

-
Сельсины – конструкция, принцип работы и характеристики. Трансформаторный режим.
В трансформаторном режиме к ведомой оси приложен значительный момент сопротивления. Поэтому угол рассогласования отрабатывается в этом случае с помощью исполнительного двигателя. Появляющееся в обмотке возбуждения выходное напряжение подается через усилитель на обмотку исполнительного двигателя. Сельсины могут работать в режиме поворота и в режиме вращения. В первом случае имеем статическую ошибку системы синхронной связи, а во втором ошибка рассогласования определяет динамическую точность системы.
-
Вращающиеся (поворотные) трансформаторы
Вращающимися трансформаторами называют электрические микромашины переменного тока, предназначенные для преобразования угла поворота Θ в напряжение, пропорциональное некоторым функциям угла (например, sinΘ или cos Θ) или самому углу поворота ротора.
Вращающиеся трансформаторы (ВТ) применяют в аналого-цифровых преобразователях «угол – амплитуда –код» и «угол – фаза – код» цифровых следящих систем и систем программного управления промышленными роботами и автоматами; в системах дистанционной передачи угла повышенной точности и в электромеханических вычислительных устройствах, предназначенных для решения тригонометрических задач и преобразования координат.
Возможны несколько режимов работы вращающихся трансформаторов в зависимости от схемы включения их обмоток:
1) синусно – косинусные ВТ, у которых выходное напряжение одной обмотки пропорционально синусу угла поворота ротора, а другой обмотки – косинусу угла поворота ротора (СКВТ);
2) линейные ВТ, у которых выходное напряжение пропорционально углу поворота ротора (ЛВТ); получение линейной в определенном угловом диапазоне выходной характеристики сводится к аппроксимации прямой линии функцией типа f(Θ)=sinΘ/(1+C*cosΘ), где С – постоянный коэффициент;

-
Асинхронные тахогенераторы. Принцип действия. Характеристики. Погрешности.
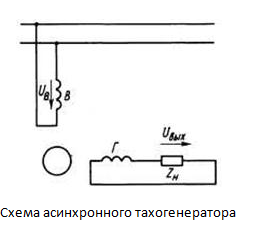
Принцип действия. Конструкция асинхронного тахогенератора аналогична конструкции асинхронного исполнительного двигателя с полым немагнитным ротором. На статоре в пазах уложены две обмотки, сдвинутые в пространстве на 90°. Одна из обмоток В (возбуждения) постоянно включена в сеть, другая обмотка Г (генераторная) присоединена к нагрузке Zн (рис. 6.25), т. е. является выходной. По обмотке В проходит переменный ток, в результате чего создается магнитный поток Φd, пульсирующий с частотой сети f1. Этот поток распределен в пространстве практически синусоидально и его ось совпадает с осью обмотки возбуждения (рис. 6.26, а), называемой продольной осью d—d. Соответственно поток, создаваемый обмоткой возбуждения, называют продольным. Ось q — q, перпендикулярную оси обмотки возбуждения, называют поперечной
Причины погрешностей. Основной показатель качества работы тахогенератора—линейность выходной характеристики. Причинами, вызывающими погрешности тахогенератора, т. е. отклонение выходной характеристики от линейной зависимости, являются:
а) технологические неточности при изготовлении;
б) электромагнитная реакция ротора, изменяющая значения потоков Φd и Φq при изменении режима работы тахогенератора (частоты вращения и нагрузки);
в) изменение некоторых параметров при изменении частоты вращения (например, сопротивления полого ротора);
г) изменение сопротивления обмоток и магнитного сопротивления по различным осям под влиянием температуры, насыщения и др.
