


i |
уд |
= |
|
Um |
|
+ |
Um cos ψ |
|
= |
Um (1 + cos ψ) |
. |
||||
|
|
|
|
|
|
||||||||||
1 |
|
|
|
X 02 |
|
|
|
X 02 |
|
|
|
X 02 |
|
|
|
|
|
|
X1 |
− |
|
|
X1 − |
|
|
X1 − |
|
|
|||
|
|
X 2 |
X 2 |
X 2 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
Максимальное ударное значение тока имеет место при ψ=0.
i1уд(ψ=0) = |
2Um |
|||
|
|
. |
||
|
2 |
|||
|
X1 − |
X 0 |
|
|
|
X 2 |
|||
|
|
|||
Временная диаграмма токов показана на рис. 7.
Рис.7. Диаграмма токов при коротком замыкании трансформатора
При необходимости учета влияния активного сопротивления обмоток принцип нахождения решения сохраняется. В этом случае свободный ток iсв будет носить затухающий характер (пунктирная кривая).
3.4.Методы моделирования установившихся электромагнитных процессов
Математическая модель электромеханического преобразователя, составленная в системе координат α, β, в установившемся режиме работы
28
может быть получена из системы дифференциальных уравнений путем замены в них оператора дифференцирования d/dt на jω1.
Так, комплексные уравнения двухобмоточного трансформатора в матричной форме записи:
U |
|
|
r1 + jω1L1 |
|
jω1M |
|
I |
|
|
|
||
|
|
1 |
|
= |
|
|
|
|
• |
1 |
|
, |
|
|
|
|
|||||||||
−U 2 |
|
|
jω M |
r |
+ jω L |
|
I 2 |
|
||||
|
|
|
||||||||||
|
|
|
|
|
1 |
2 |
1 2 |
|
|
|
|
|
где знак «минус» перед напряжением вторичной обмотки указывает на то, что мощность оттуда снимается.
Перепишем систему уравнений в виде
U1 |
= I1r1 |
+ jω1 |
(M +l1)I1 |
+ jω1M I 2 |
; |
|
|
|||||||
−U |
2 |
= jω M I |
1 |
+ I |
2 |
r |
+ jω |
(M +l |
)I |
2 |
, |
|||
|
|
|
1 |
|
2 |
|
1 |
2 |
|
|
||||
где L1 = M +l1,
L2 = M +l2 .
Преобразуем последнюю систему уравнений к виду
U |
1 |
= I r + jω l I |
1 |
+ jω M (I |
1 |
+ I |
2 |
); |
|
|||||||||||
|
|
1 |
1 |
|
|
1 1 |
|
|
|
1 |
|
|
|
|
|
|
||||
−U 2 = I 2r2 |
+ jω1l2 I 2 |
+ jω1M (I1 |
+ I 2 ). |
|||||||||||||||||
Учитывая, что I 1 + I 2 |
= I 0 , |
а также, что |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
ω1l1 = x1 ; |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
ω1l2 = x2 ; |
|
|
|
|
|
|
|
|
|||||
имеем окончательно |
|
|
|
|
|
|
ω1M = x0 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
1 |
= I |
1 |
r |
+ jI |
1 |
x |
+ jx |
0 |
I |
0 |
; |
|
|
|
|||
|
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|||||
|
|
−U 2 = I 2 r2 + jI 2 x2 + jx0 I |
0 . |
|
||||||||||||||||
Полученной системе уравнений соответствует известная схема замещения трансформатора (рис.8).
29
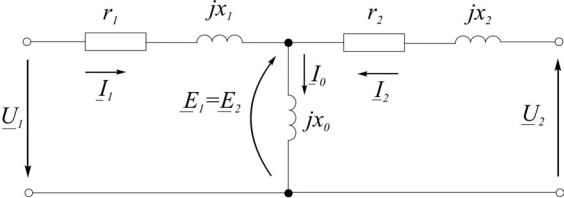
Рис.8. Схема замещения трансформатора
Она позволяет моделировать статические режимы работы трансформатора, когда U 1 =const, а I 2 может изменяться по амплитуде и
фазе, но этот процесс протекает во времени относительно медленно.
Рассмотрим теперь асинхронную машину. Для нее матричные уравнения, описывающие установившийся электромагнитный процесс, имеют следующий вид:
U1α |
r1α + jω1L1α |
jω1M |
|
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|
I1α |
|
||||||||||||
0 |
|
|
jω1M |
|
|
r2α + jω1L2α |
− L2βω |
|
|
|
|
− Mω |
|
|
|
I 2 |
α |
|
|||||||||||||||
|
|
= |
Mω |
|
|
L |
|
|
ω |
|
r |
+ jω L |
|
|
|
|
jω M |
|
|
|
|
I 2β |
. |
||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
2α |
|
|
|
2β |
|
|
|
|
1 2β |
|
|
|
|
|
1 |
|
|
|
|
|
|
|||||||
U1β |
|
0 |
|
|
|
|
0 |
|
|
|
|
|
jω M |
|
|
r |
|
+ jω L |
|
I1β |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
1β |
|
|
|
1 |
|
1β |
|
|
|
|
||
Представим уравнения в развернутом виде: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
U1α = r1α I1α + jω1L1α I1α + jω1M I 2α; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
U1β = r1β I1β + jω1L1β I1β |
+ jω1M I 2β; |
|
|
|
− L |
|
|
ωI |
|
|
|
|
|
|
|||||||||||||||||
|
|
0 |
= r |
I |
2α |
|
+ jω L |
I |
2α |
+ jω M I |
1α |
− MωI |
1β |
|
|
2β |
; |
|
|
|
|||||||||||||
|
|
0 |
2α |
I |
|
1 2α |
|
|
1 |
|
|
|
|
|
2β |
|
|
|
|
|
|
||||||||||||
|
|
= r |
2β |
+ jω L |
I |
2β |
+ jω M I |
1β |
+ MωI |
1α |
+ L |
|
ωI |
2β |
. |
|
|
|
|||||||||||||||
|
|
|
2β |
|
|
1 2β |
|
|
|
1 |
|
|
|
|
|
2α |
|
|
|
|
|
|
|
||||||||||
Рассматриваемая машина имеет две идентичные фазные обмотки, следовательно,
r1α = r1β = r1, r2α = r2β = r2 ,
L1α = L1β = l1 + M , L2α = L2β = l2 + M .
30
С учетом этого получаем (осуществив переход к индуктивным сопротивлениям)
U1α = r1 I1α + jx1 I1α + jx0 (I1α + I 2α ); |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
U1β = r1 I1β + jx1 I1β + jx0 (I1β + I 2β); |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
0 = r I |
|
|
+ jx |
|
|
I |
|
|
+ jx |
|
|
(I |
|
|
+ I |
|
) − x |
|
I |
|
|
ω |
−(x |
|
|
+ x |
|
)I |
|
|
ω |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
|||||||||||||||
2α |
2 |
2α |
0 |
1α |
2α |
0 |
1β ω |
2 |
0 |
2β ω |
||||||||||||||||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
||||||
0 = r |
I |
|
+ jx |
|
|
I |
|
+ jx |
|
|
(I |
|
+ I |
|
) + x |
|
I |
|
|
ω |
+ (x |
|
+ x )I |
|
|
ω |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|||||||||||||||||||
2β |
2 |
2β |
0 |
1β |
2β |
0 |
1α ω |
2 |
2α ω |
|
||||||||||||||||||||||||||||
2β |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
||||||||
Преобразуем систему уравнений к виду
U1α = r1 I1α + jx1 I1α + jx0 I 0α; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
U1β = r1 I1β + jx1 I1β + jx0 I 0β; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
0 |
= r I |
|
|
+ jx |
|
|
I |
|
|
+ jx |
|
|
I |
|
|
− x I |
|
|
|
ω |
− x |
|
|
I |
|
|
ω |
− x |
I |
|
|
ω |
; |
|
, |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
2α |
2 |
2α |
0 |
0α |
1β ω |
2 |
2β ω |
2β ω |
||||||||||||||||||||||||||||||||||||||||
|
2 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
||||||||
|
= r |
I |
|
+ jx |
|
|
I |
|
+ jx |
|
|
I |
|
+ x |
|
I |
|
|
ω |
+ x |
|
|
I |
|
|
ω |
|
+ x |
|
I |
|
|
ω |
|
|
|||||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
||||||||||||||||||||||
2β |
2 |
2β |
0 |
0β |
0 |
1α ω |
2 |
2α ω |
|
0 |
2α ω |
|
||||||||||||||||||||||||||||||||||||
|
2β |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
1 |
|
||||||||
где I 0α = I1α + I 2α ;
I 0β = I1β + I 2β.
Переписываем систему из четырех уравнений, произведя группировку членов уравнений для роторных цепей,
U1α = r1 I1α + jx1 I1α + jx0 I 0α; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
U1β = r1 I1β + jx1 I1β + jx0 I 0β; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
0 = r I |
|
|
+ jx |
|
|
I |
|
|
+ jx |
|
|
I |
|
|
− x |
|
|
I |
|
|
ω |
− x |
|
|
I |
|
|
ω |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
||||||||||||||
2α |
2 |
2α |
0 |
0α |
0 |
0β ω |
2 |
2β ω |
|||||||||||||||||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
||||||
0 = r |
I |
|
+ jx |
|
|
I |
|
+ jx |
|
|
I |
|
+ x |
|
I |
|
|
ω |
+ x |
|
|
I |
|
|
ω |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
||||||||||||||||||
2β |
2 |
2β |
0 |
0β |
0 |
0α ω |
2 |
2α ω |
|
||||||||||||||||||||||||||||
2β |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|||||||
Умножив члены 2-го и 4-го уравнения на j и сложив почленно 1-е уравнение со 2-м, а 3-е с 4-м, получаем
U1 = r1 I1 + jx1 I1 + jx0 I 0 ; |
|
|
|
||
|
|
ω |
|
ω |
|
0 = r2 I |
2α + jx2 I 2 + jx0 I 0 − jx0 I 0 |
− jx2 I 2 |
|
||
|
|
. |
|||
ω |
ω |
||||
|
1 |
1 |
|
||
31

Произведя группировку членов 2-го уравнения, записываем:
U1 = r1 I1 + jx1 I1 + jx0 I 0 ; |
|
|
|
|
|
|
|
|||
|
ω |
|
|
|
ω |
|
||||
0 = r2 I 2α + jx2 I 2 (1 − |
+ jx0 I 0 |
(1 − |
|
|||||||
|
) |
|
). |
|||||||
ω |
ω |
|||||||||
|
1 |
|
|
|
|
|
1 |
|
|
|
Имея в виду, что скольжение |
s = |
ω1 −ω |
=1− |
ω |
, окончательно |
|||||
ω |
||||||||||
|
|
|
|
ω |
|
|
|
|||
|
|
|
|
1 |
|
|
1 |
|
||
получаем известную математическую модель асинхронной машины в установившемся режиме:
U |
1 |
= r I |
1 |
+ |
jx I |
1 |
+ |
jx |
0 |
I |
0 |
; |
|
|||
|
|
r |
1 |
|
1 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0 = |
|
2 |
I 2α |
+ jx2 I |
2 + jx0 I |
0 |
, |
|||||||||
s |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где |
I 0 = I 1 + I 2 . |
Этим уравнениям напряжений соответствует Т-образная схема замещения (рис.9).
Рис.9. Т-образная схема замещения асинхронной машины
Полученная математическая модель позволяет представить основные соотношения и показатели работы асинхронной машины в уставившемся режиме через параметры схемы замещения. Так, комплексное входное сопротивление
|
|
|
|
|
jx0 |
( |
r2 |
+ jx2 ) |
||
z |
|
r1 |
+ jx1 |
+ |
s |
|||||
= |
|
|
|
|
= |
|||||
r2 |
|
|
|
|
||||||
|
|
|
|
|
+ j(x0 + x2 ) |
|||||
|
|
|
|
|
s |
|||||
|
|
|
|
|
|
|
|
|
|
|
32

|
|
|
r2 |
( |
r2 |
|
− x2 x0 ) + ( |
r2 |
|
x0 + x2 )(x2 + x0 ) |
|
|
|
|
|
|||||||||||||||||||||
|
|
s |
s |
|
|
|
|
|
|
|
||||||||||||||||||||||||||
= |
r + |
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
1 |
|
|
|
|
|
|
|
r |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
( |
2 |
) |
|
+ |
|
(x2 + x0 ) |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
r2 |
|
( |
r2 |
x |
|
|
+ x |
|
|
) |
−( |
r2 |
− x |
x |
|
)(x |
|
+ x |
|
) |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|||||||||||||||||||
|
+ |
|
|
j[x + |
s s |
|
0 |
|
|
|
2 |
|
|
|
|
2 0 |
|
|
2 |
|
0 |
|
] = |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
2 |
) |
|
+ (x2 + x0 ) |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
=r + jx .
Ток в фазе обмотки статора
I 1 = |
U 1 |
= |
U 1 |
= |
U 1 (r − jx) |
= |
U 1r − jU 1 x |
= |
|
z |
r + jx |
(r − jx)(r + jx) |
r 2 + x2 |
||||||
|
|
|
|
|
=Uz12r − j Uz12x = I1α − jI1r ,
где z = r2 + x2 |
- модуль комплексного сопротивления z; |
|||||||||||
I1a , I1r |
- активная и реактивная составляющие полного |
|||||||||||
тока I1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
I1 = I1a 2 + I1r 2 = |
|
|
U1 |
. |
|||||||
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
z |
|||
Коэффициент мощности |
|
|
U1r |
|
|
|
|
|
|
|||
|
|
I1a |
|
|
|
|
r |
|
||||
|
cos ϕ = |
= |
|
z2 |
|
|
= |
. |
||||
|
|
|
|
|
|
|
||||||
|
1 |
I1 |
|
U1 |
|
|
|
|
z |
|||
|
|
|
|
|
|
|
||||||
z
Подводимая в двигательном режиме активная мощность
P1 = mU1I1 cos ϕ1 = mU1 Uz1 rz = mr(Uz1 )2 ,
где m – число фаз машины.
ЭДС, индуктируемая в обмотках машины,
E |
= E |
2 |
= I |
z |
П |
= U1 |
(r − r )2 |
+ (x − x )2 |
, |
1 |
|
1 |
|
z |
1 |
1 |
|
||
|
|
|
|
|
|
|
|
|
где zП - модуль комплексного эквивалентного сопротивления двух параллельных ветвей схемы замещения.
33

|
Ток в обмотке ротора |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
E' |
2 |
|
|
U |
1 |
|
(r − r ) |
2 + (x − x )2 |
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
I '2 = |
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
, |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
z'2 |
|
|
|
z |
|
|
|
|
|
|
r |
'2 |
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
s |
) |
|
|
+ x'2 |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где |
z'2 |
= |
( |
r' |
2 ) |
2 |
2 |
- |
|
|
модуль комплексного сопротивления цепи |
||||||||||||||||||||||||||||||||||||
|
|
+ x'2 |
|
|
|||||||||||||||||||||||||||||||||||||||||||
ротора. |
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Электромагнитная мощность |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 r'2 |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E1 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
Pэм= mE2 I2 cos ψ2 = m |
|
|
|
|
|
|
|
|
|
s |
, |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
r' |
2 |
|
|
2 |
2 |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
|
|
) |
|
|
+ x'2 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
||
где |
ψ2 |
- угол между E 2 и I 2 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r'2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
cos ψ2 |
= |
|
|
|
r' |
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
( |
2 |
) |
2 |
|
+ x'2 |
|
2 |
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Электромагнитный момент (без учета падения напряжения на |
||||||||||||||||||||||||||||||||||||||||||||||
сопротивлении обмотки статора) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 r'2 |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Pэм |
|
|
|
|
|
Pэм |
|
|
|
mp |
|
|
|
|
|
|
|
U1 |
|
|
||||||||||||||||
|
|
|
|
|
|
|
M |
эм |
= |
= |
|
|
≈ |
|
|
|
|
|
|
|
|
|
|
s |
|
|
, |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
ω |
|
|
|
2πf |
|
|
|
|
|
|
r'2 |
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2πf1 |
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
( |
|
|
|
) |
|
|
+ xk |
|
|
||||||||
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
s |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
где |
|
– число пар полюсов машины; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
xk = x1 + x'2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Зависимость |
|
M эм = f (S) , |
построенная по последнему выражению, |
|||||||||||||||||||||||||||||||||||||||||||
имеет известный вид (рис.10). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
34

Рис.10. Механическая характеристика асинхронного двигателя
Аналогично могут быть получены выражения и для других показателей асинхронной машины, работающей в установившемся режиме.
В общем случае уравнения Парка-Горева для явнополюсной синхронной машины имеют вид
u |
= r i |
+ |
|
d |
ψ |
1d |
+ ωψ |
|
; |
||||||||
|
|
|
|
|
|||||||||||||
1d |
1d 1d |
|
|
|
dt |
|
|
|
|
1q |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
||||
u |
= r i |
+ |
ψ |
|
−ωψ |
|
|
; |
|
||||||||
|
|
|
|
|
|
||||||||||||
1q |
1q 1q |
|
|
dt |
|
1q |
|
1d |
|
|
|||||||
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
||
u2d |
= r2d i2d + |
|
ψ2d ; |
|
|
|
|
||||||||||
dt |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
||
0 = r2qi2q + |
ψ |
2q . |
|
|
|
|
|
||||||||||
|
|
|
|
|
|||||||||||||
|
|
|
dt |
|
|
|
|
|
|
|
|
||||||
В системе координат d,q для перехода от дифференциальных уравнений электромеханического преобразования к уравнению установившегося режима следует произвести замену d/dt на js, ω на 1-s.
Тогда, для любого установившегося режима, справедливо:
U1d |
= r1d I1d |
+ jsψ |
+ (1 − s)ψ |
|
; |
|||
U1q |
= r1q I1q |
+ jsψ |
1d |
−(1 − s)ψ |
|
1q |
||
1q |
1d |
; |
||||||
|
|
|
|
|
|
|||
U 2d = r2d I 2d + jsψ2d ; |
|
|
|
|||||
0 = r2q I 2q + jsψ |
|
. |
|
|
|
|
||
2q |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
35
В синхронном режиме работы s=0, следовательно,
U |
1d |
= r I |
1d |
+ ψ |
1q |
; |
|
1d |
|
|
|||
U1q = r1q I1q −ψ1d ; |
||||||
U2d = r2d I2d . |
|
|
||||
|
|
|||||
Учитывая, что в режиме синхронного вращения I2q = 0 , а ток I2d является током возбуждения,
ψ1q = xq I1q + xaq I2q = xq I1q ;
ψ1d = xd I1d + xad I2d = xd I1d + xad I f .
Имея в виду, что r1d = r1q = r и переходя к общепринятым в теории синхронных машин обозначениям, получаем
|
Ud |
= rId + xq Iq ; |
|
|
Uq |
|
|
|
= rIq − xd Id + E f ; |
||
|
U f |
= rf I f , |
|
|
|
||
где |
ЭДС, индуктируемая потоком возбуждения в обмотке якоря, |
||
E f |
= −xad I f . |
|
|
Полученным уравнениям соответствует на пространственновременной плоскости диаграмма токов и напряжений синхронного двигателя (перевозбужденного) (рис.11).
36

Рис.11. Диаграмма токов и напряжений синхронного двигателя
Продольная и поперечная составляющие напряжения
Ud =U sin θ;
Uq =U cos θ,
где θ - временной угол между векторами напряжения U и ЭДС - E f .
Поскольку в машинах большой и средней мощности относительная величина активного сопротивления обмотки статора составляет r<0,01 (о.е.), то на векторной диаграмме он может быть приравнен пространственному углу между вектором ЭДС - Eδ , наводимой в фазной
обмотке результирующим магнитным потоком машины, и вектором
− E f .
Тогда система уравнений синхронной машины приобретает вид
U sin θ = rId + xq Iq ; |
|
U cos θ = rIq − xd Id |
|
+ E f ; |
|
U f = rf I f . |
|
|
37

Решим уравнения относительно токов. Из первого уравнения
Id = U sin θr− xq Iq .
Подставив ток Id во второе уравнение, имеем
U cos θ = rIq − xd (U sinrθ− xq Iq ) + E f .
После преобразования получаем
Iq = |
rU cos θ+ xdU sin θ− E f r |
= |
xdU sin θ+ r(U cos θ− E f ) |
. |
|||
r2 |
+ xd xq |
r2 |
+ xd xq |
||||
|
|
|
|||||
Подставим Iq в первое уравнение
Id |
= |
− xq (U cos θ− E f ) + rU sin θ |
= |
xq (E f |
−U cos θ) + rU sin θ |
. |
|
r2 + xd xq |
|
r2 |
+ xd xq |
||||
|
|
|
|
|
|||
Ток возбуждения
I f = Urff .
Результирующий ток
I =  Id 2 + Iq 2 .
Id 2 + Iq 2 .
Угол ϕ между напряжением U и током I
ϕ = θ+ψ,
где угол между векторами -E и I может быть найден в виде
|
Id |
|
xq (cos θ− |
E f |
) |
|
|
ψ = arctg(− |
) = arctg |
U |
. |
||||
|
|
||||||
Iq |
xd sin θ |
|
|||||
|
|
|
|
||||
38

Получим выражение электромагнитной мощности через токи и потокосцепления:
Pэм = ψq Id −ψd Iq = xq Iq Id −(xd Id − E f )Id Iq = |
|
|
|
|
|
||||||||||||||||||||||||
|
|
U sin θ E f −U cos θ |
|
|
|
E f −U cos θ |
|
U sin θ |
|
|
|
||||||||||||||||||
= xq |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- (xd |
|
|
|
|
− E f ) |
|
= |
|
|||||
|
|
xq |
|
|
xd |
|
|
|
|
xd |
|
|
xq |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
= |
UE f |
|
|
sin θ−U 2 sin θcos θ |
1 |
+U 2 sin θcos θ |
1 |
= |
||||||||||||||||
|
|
|
|
|
|
xd |
|
|
|
xd |
|
xq |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
= |
UE f |
sin θ+ |
U 2 |
|
( |
1 |
− |
1 |
|
) sin 2θ = |
|
|
|
|
|
|
|
||||||||||||
|
xd |
|
|
2 |
|
xq |
xd |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= P |
' |
+ P |
'' , |
|
|
|
|
|
|
|
||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
эм |
|
эм |
|
|
|
|
|
|
|
|||
где sin θcos θ= |
sin 2θ. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Зависимость Pэм= f (θ) показана на рис.12.
Рис.12. Угловая характеристика электромагнитной мощности
Электромагнитный момент
M эм = |
UE f |
|
U 2 |
1 |
1 |
|
|||||
|
|
sin θ+ |
|
( |
|
|
− |
|
|
) sin 2θ, |
|
ω x |
d |
2ω |
x |
q |
x |
d |
|||||
|
1 |
|
1 |
|
|
|
|
|
|||
где ω1 = 2πf / p = 2πpn / 60 p = πn / 30; n – частота вращения, об/мин.
39
В системе о.е. (при U =Uном =Uδ ): |
|
|
|
|
|
|
|||||
P |
= M |
эм* |
= |
E f |
sin θ+ |
1 |
( |
1 |
− |
1 |
) sin 2θ. |
|
|
|
|
||||||||
эм* |
|
|
xd |
|
2 |
|
xq |
|
xd |
|
|
|
|
|
|
|
|
|
|
||||
Полученная математическая модель позволяет анализировать установившийся режим синхронной машины.
Машины постоянного тока обычно выполняются с несколькими обмотками. Между обмоткой вращающегося якоря и обмоткой статора при нагрузке возникают сложные взаимодействия. Поэтому их математические модели – это уравнения многообмоточных машин.
Вопросы для самоконтроля
1.Назовите основные методы решения дифференциальных уравнений электромеханических преобразователей.
2.Какой метод называется классическим?
3.В чем состоит сущность операторного метода?
4.Какой вид имеет преобразование Лапласа?
5.Как перейти от дифференциальных уравнений электромеханического преобразования к уравнениям установившегося режима?
6.Запишите модель установившегося режима работы трансформатора.
7.Какой вид имеет математическая модель асинхронной машины в установившемся режиме?
8.Дайте характеристику модели явнополюсной синхронной машины, работающей в установившемся режиме.
40