

-
Особенности конструкции и принципа работы шагового двигателя активного типа.
Шаговые синхронные двигатели активного типа. В отличие от синхронных машин
непрерывного вращения шаговые двигатели имеют на статоре явно выраженные
полюса, на которых расположены катушки обмоток управления.
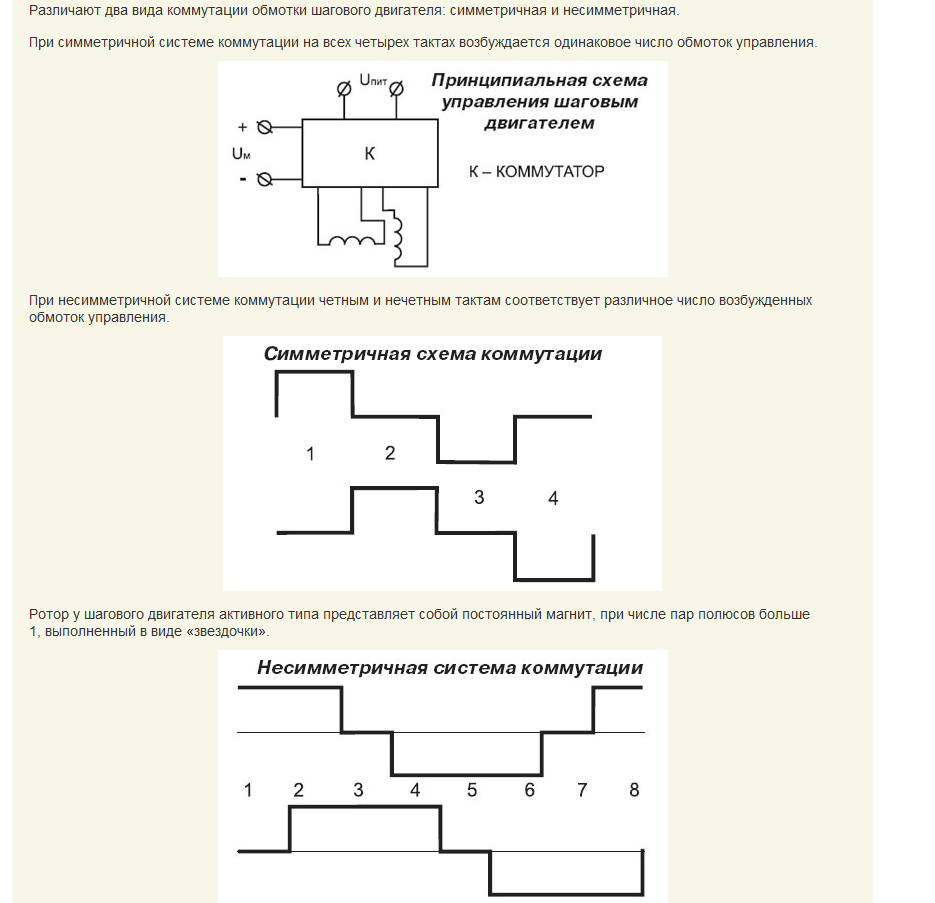
Различают два вида коммутации обмотки шагового двигателя: симметричная и несимметричная.
При симметричной системе коммутации на всех четырех тактах возбуждается одинаковое число обмоток управления
-
Особенности конструкции и принципа работы реактивного шагового двигателя.
У активных шаговых двигателей есть один существенный недостаток: у них крупный шаг, который может достигать десятков градусов.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
Отличительной особенностью реактивного редукторного двигателя является расположение зубцов на полюсах статора
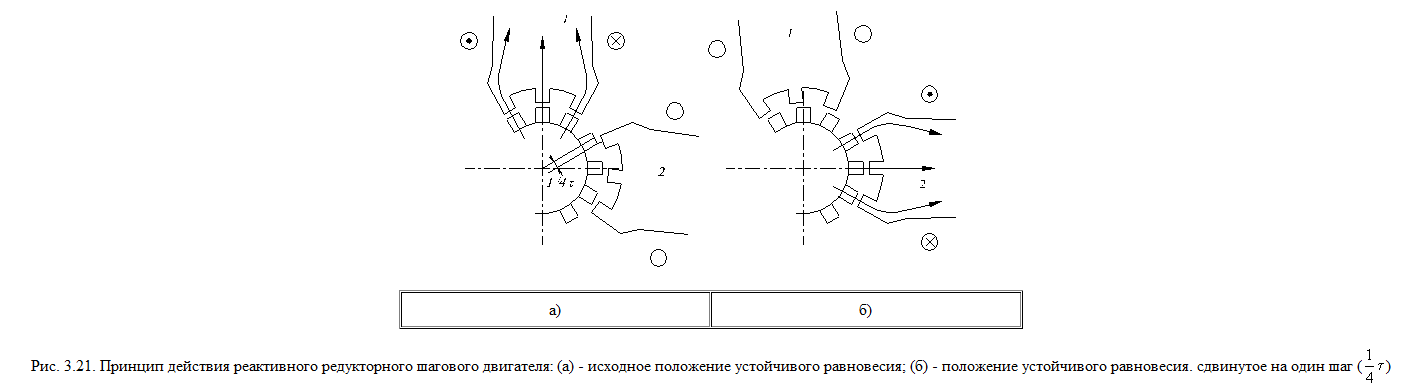
Если зубцы ротора соосны с одной диаметрально расположенной парой полюсов статора, то они сдвинуты относительно каждой из оставшихся трех пар полюсов статора соответственно на ј, Ѕ и ѕ зубцового деления.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышение степени редукции шаговых двигателей, как активного типа, так и реактивного, можно достичь применением двух, трех и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов два, то этот сдвиг равен 1/2 зубцового деления, если три, то - 1/3, и т.д. В то же время роторы-звездочки каждого из пакетов не имеют пространственного сдвига, т.е. оси их полюсов полностью совпадают.
-
Особенности конструкции и принципа работы линейного шагового двигателя.
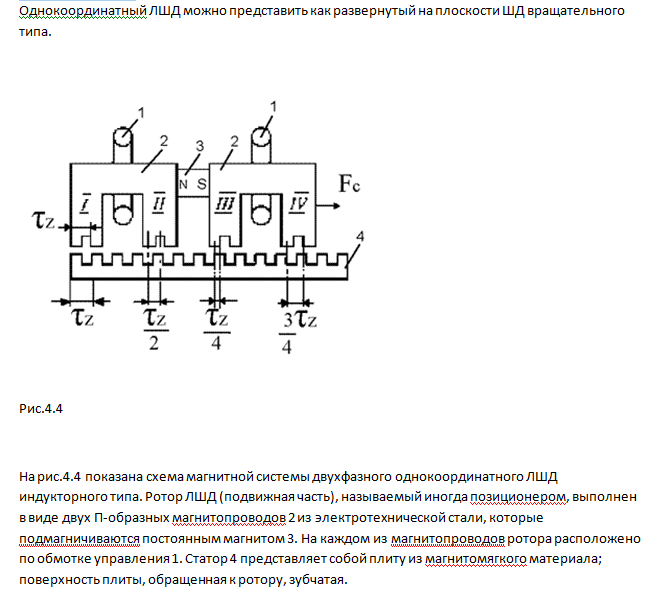
Линейные шаговые двигатели (ЛШД) преобразуют импульсную команду непосредственно в линейное перемещение. Это позволяет значительно упрощать кинематическую схему ряда электроприводов, устраняя механические преобразователи вращательного движения в поступательное.
На базе ШД и ЛШД могут быть созданы многокоординатные исполнительные механизмы, осуществляющие сложные перемещения в декартовой, цилиндрической и сферической системах координат.
-
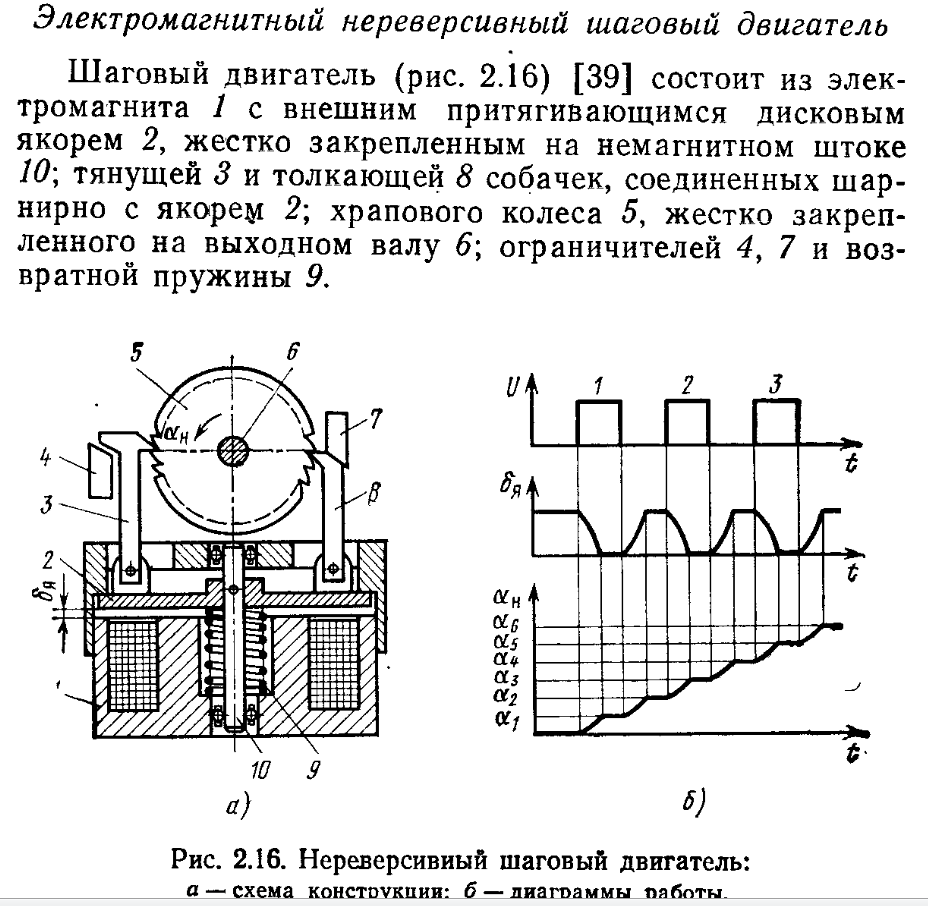
Шаговый двигатель нереверсивного типа.
-
Сельсины – конструкция, принцип работы и характеристики. Индикаторный режим.
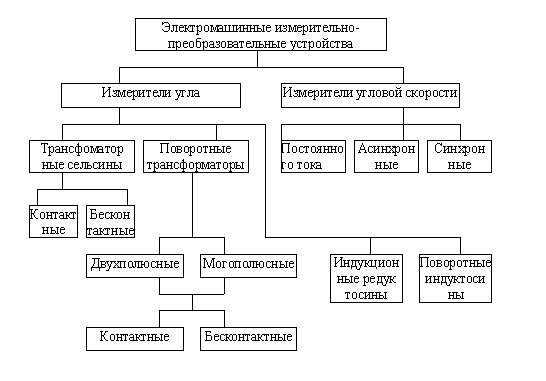
Классификация основных типов электромашинных измерительно-преобразовательных устройств, применяемых для реализации обратных связей по углу и скорости, приведена
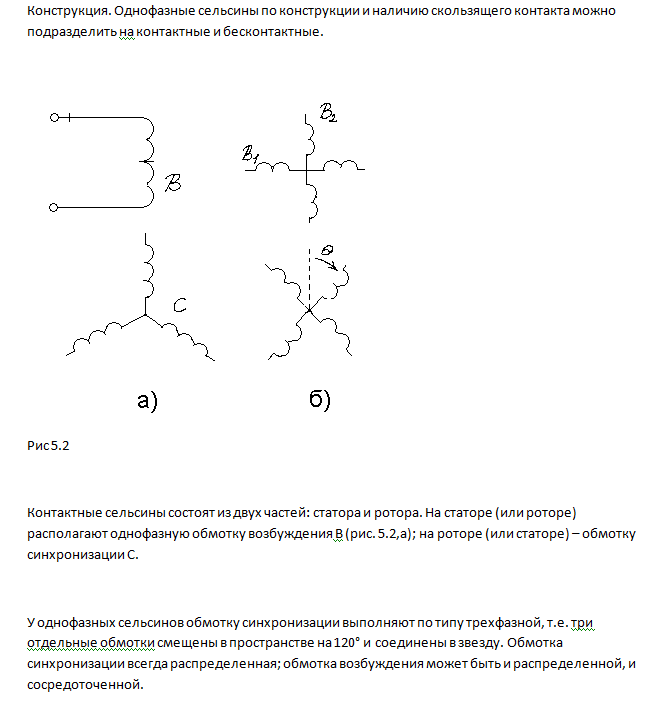
Сельсинами называют электрические микромашины переменного тока,обладающие способностью самосинхронизации и применяемые в синхронных системах дистанционной передачи угла в качестве датчиков и приемников. Передача угловой величины в такой системе происходит синхронно, синфазно и плавно. При этом между устройством, задающим угол (датчиком), и устройством, принимающим передаваемую величину (приемником), существуют только электрические соединения в виде линии связи.
Индикаторный режим используется при отсутствии другого исполнительного двигателя. Синхронизирующий момент между валами сельсина- датчика и сельсина- приемника создается при наличии некоторого пространственного угла =-, называемого углом рассогласования. Появляющиеся при этом ЭДС обеспечивают протекание тока по обмоткам синхронизации датчика и приемника. В результате в сельсине- приемнике возникает момент, старающийся повернуть его вал на угол равный углу поворота датчика. Из - за наличия механической нагрузки на валу приемника угол рассогласования, как правило, больше нуля.