазного ротора вводят реостат. При генераторном торможении частота вращения ротора n превосходит частоту вращения поля n1. Переход в генераторный режим АД происходит в электроприводах при изменении направления нагрузочного момента. На практике его часто используют для подтормаживания, т.е. для ограничения скорости механизма. Типичный пример - спуск груза краном, когда АД вращается согласно с направлением спуска и скорость движения груза ограничивается, поскольку в этом режиме электромагнитный момент является тормозящим. При этом происходит рекуперация, т.е. энергия отдается в сеть. Этот режим широко применяется для АД с переключение числа полюсов. Так, например, если при р = 1 ротор имел частоту вращения n = 3000 об/мин, то при переключении на р = 2 он будет тормозиться до n = 1500 об/мин, возвращая энергию обратно в сеть.
При динамическом торможении обмотку статора АД отключают от сети, а затем подключают к источнику постоянного тока. В результате в ЭМ появляется постоянный магнитный поток, индуктирующий в обмотке вращающегося ротора переменную ЭДС. Создается тормозной электро- магнитный момент, под действием которого ротор начинает тормозиться. При этом энергия торможения поглощается сопротивлением ротора. В этом режиме АД представляет собой обращенный синхронный генератор, в котором статор создает постоянное магнитное поле, а ротор представляет собой якорь генератора.