

2.4 Расчет динамики системы автоматического регулирования
2.4.1 Анализ устойчивости системы автоматического регулирования
Структурная схема САУ тиристорного электропривода в динамике имеет вид:
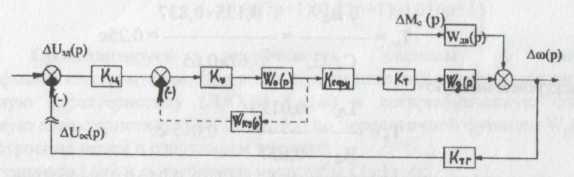
Рисунок 4-Структурная схема САУ тиристорного электропривода в динамике
Определяем динамические характеристики отдельных звеньев структурной схемы. Звенья с коэффициентами передачи Кц , Ку , Ксфу , Кт, Ктг считаем безынерционными. На входе системы импульсно – фазового управления установлено апериодическое звено с передаточной функцией:
 (99)
(99)
То=0,007с
Передаточная функция двигателя по управляющему воздействию имеет
вид:
(100)
Выражение
для передаточной функции двигателя
необходимо привести к виду передаточных
функций типовых динамических звеньев.
Рассчитываем момент инерции, приведенный к валу двигателя по формуле:
 (101)
(101)
Определяем коэффициенты передачи двигателя:
 (102)
(102)
 (103)
(103)
Определяем постоянные переменные:
-электромеханическую:
 (104)
(104)
-электромагнитную:
 (105)
(105)
При этом выполняется соотношение: Тм>4Тэ , 0,7>0,0073·4=0,03
В этом случае знаменатель передаточной функции может быть представлен в виде: (Т1р+1)(Т2р+1)
Для определения постоянных времени Т1 и Т2 решаем уравнение:
ТмТэр2+Тмр+1=0 (106)
 (107)
(107)


 (108)
(108)
 (109)
(109)
Передаточная функция разомкнутой системы по управляющему воздействию:
 (110)
(110)
Принимаем для расчета наибольший коэффициент усиления разомкнутой системы, который имеет место при работе на НДПР, Кр=613

Проанализируем устойчивость системы с помощью логарифмического критерия. Для этого строим амплитудно-частотную характеристику (ЛАХЧ) Lнс(ω) и логарифмическую фазово – частотную характеристику (ЛФХЧ) φнс(ω) по передаточной функции Wр(р).
Построение графика ведем в следующем порядке:
1-строим оси Lнс(ω) и ω, выбираем масштабы Lнс(ω) и ω;
2-определяем величину 20lgКр, и откладываем ее на оси ординат против отметки 0 декад,
20lgКр=20lg 2017=66,6 дБ.
3- находим сопрягающие частоты и наносим их на оси частот
 lgωс1=lg1=
0 дек; (111)
lgωс1=lg1=
0 дек; (111)
 lgωс2=lg142,9=4,9
дек; (112)
lgωс2=lg142,9=4,9
дек; (112)
 lgωс3=2,16дек; (113)
lgωс3=2,16дек; (113)
Логарифмическая
фазово – частотная характеристика
(ЛФХЧ) φнс(ω)
строится путем алгебраического
суммирования логарифмических фазовых,
частотных характеристик апериодических
звеньев φ1(ω),
φ2(ω),
φ3(ω)
с постоянными времени Т1,
,Т2
,Т0
, 
Фнс(ω) = φ1(ω)+ φ2(ω)+ φ3(ω) (114)
φ1(ω)=-arctgТ1ω=-arctg 0,018ω
φ2(ω)=-arctgТ2ω=-arctg 0,0008ω
φ3(ω)=-arctgТ3ω=-arctg 0,007ω
Результаты расчета заносим в таблицу.
Таблица 8 - Результаты расчетов
|
ω |
с-1 |
0,1 |
0,5 |
1 |
5 |
10 |
50 |
100 |
500 |
1000 |
|
Lgω |
дек |
-1 |
-0,3 |
0 |
0,7 |
1 |
1,7 |
2 |
2,7 |
3 |
|
Т1 ω |
|
0,1 |
0,5 |
1 |
5 |
10 |
50 |
100 |
500 |
1000 |
|
arctg T1(ω) |
эл.град |
-5о7' |
-8о5' |
-45о |
-74о1' |
-84о3 |
-89о3' |
-89о7' |
-90о |
-90о |
|
Т2 ω |
|
0,0007 |
0,0035 |
0,007 |
0,035 |
0,07 |
0,35 |
0,7 |
3,5 |
7 |
|
arctg T2(ω) |
эл.град |
-0 о |
-0о12' |
-0о24' |
-2 о |
-4 о |
-29о |
-35о |
-74о |
-82о |
|
φ(ω) |
эл.град |
-5о7' |
-8 о 62' |
-0 о 24' |
-76о1' |
-88о3' |
-108о3' |
-124о7' |
-164о |
-172о |