

49-96 / 69.ЭП постоянного тока с одноконтурной системой регулирования скорости
.pdf11
а заменяется апериодическим звеном. Данный контур обеспечивает линейность зависимости Eп от Eз. Он
вопределённой степени он должен компенсировать возмущения по питающему напряжению. Тем не менее,
вдинамике возмущения будут наблюдаться. Просадки напряжения будут наблюдаться и в статике, когда ключи преобразователя полностью открыты. Поскольку, при моделировании сверхточное и абсолютно полное описание исследуемого объекта не является самоцелью, а целью является оценка характера поведения системы в типовых и в наихудших условиях, то в данном случае замена внутреннего контура с произведением величин на апериодическое звено с сумматором вполне допустима и в реальных ситуациях адекватна. Реальная система вести себя хуже, чем моделируемая не будет1.
Стоит также отметить, что преобразователь является звеном с ограничением выходного сигнала. Поэтому при моделировании следует ограничивать величину входного значения Eз....
Рассмотрим теперь датчики скорости. В качестве датчиков скорости раньше довольно часто применялись тахогенераторы — небольшие электрические машины постоянного тока с постоянными магнитами, напряжение на выходе которых было пропорционально скорости вращения двигателя. Для того, чтобы обеспечить наименьшую статическую погрешность (влияние сопротивления якоря и щёток), а также динамическую погрешность (влияние индуктивности якоря), потребление тока от тахогенератора должно быть минимальным. Из-за наличия щёточного коллектора снимаемое с тахогенератора напряжение имеет небольшие пульсации напряжения, для устранения которых используются фильтры. Датчик скорости описывается передаточной
функцией
kдс Wдс = Tдсp + 1,
где kдс — коэффициент передачи по скорости, который можно найти по паспортным данным; а Tдс — суммарная постоянная времени тахогенератора (поскольку измерение ЭДС всегда сопряжено с потреблением тока, то свести к нулю постоянную времени тахогенератора Rтг/Lтг, невозможно) и установленного фильтра. Её порядок обычно составляет Tдс 0,005 с.
В современных приводах в качестве датчиков скорости используются датчики импульсов (энкодеры). Энкодер при повороте его вала выдаёт определённое число прямоугольных импульсов, частота следования которых пропорциональна скорости вращения. Чтобы рассчитать скорость, в простейшем случае привод подсчитывает количество импульсов, полученных в течение заданного промежутка времени. Таким образом, данные о скорости поступают также с некоторым запаздыванием, поэтому и для датчиков импульсов пригодна передаточная указанная функция.
Частотные характеристики системы ТП–ДПТ (скорость в зависимости от напряжения и от момента)
Mст
Iз |
Wрт |
Eз |
Eп |
kя Iя |
M |
|
|
|
Wп |
|
|
kM |
|
|
|
Tяp+1 |
||||
|
|
|
|
|
Eя |
kE |
|
|
|
|
|
|
|
1!
Jp
Wдт
Рис. 6. Структурная схема привода постоянного тока с ограничением тока.
В качестве регулятора скорости обычно используются П- ПИ- и ПИД-регуляторы (в основном, первые два), передаточные функции которых приведены ниже
П: |
WРС(p) = kРС |
РСp + 1 |
|||
ПИ: |
WРС(p) = kП РС + |
kИ РС |
или WРС(p) = |
||
p |
TРСp |
||||
|
|
|
|||
ПИД: WРС(p) = ( РС1p + 1)( РС2p + 1)
TРСp
Стоит отметить, что ПИД-регулятор физически нереализуем, и на самом деле используются регуляторы
1Заметим, что абсолютно точное моделирование системы на практике невозможно, т. к. любые параметры измеряются с
12
с передаточной функцией
WРС(p) = ( РС1p + 1)( РС2p + 1),
TРСp(T РСp + 1)
где T РС — малая постоянная времени. Обычно, она настолько мала, что соответствующая ей частота лежит много выше области значимых частот. Строго говоря, в сущности, ни одна из функций не реализуется в том виде, как они указаны в таблице.... всегда есть малые постоянные времени.
Использование П-, ПИ- и ПИД-регуляторов для настройки систем с Tэм>4Tя и Tэм<4Tя (аналитический метод настройки, метод настройки по ЛАХ)
Структура одноконтурной системы управления. Как известно, ДПТ НВ имеет два канала регулирования:
–напряжение якоря;
–ток обмотки возбуждения.
В соответствии с этим, регулирование можно вести как по цепи якоря, так и по цепи возбуждения. Рассмотрим первый вариант
Передаточная функция объекта регулирования
|
kп |
|
kяkM |
||
W0(p) = |
|
|
|
|
. |
Tпp + 1 |
ke (Tяp + 1)Jp + kяkE kM |
||||
Система регулирования будет иметь вид
Структурная схема
Здесь Wдс — передаточная функция датчика скорости с коэффициентом передачи kдс и постоянной
времени Tдс
kдс Wдс = Tдсp + 1;
Wрс — передаточная функция регулятора скорости.
Требуется подобрать такой регулятор скорости, который обеспечивал бы требуемый переходный процесс по скорости. Как правило, регуляторы скорости выбираются в виде пропорционального или пропорциональноинтегрального регулятора (П– или ПИ–регулятора). Существует много способов выбора скорости параметров регулятора. Наиболее простой из них — на основе ЛАХ.
Вначале необходимо построить ЛАХ объекта управления W0(p)Wдс(p). Вспомним, что обычно 4Tя < Tэм. Поэтому, двигатель можно представить как два апериодических звена
kд
Wд(p) = (Tд1p + 1) (Tд2p + 1),
тогда передаточная функция объекта будет иметь вид
W0(p)Wдс(p) = |
kп |
|
kд |
|
kдс |
, |
Tпp + 1 |
(Tд1p + 1) (Tд2p + 1) |
Tдсp + 1 |
соответственно, ЛАХ будет иметь вид Как известно, желаемая частотная характеристика разомкнутой системы должна пересекать нулевую
линию (линию, на которой система имеет единичный коэффициент усиления) с наклоном минус 20 дБ/дек. (наклон минус 1). При пересечении этой линии с наклоном минус 40 дБ/дек, в системе будут незатухающие колебания, а при большем наклоне система станет неустойчивой.
При использовании П–регулятора Wрс = kрс. Величину коэффициента kрс нужно выбирать таким образом, чтобы переход с минус 20 дБ/дек на минус 40 дБ/дек был ниже нулевой линии, по крайней мере, на 6 дБ. Отметим, что скорость в такой системе будет отрабатываться с ошибкой, установившееся значение которой можно определить следующим образом. Положим p = 0, тогда передаточная функция разомкнутой системы будет иметь вид
WрсW0Wдс = kрсkпkдkдс
. Коэффициент передачи замкнутой системы
1 |
|
|
kрсkпkдkдс |
|
|||
замк(0) = |
|
|
|
|
|
. |
|
kдс |
1 + kрсkпkдkдс |
|
|||||
Для устранения установившейся ошибка используется ПИ–регулятор с передаточной функцией |
|
||||||
|
|
|
|
рсp + 1 |
|
||
Wрс(p) = |
|
|
. |
(2) |
|||
|
Tрсp |
||||||

13
Как известно, при перемножении передаточных функций их ЛАХ суммируются. Передаточная функция вида (2) будет иметь вид рис. ??. Постоянную времени рс выбирают равной наибольшей постоянной времени
Tд1. Тогда регулятор принимает вид
Wрс = Tд1p + 1. Tд1ap
Постоянную a выбирают таким образом, чтобы опустить или поднять ЛАХ и тем самым обеспечить переход с минус 20 дБ на минус 40 дБ на уровне не выше минус 6 дБ. В том случае, когда есть одна большая` постоянная времени, а остальные примерно одного порядка и малы, их заменяют суммарной постоянной
T = T1 + T2 + T3 + . . .
(T1p + 1)(T2p + 1) . . . = 1 + (T1 + T2 + T3 + . . .)p + (T1T2 + T1T3 + . . .)p2 + . . .
Поскольку постоянные времени малые, то правомочность такой замены обосновывается следующим образом. Сумма произведений двух малых величин при p2 будет много меньше, чем их сумма при p, поэтому суммой произведений можно пренебречь. Произведения при больших´ степенях будут ещё меньше.
Замечания.
1.При настройке П–регулятором, чем выше коэффициент передачи разомкнутой системы, тем меньше ошибка по установившейся скорости.
2.В том случае, когда Tэм 6 4Tя, настройка П–регулятором невозможна. Настроить систему можно только при использовании ПИ–регулятором. При этом надо обеспечить, чтобы пик на резонансной частоте находился ниже линии минус 6 дБ, иначе в переходном процессе на резонансной частоте будут происходить колебания.
3.К недостаткам одноконтурных систем относится то, что в них нет жёсткого ограничения величины допустимого тока двигателя. Поэтому при аварийных ситуациях, например, при заклинивании ротора, может произойти его перегрев.
Стандартной инженерной настройкой является настройка на модульный оптимум. Передаточная функция разомкнутой системы, настроенной на модульный оптимум
|
1 |
|
WМО = |
2T p(T p + 1). |
(3) |
ЛАХ разомкнутой системы имеет вид рис. ..., а переходная характеристика при замкнутой системы рис. ...
Переходные процессы по скорости и по току (по заданию и по возмущениям dM, dU). (влияние параметров регуляторов на переходный процесс)
Используя регулятор вида
WРС = РСp + 1, TРС
обычно числителем стараются скомпенсировать большую´ постоянную времени двигателя, следующую по величине постоянную времени принимают в качестве T , если она намного больше остальных, или в качестве T принимают сумму малых постоянных времени, если они одного порядка.
Оценка точности отработки задания и ошибки, вносимой возмущением (статическая ошибка, перерегулирование, время первого согласования, колебательность, время входа в установившийся режим)
14
Лекция №3
Двухконтурная система подчинённого регулирования (с подчиненным токовым контуром). Физика работы системы регулирования скорости двигателя при разгоне и в установившимся режиме. Физика работы системы регулирования скорости двигателя постоянного тока с подчиненным токовым контуром при изменении момента нагрузки.
Частотные характеристики системы ТП-ДПТ (скорость в зависимости от напряжения и от момента)
Принцип построения систем регулирования скорости с подчинённым токовым контуром Ограничение тока якоря. Настройки контуров тока и скорости.
В современных приводах одноконтурные системы управления практически не используются В них используются системы подчинённого регулирования вида рис. ...
Wр3 |
Wр2 |
Wр1 |
Wо1 |
Wо2 |
Wо3 |
Основным достоинствами таких систем является простота настройки и возможность легко обеспечить ограничения выходных координат.
В случае электропривода с двигателем постоянного тока независимого возбуждения будет иметь вид рис...
Использование ПИдля настройки контура тока с Tэм > 4Tя и Tэм < 4Tя (аналитический метод
настройки, метод настройки по ЛАХ) Возможность упрощения математического описания контура регулирования тока якоря при расчетах в системе подчиненного регулирования скорости двигателя постоянного тока.
Как видим схема достаточно отличается от представленной ранее: в ней присутствуют перекрёстные обратные связи. Чтобы упростить расчёты, обратной связью по ЭДС якоря пренебрегают. Возникающие из-за этого погрешности при расчётах мощных приводов невелики (когда Tэм Tя).
|
|
|
|
|
|
Iз |
|
Mст |
|
|
!з |
Wрс |
Wрт |
kтп |
kя |
kM |
1 |
! |
|||
|
Tтпp+1 |
|
Tяp+1 |
|
|
Jp |
|
|||
kE
Wдт
Wдс
Настройка контура тока производится, как правило, на модульный оптимум
|
kтп |
|
kя |
|
kдт |
|
||
WКТ = WРТ |
|
|
|
|
|
|
. |
(4) |
Tтпp + 1 |
Tяp + 1 |
Tдтp + 1 |
||||||
Здесь наибольшей постоянной времени является Tя, в следствие чего её и компенсируют регулятором тока. В качестве малой постоянной времени T выбирается Tп или Tтп + Tдт, если эти две постоянные времени соизмеримы.
Итак, нам нужно подогнать передаточную функцию (4) под (3). Принимая, рт = Tя, и T = Tтп и приравнивая (4) и (3), будем иметь
tauртp + 1 |
|
kтп |
|
kя |
|
kдт |
= |
|
1 |
; |
Tртp |
Tтпp + 1 |
Tяp + 1 |
Tдтp + 1 |
2T p(T p + 1) |
||||||
15
|
|
|
|
|
|
Iз |
|
Mст |
|
|
!з |
Wрс |
Wрт |
kтп |
kя |
kM |
1 |
! |
|||
|
Tтпp+1 |
|
Tяp+1 |
|
|
Jp |
|
|||
Wдт
Wдс
При Tдт Tтп в области значимых частот Tдтp + 1 1. Выполнив указанные выше подстановки, получим
Tяp + 1 |
|
kтп |
|
|
kя |
kдт |
= |
|
|
1 |
, |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Tртp |
Tтпp + 1 |
Tяp + 1 |
1 |
2Tтпp(Tтпp + 1) |
|||||||||||||
после сокращения |
|
1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|||
|
|
|
|
kтп kя kдт = |
|
|
|
, |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
Tртp |
|
2Tтпp |
|
||||||||||||
или |
|
|
|
|
|
kтпkяkдт |
|
|
1 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
= |
|
, |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
Tрт |
2Tтп |
|
|
|
|
|||||
откуда находим
Tрт = 2Tтпkтпkяkдт.
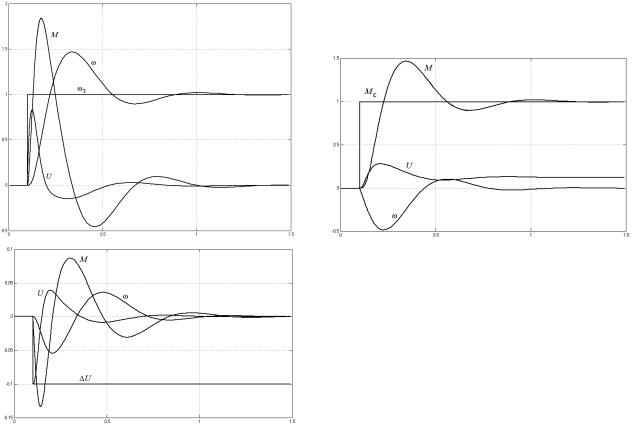
Переходные процессы по току (по заданию и по возмущениям dM, dU). (влияние параметров регуляторов на переходный процесс)
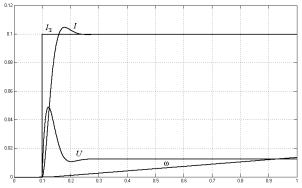
При такой настройке переходная характеристика по току в замкнутой системе будет иметь вид, рис....
1. В реальной системе при наличии насыщения в тиристорном преобразователе переходная характеристика будет иметь вид рис.... 2. Причина состоит в том, что по мере увеличения скорости ротора под действием момента, вызванного током, растёт противоЭДС двигателя Eя. Какое-то время напряжение Eп на выходе преобразователя растёт вместе с противоЭДС Eя, пока не дойдёт до ограничения. Двигатель продолжает разгоняться, а противо-ЭДС Eя расти. Разность Eп Eя начинает сокращаться, а следовательно начинает уменьшаться и ток двигателя.
Отметим также, что даже без учёта насыщения тиристорного преобразователя задание по току отрабатывается с установившейся ошибкой, вызванной наличием противо-ЭДС. Причём, величина этой ошибки тем меньше, чем медленнее происходит разгон ротора двигателя.
Отметим также, что регулятор тока компенсирует возмущения по ЭДС преобразователя Eп, но возмущения по моменту сопротивления не отрабатывает. При появлении возмущения по статическому моменту происходит просадка скорости, и как следствие снижение противо-ЭДС. При этом ток двигателя начинает возрастать. Стараясь поддерживать ток постоянным, регулятор тока начинает снижать ЭДС преобразователя, что приводит к снижению момента двигателя M и в итоге к дальнейшему снижению скорости.
Использование П-, ПИ- и ПИД-регуляторов для настройки контура скорости с Tэм > 4Tя и Tэм < 4Tя (аналитический метод настройки, метод настройки по ЛАХ) Настройка контура регулирования
скорости на оптимум по модулю и симметричный оптимум.
16
Рассмотрим следующий контур регулирования — контур скорости. Передаточная функция объекта управления — замкнутого контура тока будет иметь вид
1
2T p(T p+1)
КТ = 1 + 1
2T p(T p+1)
|
1 |
|
1 |
|
|
||
|
= |
|
|
kдт |
|
. |
|
kдт |
|
2T2p2 + 2T p + 1 |
|||||
Работать с таким звеном не очень удобно, поэтому членом 2T2p2 пренебрегают, и заменяют функцией
КТ 2T p + 1.
Тогда объект регулирования представляется в виде
Woc = КТ kJpM kдс = 2T p + 1 kJpM kдс.
Выбрав в качестве регулятора пропорциональное звено (Wрс = kрс), можно настроить систему на модульный оптимум, используя шаблон (3).
1
Wрс кт = 4T p(2T p + 1);
kрс |
1 |
|
1 |
|
кт = |
1 |
. |
|
2T p + 1 |
|
Jkдт |
p |
4T p(2T p + 1) |
||||
|
|
|
||||||
|
|
|
|
kдсkM |
|
|
|
|
Откуда находим
kрс = 4kдсkMT .
При такой настройке система будет отрабатывать задание по скорости со статической ошибкой, равной нулю, а перерегулирование будет составлять 4,3 %. Недостатком данной системы является то, что при воздействии момента сопротивления установившееся отклонение скорости не будет равно нулю, т. е. система будет обладать статизмом.
Статическая ошибка от изменения момента нагрузки в системе подчиненного регулирования при стандартных настройках (МО).
Для того, чтобы сделать систему астатической, её настраивают на симметричный оптимум. Система, настроенная на симметричный оптимум в разомкнутом состоянии имеет передаточную функцию
|
4T p + 1 |
|
||
WСО = |
|
|
, |
(5) |
|
|
|||
8T2p2 |
(T p + 1) |
|
||
Регулятор скорости подбирается в виде
рсp + 1 Wрс = Tрсp .
Приравняем шаблону упрощённую передаточную функцию объекта.
рсp + 1 |
kMkдс |
|
1 |
|
|
|
|
|
|
|
4T0p + 1 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
. |
||
|
|
|
|
|
2 |
+ 1 |
|
|
2 |
p |
2 |
|
||||||||
|
Tрсp |
Jkдсp T p |
|
|
|
|
8T0 |
|
|
(T0p + 1) |
||||||||||
Принимаем T0 = 2T , рс = 4T0 = 8T . После подстановки и сокращений получим |
||||||||||||||||||||
|
|
|
|
1 |
|
|
kMkдс |
= |
1 |
|
|
, |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
Tрсp |
|
Jkдсp |
32T2p2 |
|
|
||||||||||||
и окончательно
Tрс = 32T2 kMkдс .Jkдт
Переходные процессы по скорости и по току (по заданию и по возмущению dM, dU). (влияние
параметров регуляторов на переходный процесс)
Оценка точности отработки задания и ошибки, вносимой возмущением (статическая ошибка, перерегулирование, время первого согласования, колебательность, время входа в установившийся режим)
17
Реализация ограничений регулируемых координат в двухконтурной системе управления (мат. описание и исполнение ПИ-регуляторов, вид переходных процессов) Пуск системы под контролем тока, реализация такого пуска.
Ограничение тока в системах подчинённого регулирования обеспечивается установкой ограничения на задание тока на выходе регулятора скорости.
18
Лекция №4
Система двухзонного регулирования. Условия линеаризации. Линеаризованная схема Использование П-, ПИ- и ПИД-регуляторов для настройки регуляторов потока (аналитический метод настройки, метод настройки по ЛАХ) Переходные процессы по скорости и по току (по заданию и по возмущению dM, dU) во второй зоне регулирования. (влияние параметров регуляторов на переходный процесс) Оценка точности отработки задания и ошибки, вносимой возмущением (статическая ошибка, перерегулирование, время первого согласования, колебательность, время входа в установившийся режим)
Физика работы системы двухзонного регулирования скорости двигателя постоянного тока с подчиненным токовым контуром. Ограничение тока якоря. Ограничение выходного сигнала регулятора ЭДС, выбор уровня ограничения. Пуск системы подчиненного регулирования под контролем тока якоря и скорости.
Использование задатчиков интенсивности в системе регулирования скорости. Структура и принцип работы.
Использование фильтра на входе задания скорости. Использование вместо фильтра Смысл применения ИП-регулятора скорости взамен ПИ-регулятора. Структура ИП-регулятора.
При данной настройке системы установившаяся ошибка скорости по моменту будет равна нулю. Недостатком является большая´ величина перерегулирования в переходной характеристике, составляющая 43,3 %. Для уменьшения перерегулирования иногда ставится фильтр (апериодическое звено) с постоянной времени, равной 4 T0.
!з |
|
1 |
|
4T0p+1 |
. . . |
|
|
4T0p+1 |
|
|
|||
|
Tрс |
|
||||
|
|
|
|
|||
. . .
Это несколько затягивает переходный процесс, но позволяет снизить перерегулирование до 7 %.
То же можно получить и в более простой схеме, положив рс = |
4T0 |
|
Tрс |
||
|
!з |
|
1 |
|
рс |
|
Tрсp |
|||
|
|
|||
Использование дифференцирующих звеньев по обратной связи (для уменьшения колебаний) и по заданию (для компенсации момента инерции) Частотные характеристики и переходные процессы.
Система двухзонного регулирования
Регулирование скорости двигателя за счёт изменения потока возбуждения применяется в основном в системах двухзонного регулирования, в которых часть полного диапазона регулирования до номинальной (основной) скорости обеспечивается за счёт изменения напряжения на якоре от нуля до номинального значения при номинальном потоке возбуждения, а регулирование в верхней части диапазона при значениях скорости выше основной — за счёт воздействия на поток при постоянном напряжении на якоре или ЭДС двигателя.
Напомнить о сущности двухзонного регулирования, картинки привести для скорости, мощности и момента
Функциональная схема системы двухзонного регулирования. С двигателем и преобразователем Дифференциальные уравнения и структурная схема ДПТ НВ при регулировании потоком воз-
буждения
В крупных машинах достаточно заметным оказывается влияние вихревых токов, которые возникают в массивных частях магнитной системы двигателя при изменениях магнитного потока. Магнитодвижущая
19
сила этих токов препятствует изменению потока полюсов, замедляя процесс его нарастания и спадания С этой точки зрения действие вихревых токов может приближенно рассматриваться как действие расположенной на полюсах машины дополнительной коротко замкнутой обмотки. С учетом этого двигатель может быть представлен в виде рис.
8 Iя = (Eп Eя) |
|
|
kя |
; |
||||||||||
|
(1 + Tяp) |
|||||||||||||
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> Eя = cE !; |
|
|
|
|
|
|||||||||
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
= |
cM |
|
Iя |
; |
|
|
|
|
|
|||
> M |
|
|
|
|
|
|
|
|
|
|||||
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
! = |
|
|
|
(M Mст); |
|
||||||||
> |
|
|
|
|
||||||||||
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
Jp |
|
|
|
|
|
|
|
|
|
||
> |
|
|
|
|
|
|
|
|
|
|
||||
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
||
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
= (Uв |
|
|
|
IвRв) |
|
|
; |
||||||
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
2pп wвp |
||||
> |
|
|
|
|
|
|
|
|
||||||
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
(6) |
< |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> F = f ( ); |
|
|
|
|
|
|||||||||
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
F |
|
|
Iвкwвк |
|
|
|
|
||||
> |
|
|
|
|
|
|
|
|
||||||
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
, |
|
|
||
> Iв = |
|
|
|
|
|
|
|
|
||||||
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
wв |
|
|
|
|
|
|
||
> |
|
|
|
|
|
|
|
|
|
|
|
|||
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
2pп wв |
|
|
|
|
||||||
> |
|
|
|
|
|
|
|
|||||||
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> Iвк = |
|
|
|
|
|
|
|
|
p |
|
||||
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
Rвк |
|
|
|
|
|
||||
> |
|
|
|
|
|
|
|
|
||||||
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
>
>
>
>
>
>
>
>
:
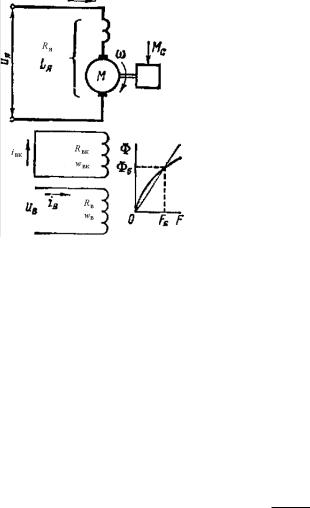
где f 1 — функция, обратная к f. wв и Rв — число витков обмотки возбуждения на полюс и её полное сопротивление; wвк и Rвк — число витков фиктивной короткозамкнутой обмотки вихревых токов на полюс и её полное сопротивление; Iв Iвк — токи в обмотке возбуждения и фиктивной коротко замкнутой обмотке; pп
— число пар полюсов; — коэффициент, связанный с коэффициентом рассеяния = 1,12 1,18 [Basharin] выражением = 1+(0,5+0,7) ( 1) и учитывающий то обстоятельство, что часть потока рассеяния сцеплена не со всеми витками обмотки возбуждения; F — намагничивающая сила; — полезный магнитный поток одного полюса.
Взамкнутой системе регулирования скорости переход от режима регулирования напряжением к режиму регулирования потоком возбуждения обеспечивается за счёт того, что на скоростях выше основной с помощью специального регулятора, воздействующего на цепь возбуждения, поддерживается равенство ЭДС двигателя номинальному значению. Поскольку ЭДС двигателя есть Eя = cE ! в условиях, когда Eя = const,
азначение ! задается входным сигналом, поток возбуждения будет изменяться обратно пропорционально скорости двигателя. ЭДС преобразователя в установившемся режиме выше ЭДС двигателя на значение падения напряжения в якорной цепи от тока Iя. Если момент нагрузки возрастет, то в условиях, когда скорость и ЭДС двигателя поддерживаются своими системами регулирования постоянными, возросшее падение напряжения в цепи якоря будет покрыто за счёт соответствующего увеличения ЭДС преобразователя при неизменном значении потока возбуждения.
Всистеме двухзонного регулирования рис. двигатель M питается от тиристорного преобразователя (ТП), а его обмотка возбуждения (ОВМ) — от тиристорного возбудителя (ТВ). Система управления электроприводом включает в себя две взаимосвязанные системы: а) воздействующую на напряжение ТП систему регулирования скорости с регулятором PC и подчиненным контуром регулирования тока якоря с регулятором РТ, аналогичную изученной нами ранее; б) систему регулирования ЭДС с регулятором ЭДС РЭ и подчинённым контуром регулирования тока возбуждения с регулятором РТВ. Подчинённый контур регули-
20
рования тока возбуждения замкнут по выходному напряжению датчика тока возбуждения (ДТВ)Входным сигналом для контура тока возбуждения является выходное напряжение регулятора ЭДС. Последнее ограничено с помощью блока ограничения величиной, соответствующей номинальному току возбуждения. На входе РЭ сравниваются постоянное значение задающего напряжения UЭ с напряжением датчика ЭДС ДЭ.
Структурная схема системы двухзонного регулирования.
Тиристорный возбудитель с тем же допущением, что и преобразователь в якорной цепи, представлен апериодическим звеном с постоянной времени Tтп; Tдв — постоянная времени фильтра на выходе ДТВ. В качестве рабочей точки, для которой производится настройка контуров регулирования приняты номинальные значения тока якоря, потока возбуждения, скорости, момента и ЭДС. Номинальным током возбуждения считается ток, соответствующий ном по кривой намагничивания.