

21. Задание {{ 1021 }} Гильфанов 7-21
Преобразованная в июне 1935 г. Комиссия по телемеханике и автоматике (КТА) предусматривала создание секций
приборостроения
диспетчеризации
теоретических разработок
редакции журнала по автоматике
по нейросетевым технологиям
Кибернетика и управление
22. Задание {{ 1022 }} Гильфанов 7-22
Кибернетическая модель процесса управления содержит информацию о
структурном расположении и их связи отдельных звеньев
преобразовании и обработке входных сигналов отдельных звеньев системы в соответствующие выходные сигналы
конструкции технического устройства управления
физической природе технического устройства управления
принципе действия технического устройства управления
23. Задание {{ 1023 }} Гильфанов 7-23
|
кибернетика |
наука об управлении, т.е. о целенаправленном воздействии на системы, а также о процессах передачи и обработки информации и их автоматизации в технических и нетехнических системах |
|
управление |
целенаправленное (воздействие) изменение параметров или поведения отдельных систем или объектов |
|
регулирование |
поддержание технологического параметра на заданном значении |
|
автоматика |
прикладная дисциплина, изучающая общие принципы и методы построения автоматических систем, т.е. автоматических машин, агрегатов, цехов, заводов, выполняющих поставленные перед ними цели без непосредственного участия человека |
|
основной раздел методологии автоматизации |
расчет и создание систем автоматического управления |
24. Задание {{ 1024 }} Гильфанов 7-24
Сущность принципа управления в кибернетике, который ввел Н. Винер в 1948 г. заключается в том, что движение и действие больших масс вещества или передача и преобразование больших количеств энергии направляется и контролируется при помощи
малых количеств энергии, несущих информацию
больших количеств энергии, несущих информацию
малых количеств вещества, несущих информацию
больших количеств вещества, несущих информацию
25. Задание {{ 1025 }} Гильфанов 7-25
Различают системы автоматического управления:
непрерывные автоматические системы
циклические (станки-автоматы, автоматические линии)
ациклические системы (информационные системы)
социальные системы
юридические и правовые системы
26. Задание {{ 1026 }} Гильфанов 7-26
В задачи технической кибернетики входит изучение информационных автоматических систем по направлениям:
реализация принципов управления, открытых в живой природе
изучение человека как звена системы управления
изучение человека как элемента социального общества
изучение правовых аспектов поведения человека в производстве
Фундаментальные принципы управления
62.Задание {{ 1062 }} Гильфанов 7-62
Принцип разомкнутого управления представлен на рисунке

Близость Y(t) и Yзад(t) обеспечивается
только конструкцией и совокупностью физических закономерностей, действующих во всех элементах
отклонением Y(t) Yзад(t)
возмущением f(t)
производной dY(t)/dt
63. Задание {{ 1063 }} Гильфанов 7-63
Принцип разомкнутого управления представлен на рисунке

Особенность данного принципа управления
схема системы имеет вид разомкнутой цепи
общие правила построения разомкнутых систем зависят от частных свойств конкретных элементов системы.
процесс работы не зависит от результата
процесс работы полностью определяется результатом
64. Задание {{ 1064 }} Гильфанов 7-64
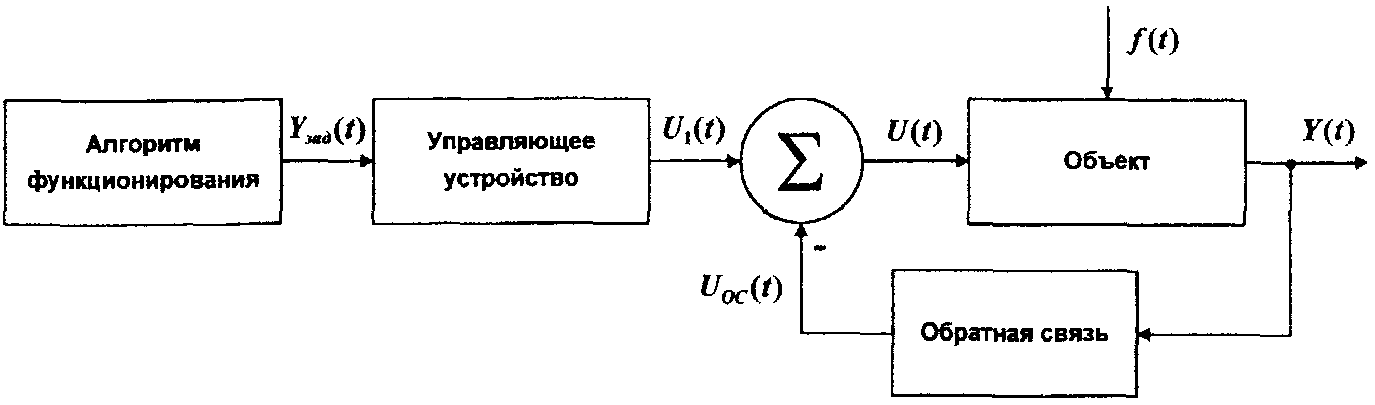
Функциональная схема системы управления, иллюстрирующая принцип компенсации (принцип управления по возмущению), представлена на рисунке.

Для обеспечения требуемой точности выполнения алгоритма функционирования вводятся коррективы, зависящие от возмущения:
![]()
![]()
![]()
![]()
65. Задание {{ 1065 }} Гильфанов 7-65
Функциональная схема системы управления, иллюстрирующая принцип компенсации (принцип управления по возмущению), представлена на рисунке.

Такая схема может быть реализована, если существует
имеется информация о возмущающем воздействии f(t)
имеется информация о задающем воздействии Yзад(t)
отсутствует информация о возмущающем воздействии f(t)
отсутствует информация о задающем воздействии Yзад(t)
66. Задание {{ 1066 }} Гильфанов 7-66
Функциональная схема, иллюстрирующая принцип обратной связи (принцип управления по отклонению), приведена на рисунке.
Принцип управления с использованием информации о реакции объекта на управляющее действие называется принципом обратной связи.
Структурная схема вид
замкнутой цепи
незамкнутой цепи
разомкнутой цепи
последовательной разомкнутой цепи
67. Задание {{ 1067 }} Гильфанов 7-67
Функциональная схема, иллюстрирующая принцип обратной связи (принцип управления по отклонению), приведена на рисунке.

В системе управления по отклонению коррективы в управляющее воздействие вводятся
по фактическому значению управляемой величины в объекте
по
отклонениям значений координат
![]()
по
значениям
![]()
по
значениям
![]()
68. Задание {{ 1068 }} Гильфанов 7-68
Функциональная схема, иллюстрирующая принцип обратной связи (принцип управления по отклонению), приведена на рисунке.
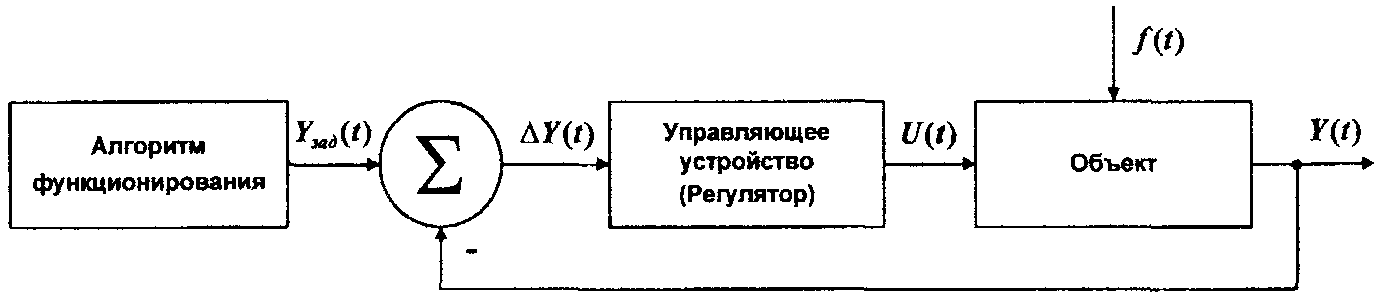
Отклонение ∆Y(t) формируется по формуле
Y(t) = Yзад(t) - Y(t)
Y(t) = Y(t) + Yзад(t)
Y(t) = f(t) - Yзад(t)
Y(t) = f(t) + Yзад(t)
Моделирование
74. Задание {{ 1074 }} Гильфанов 7-74
Изучение каких-либо свойств оригинала путем построения модели и изучения ее свойств называется моделированием. Моделирование используется для разработки алгоритма управления.
Моделирование различают
физическое
математическое
риторическое
формальное
гуманистическое
75. Задание {{ 1075 }} Гильфанов 7-75
Пример физического моделирования
военные учения
макет гидроэлектростанции
деловая игра
лабораторная установка
расчет поведения объекта на компьютере
текстовое описание поведения системы
графическое описание поведения системы
табличное описание поведения системы
76. Задание {{ 1076 }} Гильфанов 7-76
Математической моделью называют
систему математических соотношений, описывающих изучаемый объект
систему математических соотношений, не описывающих изучаемый объект
совокупность элементов находящихся во внутренних отношениях и связях
совокупность элементов не находящихся во внутренних отношениях и связях
77. Задание {{ 1077 }} Гильфанов 7-77
С помощью математической модели последовательно рассматриваются и решаются задачи, связанные с поведением реальной изучаемой системы:
описание поведения системы
объяснение поведения системы
предсказание (прогноз) поведения системы
декомпозицию системы
композицию системы
78. Задание {{ 1078 }} Гильфанов 7-78
Математические модели могут представлять собой
аналитические зависимости
графические зависимости
дифференциальные уравнения, описывающие движения системы
таблицы или графики переходов систем из одного состояния в другое
таблицы умножения
таблицы несоответствия
79. Задание {{ 1079 }} Гильфанов 7-79
При моделировании движения управляемых систем широко используется понятие "черного ящика".

Подход, при котором применяется метод "черного ящика", предполагает исследование систем
внутренняя структура которых недоступна для наблюдения
внутренняя структура которых вполне доступна для наблюдения
у которых внешнему наблюдателю доступны лишь входные и выходные величины
у которых внешнему наблюдателю недоступны ничего
Статика и динамика систем
110. Задание {{ 110 }} Гильфанов 7-110
Отметьте правильный ответ
Если x - входная, y - выходная величины системы, t - время,
уравнение динамики системы
у=f(x)
у=f(x,t)
dу/dx=f(x)
dу/dt=f(x)
dx/dy=f(x)
dx/dy=f(y)
111. Задание {{ 111 }} Гильфанов 7-111
Отметьте правильный ответ
Если x - входная, y - выходная величины системы, t - время,
уравнение статики системы
у=f(x)
у=f(x,t)
dу/dx=f(x)
dу/dt=f(x)
dу/dx=f(t)
dx/dt=f(y)
112. Задание {{ 112 }} Гильфанов 1-112
Отметьте правильный ответ
Линеаризация нелинейной функции основана на использовании разложения функции в ряд
Тейлора
Фурье
гармонический
Лорана
113. Задание {{ 113 }} Гильфанов 1-113
Отметьте правильный ответ
Уравнение статики линейной системы, если x - входная величина, y - выходная величина, k, a - постоянные коэффициенты
y=kx
y=a+kx
y=k/x
y=1/x
y=x/y
114. Задание {{ 114 }} Гильфанов 1-114
Отметьте правильный ответ
Уравнение статики нелинейной системы, если x - входная величина, y - выходная величина, k, a - постоянные коэффициенты
y=kx
y=a+kx
y=k/x
y=x/y
y=1+x
115. Задание {{ 115 }} Гильфанов 1-115
Отметьте правильный ответ
Под статической характеристикой понимают зависимость
выходной величины от входной величины системы в равновесном (установившемся) состоянии
входной величины от выходной величины системы в равновесном (установившемся) состоянии
выходной величины от входной величины системы в неравновесном (неустановившемся) состоянии
выходной величины от времени
входной величины от времени
116. Задание {{ 116 }} Гильфанов 1-116
Отметьте правильный ответ
Поведение системы в неравновесном (неустановившемся) состоянии или в переходном процессе описывается уравнениями
динамики
статики
не содержащими временную координату
117. Задание {{117 }} Гильфанов 1-117
Отметьте правильный ответ
Обычно уравнения, описывающие поведение системы являются
статики - алгебраическими, динамики - дифференциальными
статики - дифференциальными, динамики - алгебраическими
статики - простыми по сравнению с уравнениями динамики
статики - более сложными по сравнению с уравнениями динамики
динамики более простыми, чем уравнения статики
118. Задание {{ 118 }} Гильфанов 1-118
Отметьте правильный ответ
При управлении важным является поведение систем
в установившемся режиме
в неустановившемся режиме
в статическом режиме