

Идентификация динамического объекта явным мнк
Рассмотрим применение явной формы МНК
для параметрической идентификации той
же АРСС-модели объекта второго порядка
с учетом заданных порядков
![]() .
.
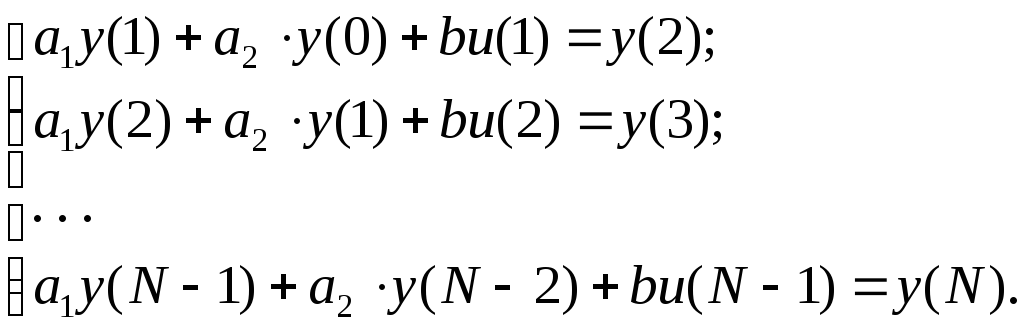
Использование модели для оценок
коэффициентов
![]() на основе выборки изN(от 1 доN) экспериментальных
данных приводит к следующей системе
уравнений вида
на основе выборки изN(от 1 доN) экспериментальных
данных приводит к следующей системе
уравнений вида
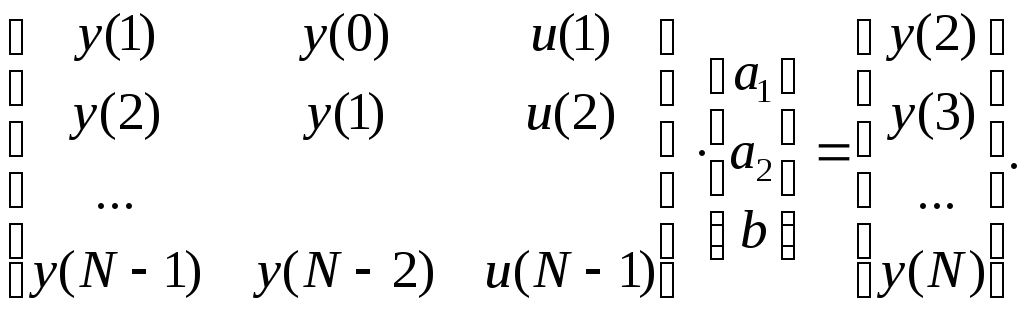
Матричная форма записи данной модели имеет стандартный вид линейной модели:
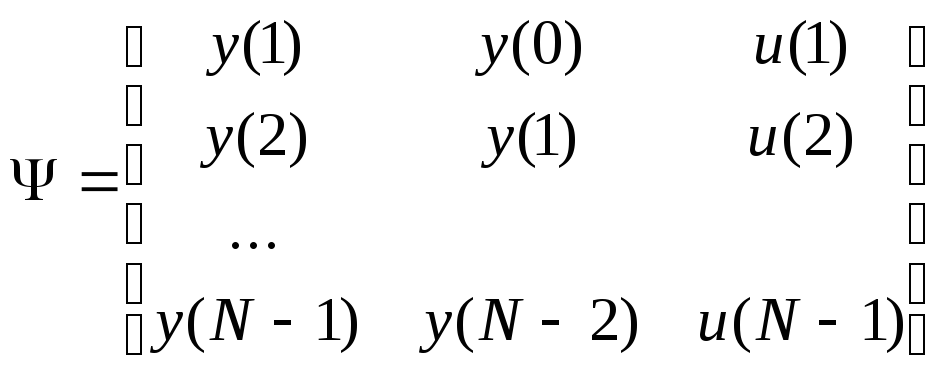
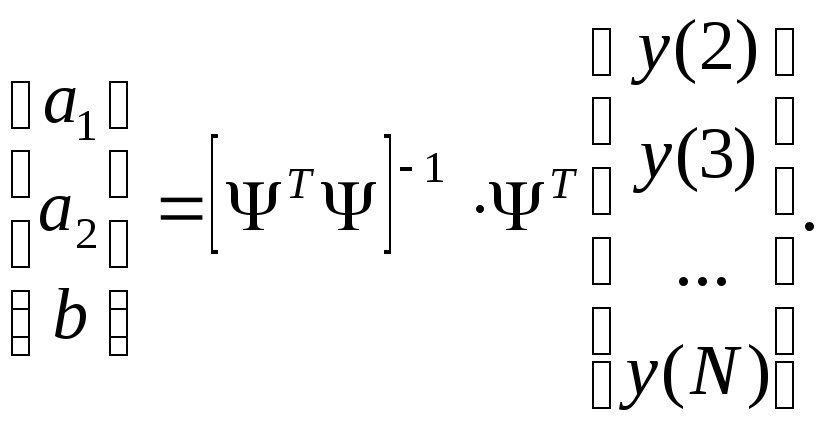
С учетом обозначения матрицы исходных данных входа-выхода
параметры дискретной модели
![]() определяются на основе общего соотношения
МНК следующим образом:
определяются на основе общего соотношения
МНК следующим образом:
Приведем программную реализацию явного
МНК объекта второго порядка с передаточной
функцией
![]() и коэффициентами
и коэффициентами![]() .
.
s1=tf([25],[36 15 1])% непрерывная передаточная функция объекта
T_end=60;% интервал измерений
dt=0.2;% шаг дискретизации
t=0:dt:T_end;% массив дискретного времени
N=length(t);% размер выборки
u=ones(N,1);% моделирование единичного входного воздействия
y=lsim(s1,u,t);% моделирование выходного воздействия
n=2;% порядок объекта
R=[y(n:N-1)y(n-1:N-2)u(n:N-1)];% формирование расширенной матрицы данных
Y=y(n+1:N);% формирование вектора выходных данных
betta=inv(R'*R)*R'*Y;
% расчет параметров непрерывной модели
T1=dt^2/(1-betta(1)-betta(2))
T2=(betta(2)*T1+T1+dt^2)/dt
K=betta(3)*T1/dt^2
Рассчитанные оценки параметров дискретной модели:
a1 = 1,9190;a2 = -0,9200;b= 0,0266.
Рассчитанные оценки параметров непрерывной модели:
T1 = 37,5243; T2 =15,2014; K = 25,0000.
Из полученных результатов видна удовлетворительная точность оценивания параметров. При этом расчетная практика показывает, что метод чувствителен к помехам, их целесообразно отфильтровывать.
Идентификация динамического объекта рекуррентным мнк
Приведем программную реализацию
оценивания параметров
![]() объекта из предыдущего примера с помощью
рекуррентного МНК при использовании
АРСС-модели объекта второго порядка.
объекта из предыдущего примера с помощью
рекуррентного МНК при использовании
АРСС-модели объекта второго порядка.
s1=tf([25],[36 15 1])% непрерывная передаточная функция объекта
T_end=60;% интервал измерений
dt=0.2;% шаг дискретизации
t=0:dt:T_end;% массив дискретного времени
N=length(t);% размер выборки
u=ones(N,1);% массив значений единичного входного воздействия
y=lsim(s1,u,t);%массив значений выходного воздействия
n=2;% порядок объекта
I=diag([1 1 1]);
i=1;% начальный шаг
P=1000*I;% начальное приближение
betta=[0;0;0];
bet(i,:)=betta;% массив оценок параметров
% очередной шаг вычислений
fori=n:N-1
R=[y(i+n-2:-1:i-1);u(i+n-2:-1:i)]';% формирование расширенной матрицы данных
gamma=P*R'/(R*P*R'+1);
betta=betta+gamma*(y(i+1)-R*betta);
P=(I-gamma*R)*P;
bet(i,:)=betta;
end;
plot(bet,'+');
T1=dt^2/(1-betta(1)-betta(2))% расчет параметров непрерывной модели
T2=(betta(2)*T1+T1+dt^2)/dt:
K=betta(3)*T1/dt^2.
Оценки параметров непрерывной модели:
T1 = 35,6366; T2 =15,4333; K = 25,0975.
Из полученных расчетных результатов видна высокая точность оценивания всех параметров модели. Расчетная практика показывает, что рекуррентный МНК по сравнению с его явной формой обладает лучшей сходимостью и требует для достижения той же точности выполнения меньшего количества шагов и, соответственно, вычислений.
Задание
1. Провести эксперимент с моделью, соответствующей вашему варианту. Модель взять из файла по адресу \\auts0\Student\ИДС\plant_model_2012_5.mdl. Номер модели совпадает с номером вашей бригады. Зафиксировать переходную характеристику.
2. Провести идентификацию с помощью МНК.
3. Верифицировать полученные модели.
5. Сделать выводы о проделанной работе.
Контрольные вопросы
1. Сформулировать критерий идентификации при использовании МНК.
2. В чем состоит отличие явной формы МНК от рекуррентной?
3. Как формируются матрицы экспериментальных данных в том и другом случае?
Лабораторная работа №3
Параметрическая идентификация импульсной переходной функции объекта
Цель работы.
Освоить применение явной и рекуррентной формы МНК для параметрической идентификации заданной модели объекта.
Теоретические сведения
Требуется определить ИПФ по результатам измерений входного и выходного сигналов на конечном промежутке времени длительностью Т в условиях действия помехи типа белого шума, приведенной к выходу.
Выходной сигнал линейной стационарной системы при нулевых начальных условиях выражается стандартным интегралом свертки
![]()
где
![]() – импульсная переходная функция.
– импульсная переходная функция.
Проведем
временную дискретизацию уравнения с
равномерным интервалом квантования
![]() .
Выходной сигнал в произвольный момент
времени
.
Выходной сигнал в произвольный момент
времени![]() определяется следующим соотношением:
определяется следующим соотношением:
![]()
где
![]() – время измерения выходного сигнала;
– время измерения выходного сигнала;![]() – время оценивания, т.е. установления
реакции ИПФ (не более 5% от своего пикового
значения).
– время оценивания, т.е. установления
реакции ИПФ (не более 5% от своего пикового
значения).
Запишем выражение в компактном виде:
![]()
![]() ,
,
где
![]()
Проведенная процедура дискретизации
во времени приводит к тому, что оценивание
непрерывной функции
![]() заменяется оцениванием конечного
множества параметров
заменяется оцениванием конечного
множества параметров![]() .
.
Выражения в развернутом виде представляются следующим образом:
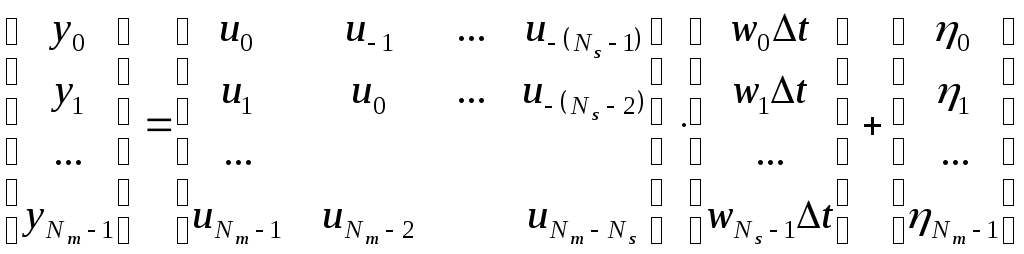
или в матричной форме:![]() ,
,
где
![]() – вектор-столбец идентифицируемых
параметров,
– вектор-столбец идентифицируемых
параметров,![]() иU– вектор-столбцы и
матрица соответствующих выборочных
значений.
иU– вектор-столбцы и
матрица соответствующих выборочных
значений.
Таким образом, оценивание ИПФ сводится
к оцениванию вектора параметров
![]() при заданной матрицеUи векторе измеренийу. Результатом
оценивания является нахождение вектора
при заданной матрицеUи векторе измеренийу. Результатом
оценивания является нахождение вектора![]() ,
минимизирующего сумму квадратов невязок
на интервале измерения
,
минимизирующего сумму квадратов невязок
на интервале измерения
![]()
Оценка по МНК
![]() находится из условия экстремума
функционала
находится из условия экстремума
функционала
![]()
Система уравнений в матричной форме имеет вид:
![]()
и ее решение относительно вектора параметров находится следующим образом:
![]()
Соответственно, выражение явной формы метода наименьших квадратов для оценивания конечного множества параметров импульсной переходной характеристики принимает следующий вид:
![]()
Перепишем уравнение относительно сумм выборочных значений сигналов:
 .
.
Методический пример
Выполнение работы:
Идентифицируем объект с помощью случайной последовательности 1 и -1, то есть подадим на вход генератор случайных чисел, ограниченный значениями 1 и -1.
Открываем Matlab Simulinkнажатием на
значок![]() на панели инструментов и строим там
следующую модель:
на панели инструментов и строим там
следующую модель:
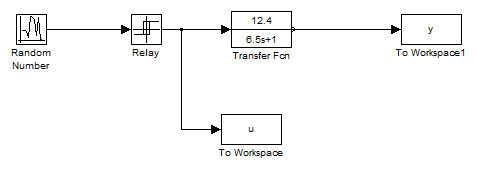
Рис. Имитационное моделирование системы.
Для этого выбираем File/NewModelи перетаскиваем на свободное пространство необходимые блоки из Simulink Library Browser. Теперь все элементы соединяем стрелочками. Потом жмем на значок треугольника в панели инструментов наверху.
Подробнее рассмотрим построение данной модели в математическом пакете Matlab.
В качестве исследуемого объекта возьмем
апериодическое звено 1-го порядка, с
заранее известными параметрами:![]()
Т=6,5[c],k=12,4.
В блоке Transfer Function мы задаем эти параметры, нажав на самом блоке 2 раза левой кнопкой мышки.
В параметр Numerator coefficientsмы записываем значение, которое пишется в числитель, т.е.12,4.
В Denominator coefficients мы записываем коэффициенты знаменателя.
Блок Random Number – источник дискретного сигнала, значения которого являются случайной величиной, распределенной по нормальному (гауссовому) закону:
Установим в диалоговом окне Simulation/Parametersфиксированный тип шага и модель третьего порядка в качестве метода.
Возьмем нужное число первых значений переменной u и сформируем квадратную матрицу
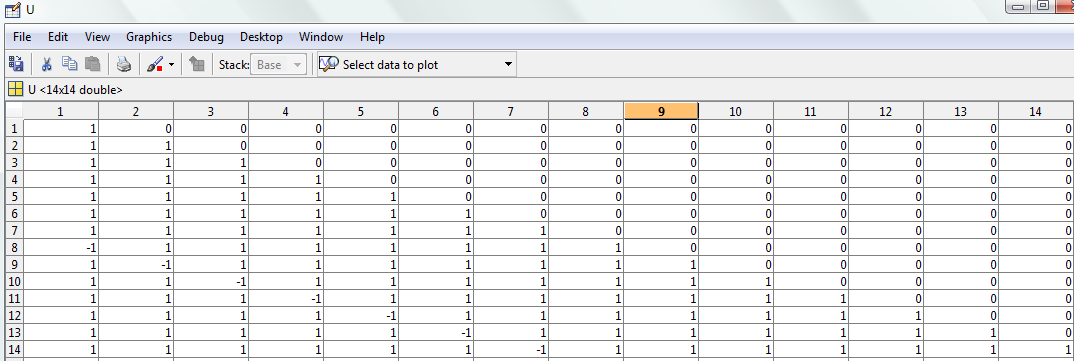
Полученные результаты
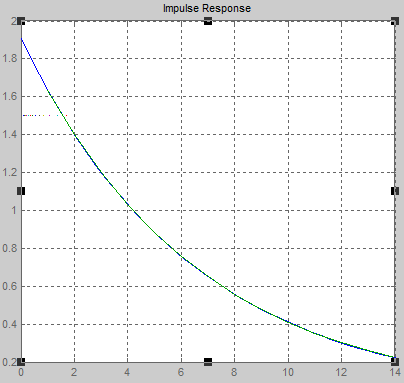
Рисунок – Сравнение результатов идентификации